TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025061564
公報種別
公開特許公報(A)
公開日
2025-04-10
出願番号
2025008734,2023047042
出願日
2025-01-21,2020-07-14
発明の名称
潜在事故責任決定装置
出願人
株式会社SOKEN
,
株式会社デンソー
代理人
個人
,
個人
主分類
G08G
1/00 20060101AFI20250403BHJP(信号)
要約
【課題】潜在事故責任情報の信頼性を確認することを可能にする走行記憶システム、および走行記録方法を提供すること。
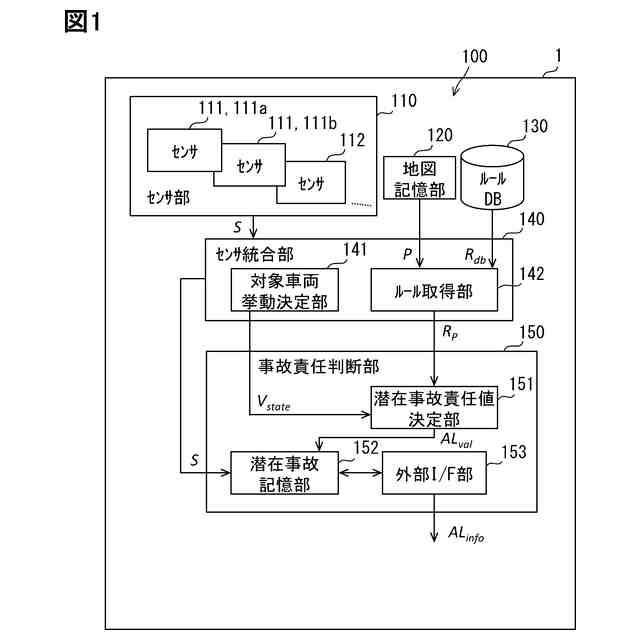
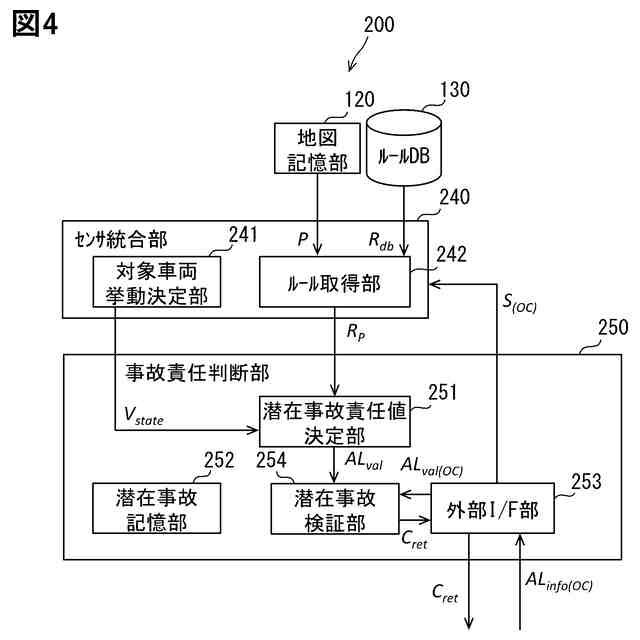
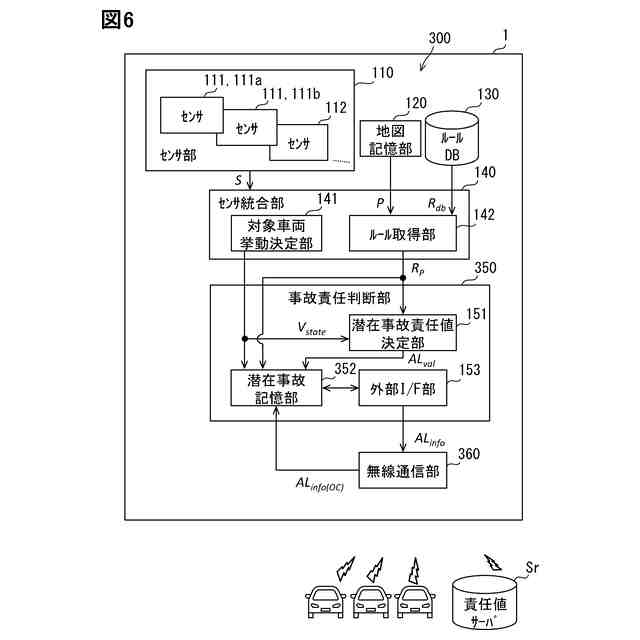
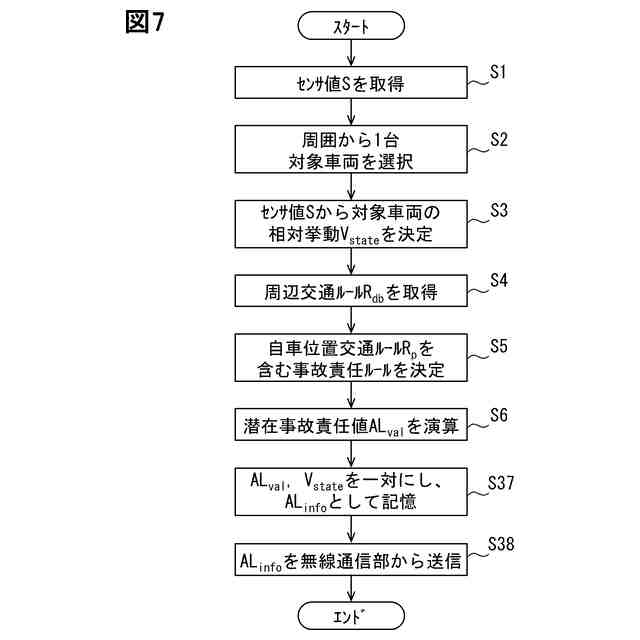
【解決手段】自車両(1)の周囲に存在する周辺車両の挙動を示すセンサ(111)からセンサ値(S)を取得し、センサ値(S)に基づいて、周辺車両から選択した対象車両の自車両(1)に対する相対挙動(V)を逐次決定する対象車両挙動決定部(141)と、自車両(1)の現在位置における事故責任ルールを取得するルール取得部(142)と、対象車両の相対挙動(V)と事故責任ルールとに基づいて、対象車両と自車両(1)との間に想定される事故に対する自車両(1)の責任の程度を示す潜在事故責任値(AL)を逐次決定する潜在事故責任値決定部(151)と、潜在事故責任値(AL)と、潜在事故責任値(AL)を決定するために用いた情報である責任値決定情報(R)とを対応づけて記憶する潜在事故記憶部(152)とを備える。
【選択図】図1
特許請求の範囲
【請求項1】
自動運転と、前記自動運転を実施しない非自動運転とに切り替え可能な車両で用いられ、
前記車両または前記車両の周辺で事故が生じた場合に事故の状況を確認できる可能性がある映像である事故確認映像を撮影する車載カメラから、前記事故確認映像を逐次取得する映像取得部と、
前記車両が前記自動運転と前記非自動運転とのいずれの運転状態かを特定する運転特定部(1203)と、
前記事故確認映像と、前記運転特定部で特定した前記事故確認映像が取得される時点における前記車両の前記運転状態を特定できる情報とを対応付けて、または、対応付け可能に記録装置に保存する保存処理部(1207、1207a、11207)を備え、
前記事故確認映像と前記運転状態を特定できる情報は、対応付け指標により互いに対応づけられており、
前記記録装置として、
前記事故確認映像を前記対応付け指標とともに保存する映像記録装置(1021)と、前記運転状態を特定できる情報を前記対応付け指標とともに保存する運転状態記録装置(1127)とを備え、
前記対応付け指標はタイムスタンプであり、
前記タイムスタンプに用いられる計測時刻を計測する計時部(1124,11203)と、
前記計測時刻とGNSS人工衛星が送信する時刻に基づく基準時刻との時刻差をもとに、単位経過時間当たりの時刻誤差を算出する時刻補正部(1125,11204)と、をさらに備え、
前記映像記録装置および前記運転状態記録装置には、前記タイムスタンプとともに、前記時刻誤差も記録されている、映像記録システム。
続きを表示(約 2,700 文字)
【請求項2】
自動運転と、前記自動運転を実施しない非自動運転とに切り替え可能な車両で用いられ、
前記車両または前記車両の周辺で事故が生じた場合に事故の状況を確認できる可能性がある映像である事故確認映像を撮影する車載カメラから、前記事故確認映像を逐次取得する映像取得部と、
前記車両が前記自動運転と前記非自動運転とのいずれの運転状態かを特定する運転特定部(1203)と、
前記事故確認映像と、前記運転特定部で特定した前記事故確認映像が取得される時点における前記車両の前記運転状態を特定できる情報とを対応付けて、または、対応付け可能に記録装置に保存する保存処理部(1207、1207a、11207)を備え、
前記事故確認映像と前記運転状態を特定できる情報は、対応付け指標により互いに対応づけられており、
前記記録装置として、
前記事故確認映像を前記対応付け指標とともに保存する映像記録装置(1021)と、前記運転状態を特定できる情報を前記対応付け指標とともに保存する運転状態記録装置(1127)とを備え、
前記対応付け指標はタイムスタンプであり、
前記タイムスタンプに用いられる計測時刻を計測する計時部(1124,11203)と、
前記計測時刻とGNSS人工衛星が送信する時刻に基づく基準時刻との時刻差をもとに、単位経過時間当たりの時刻誤差と、前記時刻誤差を母集団とした標準偏差である時刻精度とを、算出する時刻補正部(1125,11204)と、をさらに備え、
前記映像記録装置および前記運転状態記録装置には、前記タイムスタンプとともに、前記時刻精度も記録されている、映像記録システム。
【請求項3】
前記映像記録装置および前記運転状態記録装置には、前記タイムスタンプとともに、前記時刻誤差及び前記時刻精度が記録されている、請求項2に記載の映像記録システム。
【請求項4】
前記事故確認映像に、前記車両の周辺が撮影された映像が含まれる、請求項1~3のいずれか1項に記載の映像記録システム。
【請求項5】
前記事故確認映像に、前記車両の車室内が撮影された映像が含まれる、請求項1~3のいずれか1項に記載の映像記録システム。
【請求項6】
前記車両に設けられて前記車両の周辺を撮影する車外用カメラ(1051)で撮影する映像である車外映像を前記事故確認映像として逐次取得する車外映像取得部(1201)を、前記映像取得部として備え、さらに、
前記車両と前記車両の周辺障害物との間及び前記車両の周辺車両同士の間の少なくともいずれかの対象間の衝突危険性の有無を判定する危険性判定部(1204)と、
前記危険性判定部で前記対象間の前記衝突危険性が有りと判定することをトリガに、前記車外映像取得部で逐次取得する前記車外映像と、前記運転特定部で特定したその車外映像が取得される時点における前記車両の前記運転状態を特定できる情報とを、前記記録装置に保存する保存対象とする保存対象決定部(1205)とを備える請求項4に記載の映像記録システム。
【請求項7】
前記保存対象決定部は、前記危険性判定部で前記対象間の前記衝突危険性が有りと判定していない場合であっても、前記車両の前記運転状態が、前記自動運転から前記非自動運転に切り替わることをトリガに、前記車外映像取得部で逐次取得する前記車外映像と、前記運転特定部で特定するその車外映像が取得される時点における前記車両の前記運転状態を特定できる情報とを前記保存対象とする請求項6に記載の映像記録システム。
【請求項8】
自動運転と、前記自動運転を実施しない非自動運転とに切り替え可能な車両で用いられ、
前記車両または前記車両の周辺で事故が生じた場合に事故の状況を確認できる可能性がある映像である事故確認映像を撮影する車載カメラから、前記事故確認映像を逐次取得する映像取得部と、
前記車両が前記自動運転と前記非自動運転とのいずれの運転状態かを特定する運転特定部(1203)と、
前記事故確認映像と、前記運転特定部で特定した前記事故確認映像が取得される時点における前記車両の前記運転状態を特定できる情報とを対応付けて、または、対応付け可能に記録装置に保存する保存処理部(1207、1207a、11207)を備え、
前記事故確認映像に、前記車両の周辺が撮影された映像が含まれ、
前記車両に設けられて前記車両の周辺を撮影する車外用カメラ(1051)で撮影する映像である車外映像を前記事故確認映像として逐次取得する車外映像取得部(1201)を、前記映像取得部として備え、さらに、
前記車両と前記車両の周辺障害物との間及び前記車両の周辺車両同士の間の少なくともいずれかの対象間の衝突危険性の有無を判定する危険性判定部(1204)と、
前記危険性判定部で前記対象間の前記衝突危険性が有りと判定することをトリガに、前記車外映像取得部で逐次取得する前記車外映像と、前記運転特定部で特定したその車外映像が取得される時点における前記車両の前記運転状態を特定できる情報とを、前記記録装置に保存する保存対象とする保存対象決定部(1205)とを備え、
前記保存対象決定部は、前記危険性判定部で前記対象間の前記衝突危険性が有りと判定していない場合であっても、前記車両の前記運転状態が、前記自動運転から前記非自動運転に切り替わることをトリガに、前記車外映像取得部で逐次取得する前記車外映像と、前記運転特定部で特定するその車外映像が取得される時点における前記車両の前記運転状態を特定できる情報とを前記保存対象とする、映像記録システム。
【請求項9】
前記危険性判定部で前記対象間の前記衝突危険性が有りと判定したその対象間の事故の発生を検出する事故検出部(1206)を備え、
前記保存処理部は、前記事故検出部で前記事故の発生を検出する場合に、少なくとも前記事故の発生までの前記保存対象を前記記録装置に保存する請求項6~8のいずれか1項に記載の映像記録システム。
【請求項10】
前記保存処理部は、前記事故検出部で前記事故の発生を検出する場合に、前記事故の発生の所定時間後までの前記保存対象を前記記録装置に保存する請求項9に記載の映像記録システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【関連出願の相互参照】
【0001】
本出願は、2019年7月15日に日本に出願された特許出願第2019-130771号および2019年7月16日に日本に出願された特許出願第2019-131256号を基礎としており、基礎の出願の内容を、全体的に、参照により援用している。
続きを表示(約 1,800 文字)
【技術分野】
【0002】
本開示は、映像記録システム、自動運転システム、および映像記録方法に関する。
【背景技術】
【0003】
特許文献1には、目標車両の運転状態を推定し、その状態と運転規則を比較することで、潜在的な事故責任値(以下、潜在事故責任値)を演算する装置が開示されている。この装置は、演算した潜在事故責任値を記憶し、事故後に出力する。
【0004】
特許文献2には、車両の事故の原因を特定可能とするために、衝突の発生又はそのおそれの高いことを検出した場合に、車両の進行方向前方の映像をカメラで撮影して保存する技術が開示されている。また、車両の運転操作を自動化する自動運転が知られている。自動運転の度合いとしては、例えば米国自動車技術会(Society of Automotive Engineers:SAE)が定義しているように、複数の段階が存在し得る。例えば、運転操作が完全に自動化される車両においては、乗員は、周囲の安全監視義務といった運転者としての法律上の責任を負わなくなることが想定されている。先行技術文献の記載内容は、この明細書における技術的要素の説明として、参照により援用される。
【先行技術文献】
【特許文献】
【0005】
国際公開第2018/115963号
特開2009-157554号公報
【発明の概要】
【0006】
潜在事故責任値は、事故が起きてしまった場合に、事故に関わっている車両に対して事故の責任を決定する際に用いることができる。潜在事故責任値を用いて、事故に関わっている車両に対する事故の責任を決定するためには、潜在事故責任値の信頼性が高くなければならない。しかし、潜在事故責任値は、単なるスカラー値であり、改ざんされる恐れがある。よって、潜在事故責任値の信頼性を確認できることが望まれる。また、潜在事故責任値が改ざんされていなくても、装置のメーカー、バージョン等が異なると、潜在事故責任値の決定アルゴリズムが異なる可能性がある。そうすると、同じ状況でも、装置のメーカー、バージョン等の違いにより、潜在事故責任値の値が異なる恐れがある。よって、潜在事故責任値の信頼性を、後で別の装置により確認できることが望まれる。
【0007】
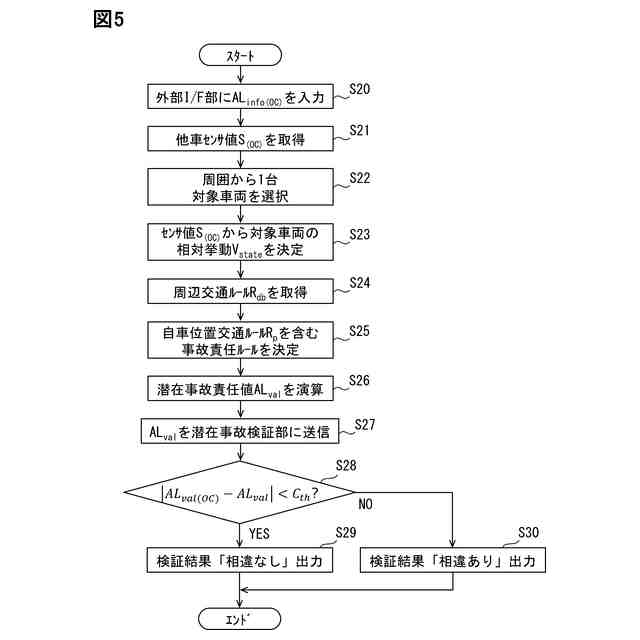
また、潜在事故責任値は、予め定められている決定方法で決定される値である。それに対して、実際の事故が起きる状況は様々である。したがって、潜在事故責任値が改ざんされていなくても、周囲の状況を考慮すると、潜在事故責任値が、事故を起こした車両の責任を適切に表していない可能性もある。この点でも、潜在事故責任値が信頼できるかを確認できることが望まれる。また、潜在事故責任値から決定できる責任の有無についても、信頼できるかを確認できることが望まれる。以下では、潜在事故責任値と、潜在事故責任値から決定できる責任の有無を含む概念を、潜在事故責任情報とする。
【0008】
特許文献2に開示の技術では、衝突の発生又はそのおそれの高いことを検出した場合に、自車の進行方向前方の映像を保存する。しかしながら、自車が自動運転の度合い(以下、自動運転レベル)を切り替え可能な車両である場合に、保存した映像からでは、自動運転中の走行映像か、非自動運転中の走行映像かを区別することが難しい。よって、事故が発生した場合に、保存した映像から自車の自動運転に責任がないことを証明することが難しい。また、自車の周辺車両同士に事故が発生した場合にも、保存した映像から自車の自動運転に責任がないことを証明することが難しい。
【0009】
この開示の1つの目的は、事故の発生に対して自動運転に責任がないことを証明しやすくすることを可能にする映像記録システム、自動運転システム、および映像記録方法を提供することにある。
【0010】
上記目的は独立請求項に記載の特徴の組み合わせにより達成され、また、下位請求項は更なる有利な具体例を規定する。特許請求の範囲に記載した括弧内の符号は、一つの態様として後述する実施形態に記載の具体的手段との対応関係を示すものであって、開示した技術的範囲を限定するものではない。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
他の特許を見る
 特許ウォッチ
特許ウォッチ