TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025067278
公報種別
公開特許公報(A)
公開日
2025-04-24
出願番号
2023177160
出願日
2023-10-13
発明の名称
レーダ装置、レーダシステム及びPRI選択方法
出願人
三菱電機株式会社
代理人
個人
,
個人
,
個人
主分類
G01S
13/12 20060101AFI20250417BHJP(測定;試験)
要約
【課題】クラッタと目標信号とが近接する場合に、クラッタに目標信号が埋もれることなく検出可能なPRIを選択することができるレーダ装置を提供する。
【解決手段】本開示のレーダ装置は、目標との距離である目標距離、前記目標の速度である目標速度及びクラッタ発生領域との距離であるクラッタ距離を用いて除去するクラッタを判定し、前記除去するクラッタについてのクラッタ距離からの信号を受信できないPRIを選択するPRI選択部を備える。
【選択図】図1
特許請求の範囲
【請求項1】
目標との距離である目標距離、前記目標の速度である目標速度及びクラッタ発生領域との距離であるクラッタ距離を用いて除去するクラッタを判定し、前記除去するクラッタについての前記クラッタ距離からの信号を受信できないPRIを選択するPRI選択部
を備えるレーダ装置。
続きを表示(約 1,400 文字)
【請求項2】
前記PRI選択部は、前記除去するクラッタについての前記クラッタ距離からの信号を受信できず、かつ前記目標距離からの信号を受信できるPRIを選択する、
請求項1に記載のレーダ装置。
【請求項3】
任意の時刻における前記目標の位置及び前記時刻における前記目標の速度を含む初期情報を取得し、前記目標の位置との距離を前記目標距離として取得し、前記目標の速度を前記目標速度として取得する目標信号処理部をさらに備える、
請求項1に記載のレーダ装置。
【請求項4】
前記目標信号処理部は、前記目標からの反射波である目標信号から検出した前記目標の位置及び前記目標の速度を用いて前記目標の軌跡を予測して予想目標距離及び予想目標速度を算出し、
前記PRI選択部は、前記予想目標距離を前記目標距離とし、前記予想目標速度を前記目標速度として前記除去するクラッタを判定する、請求項3に記載のレーダ装置。
【請求項5】
3次元地図を用いて前記クラッタ発生領域の位置を取得し、前記3次元地図を用いて取得した前記クラッタ発生領域の位置を用いて前記クラッタ距離を取得するクラッタ処理部をさらに備える、
請求項1に記載のレーダ装置。
【請求項6】
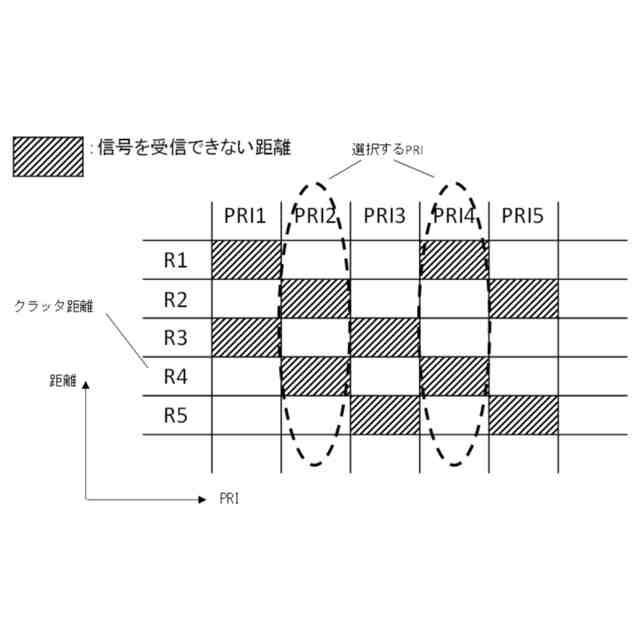
前記PRI選択部は、送信可能なPRIに対して、信号を受信できない距離を示す情報であるPRI-距離マップを用いて前記除去するクラッタについての前記クラッタ距離からの信号を受信できないPRIの中で大きいものを選択する、請求項1に記載のレーダ装置。
【請求項7】
第一の目標の目標距離、前記第一の目標の目標速度を取得し、前記第一の目標についての目標距離、前記第一の目標についての目標速度及びクラッタ発生領域との距離であるクラッタ距離を用いて除去するクラッタを判定し、前記除去するクラッタについての前記クラッタ距離からの信号を受信できないPRIを選択した後に、前記第一の目標と異なる第二の目標についての目標距離、前記第二の目標についての目標速度を取得し、前記第二の目標についての目標距離、前記第二の目標についての目標速度及び前記クラッタ距離を用いて除去するクラッタを判定し、前記除去するクラッタについてのクラッタ距離からの信号を受信できないPRIを選択するPRI選択部
を備えるレーダ装置。
【請求項8】
任意の時刻における目標の位置及び前記時刻における目標の速度を含む初期情報を送信する母機と、
前記初期情報から、前記目標との距離である目標距離及び前記目標の速度である目標速度を取得する目標信号処理部と、
クラッタ発生領域との距離であるクラッタ距離を取得するクラッタ処理部と、
前記目標距離、前記目標速度及びクラッタ発生領域との距離であるクラッタ距離を用いて除去するクラッタを判定し、前記除去するクラッタについてのクラッタ距離からの信号を受信できないPRIを選択するPRI選択部と、
を備えるレーダシステム。
【請求項9】
目標との距離である目標距離、前記目標の速度である目標速度及びクラッタ発生領域との距離であるクラッタ距離を用いて除去するクラッタを判定するクラッタ除去判定工程と、
前記除去するクラッタについてのクラッタ距離からの信号を受信できないPRIを選択するPRI選択工程と、
を備えるPRI選択方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、レーダ装置及びレーダ装置を用いたレーダシステムに関するものである。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
従来のレーダ装置として、特許文献1には、直下クラッタに目標信号が重なり、目標が検出できなくなること防ぐため、直下クラッタの発生領域と目標信号の検出位置がレンジ方向で近接しない送信信号のPRI(Pulse Reptition Interval、パルス繰返し周期)を選択する直下クラッタ評価処理を行う信号処理器を備えるものが開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2011-163968号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記した従来のレーダ装置では、クラッタと目標からの反射波である目標信号とが近接する場合に目標が検出できないという課題があった。
【0005】
本開示は上記した問題点を解決するためになされたものであり、クラッタと目標信号とが近接する場合に、目標信号がクラッタに埋もれることなく検出可能なPRIを選択することができるレーダ装置を得ることを目的とする。
【0006】
ここで、クラッタとは、レーダ装置の送信信号が地表または海面その他の目標と異なる物体から反射されて発生する信号である。
【課題を解決するための手段】
【0007】
本開示のレーダ装置は、目標との距離である目標距離、前記目標の速度である目標速度及びクラッタ発生領域との距離であるクラッタ距離を用いて除去するクラッタを判定し、前記除去するクラッタについてのクラッタ距離からの信号を受信できないPRIを選択するPRI選択部を備える。
【発明の効果】
【0008】
本開示のレーダ装置は、クラッタと目標信号が近接する場合にクラッタに目標信号が埋もれることなく検出可能なPRIを選択できる。
【図面の簡単な説明】
【0009】
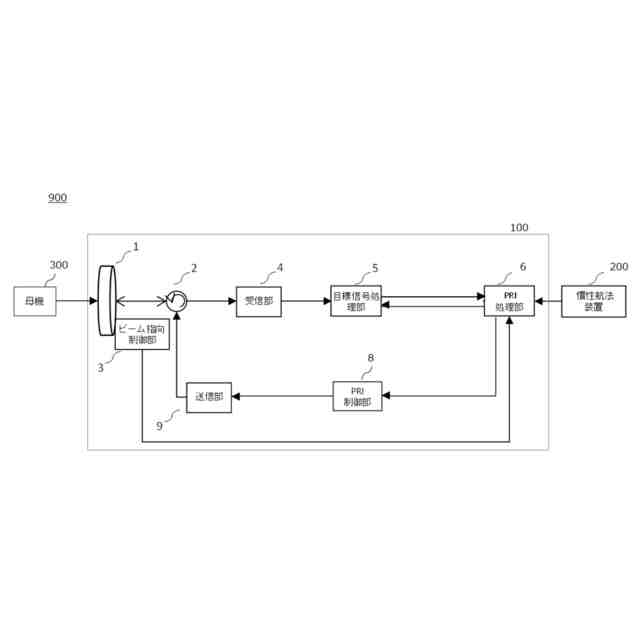
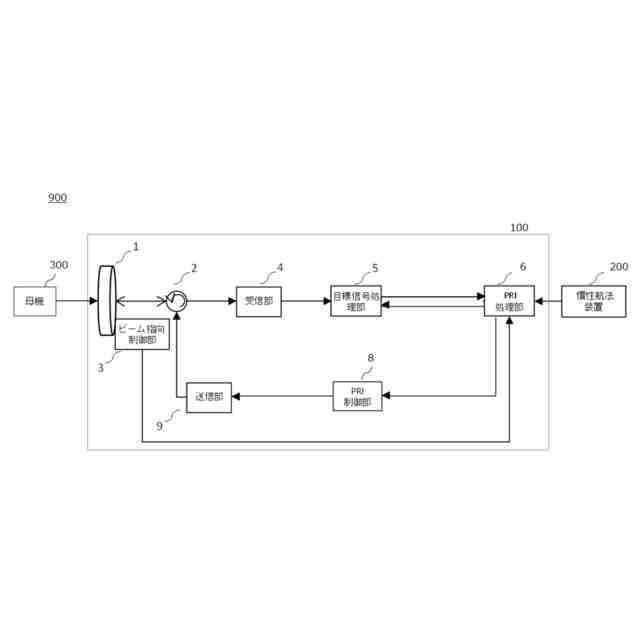
実施の形態1に係るレーダシステムの構成を示すブロック図である。
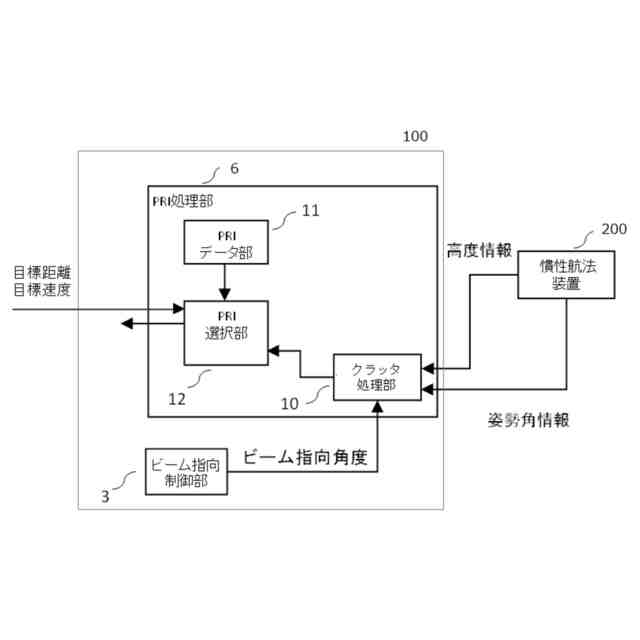
実施の形態1に係るPRI処理部の構成を示すブロック図である。
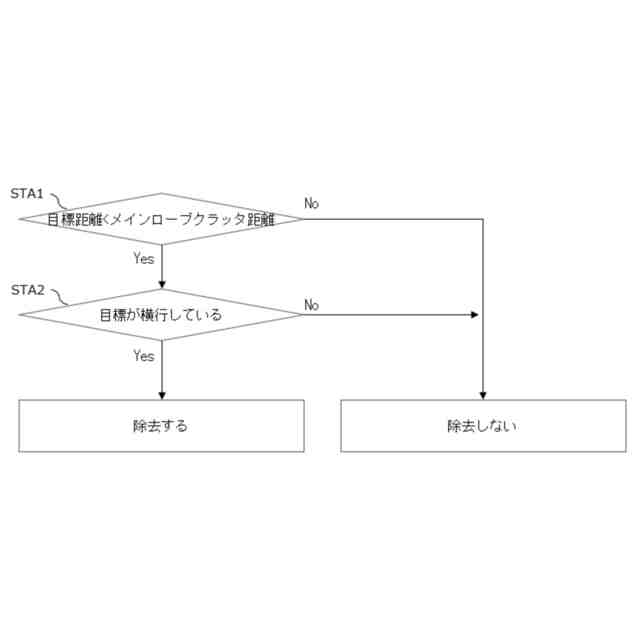
メインローブクラッタ除去判定工程を示す図である。
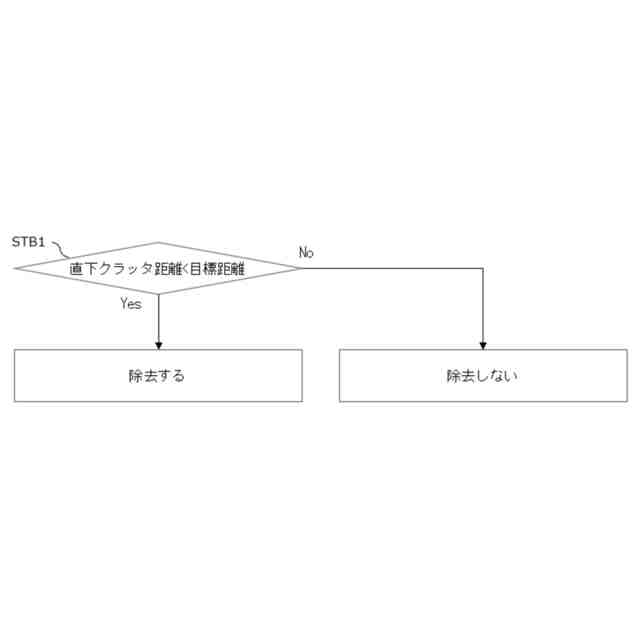
直下クラッタ除去判定工程を示す図である。
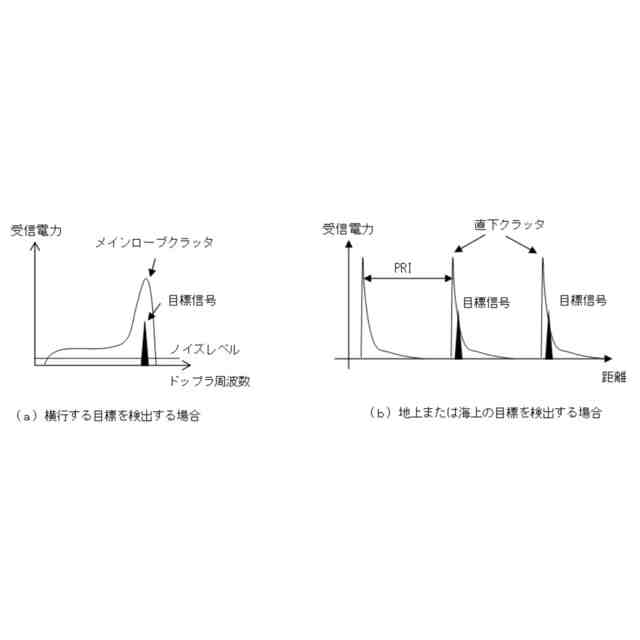
横行する目標を検出する場合(a)、地上または海上を移動する目標を検出する場合(b)におけるレーダシステムの適用例を示す図である。
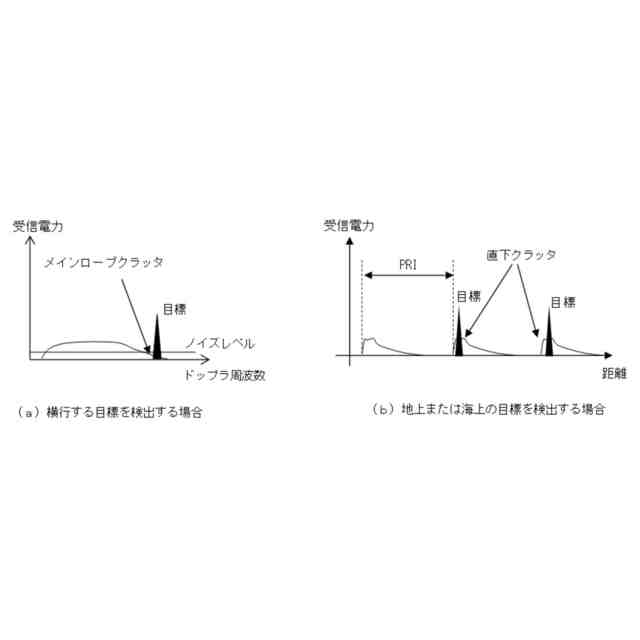
図5における受信電力を示す図である。
実施の形態1に係るPRI選択工程を示す図である。
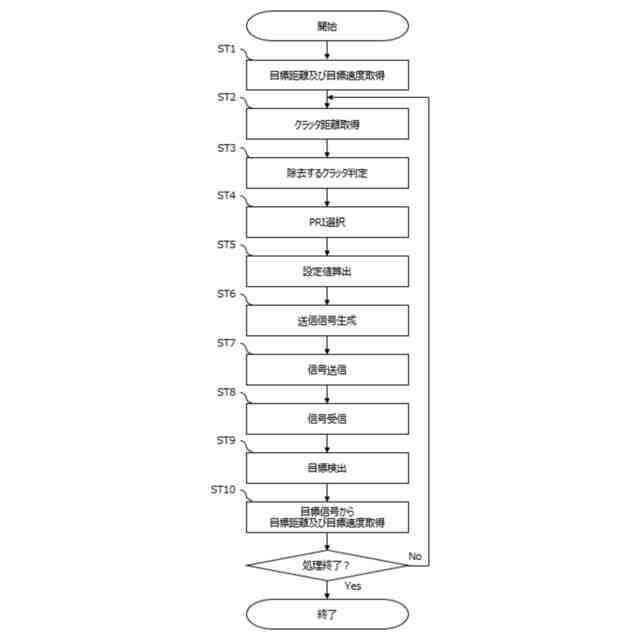
レーダシステムの動作を示すフローチャートである。
図5の場合に、PRI選択部がPRIを選択したときの受信電力を示す図である。
実施の形態2に係るPRI処理部の構成を示すブロック図である。
実施の形態2に係るPRI選択工程を示す図である。
実施の形態1に係るレーダシステムの構成を示す図である。
【発明を実施するための形態】
【0010】
以下、本開示の実施の形態について、図面を参照して説明する。なお、以下の説明では、同様の構成要素には同じ符号を付して図示し、それらの名称及び機能も同一又は同様のものとする。よって、それらについての詳細な説明を省略する場合がある。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
他の特許を見る

 特許ウォッチ
特許ウォッチ