TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025054824
公報種別
公開特許公報(A)
公開日
2025-04-08
出願番号
2023163989
出願日
2023-09-26
発明の名称
情報処理システム、情報処理方法及び情報処理プログラム
出願人
富士フイルム株式会社
代理人
弁理士法人太陽国際特許事務所
主分類
B25J
19/06 20060101AFI20250331BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ロボットを適切に操作できる情報処理システム、情報処理方法及び情報処理プログラムを提供する。
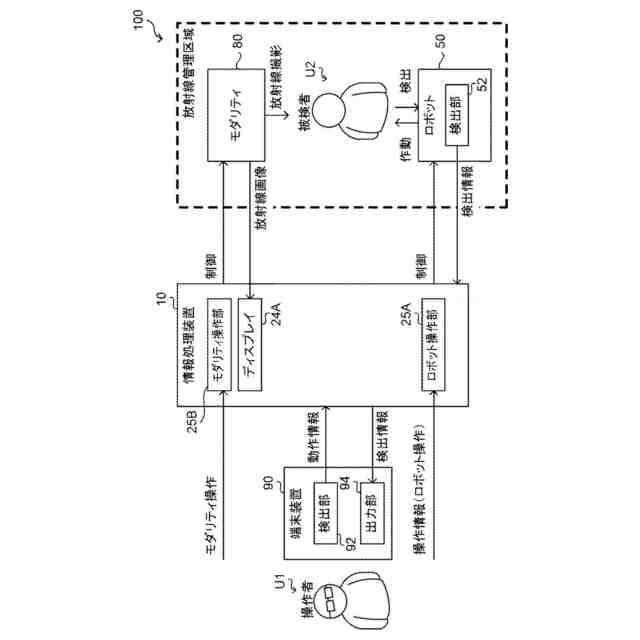
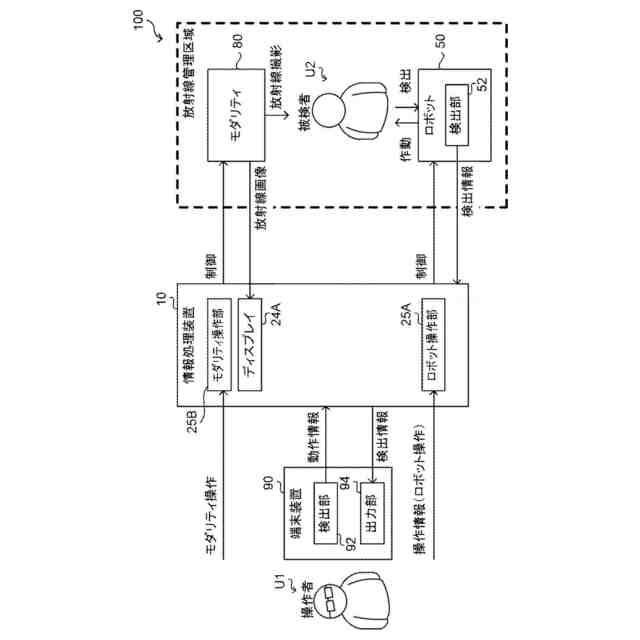
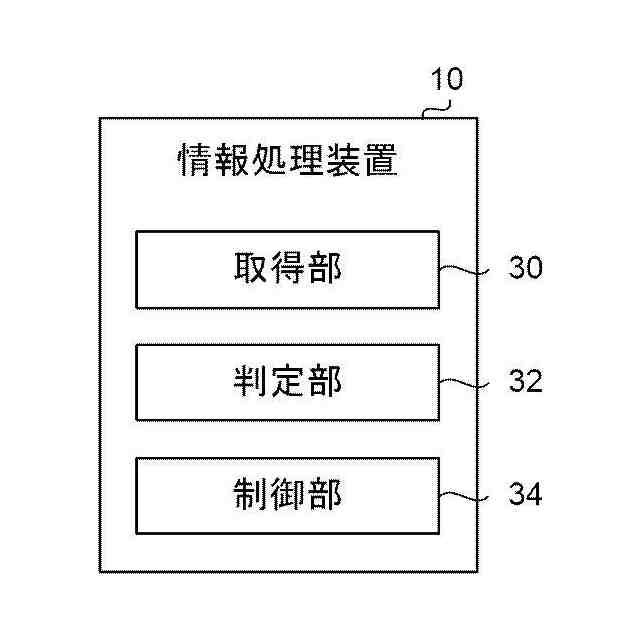
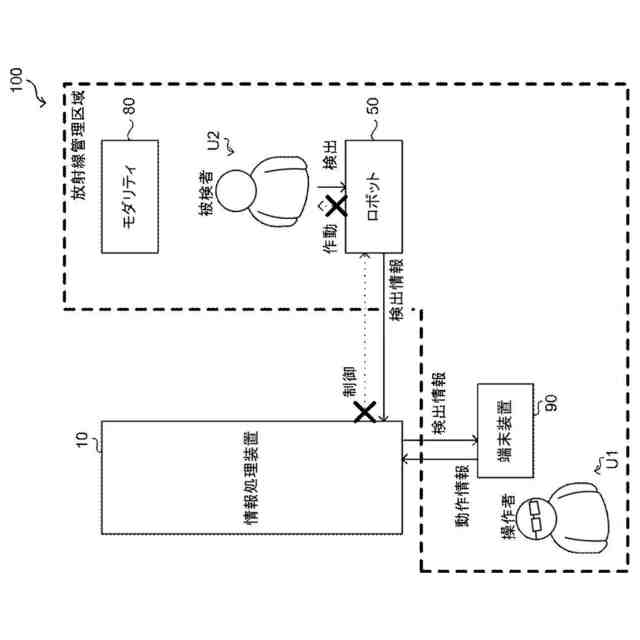
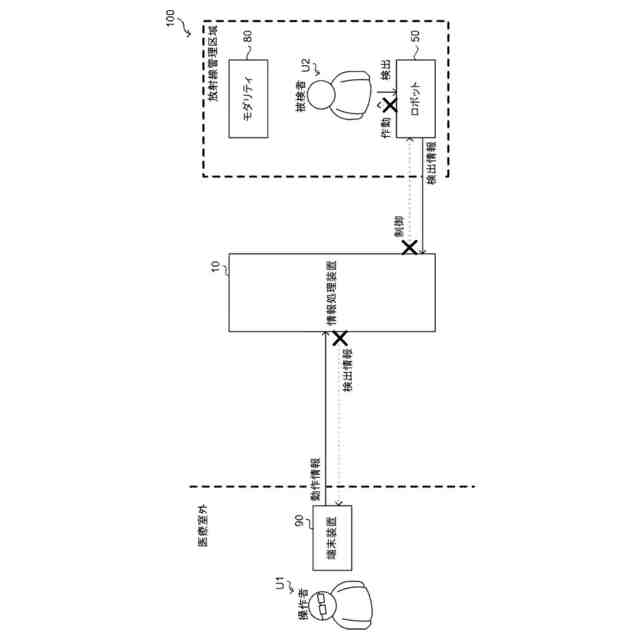
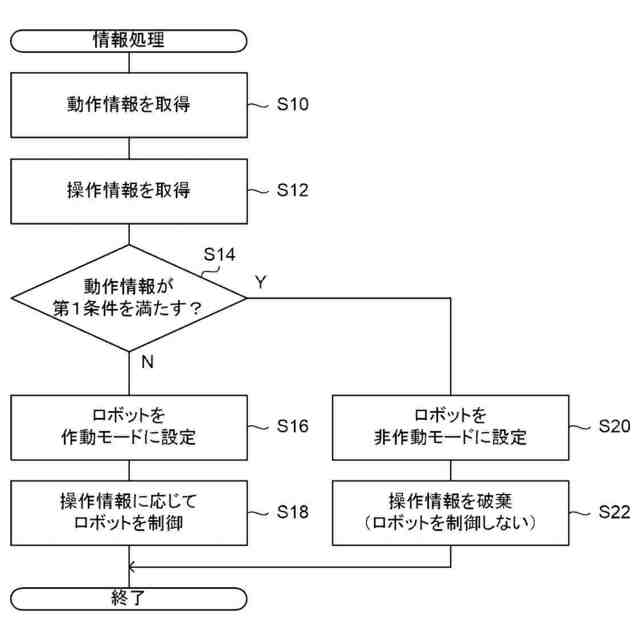
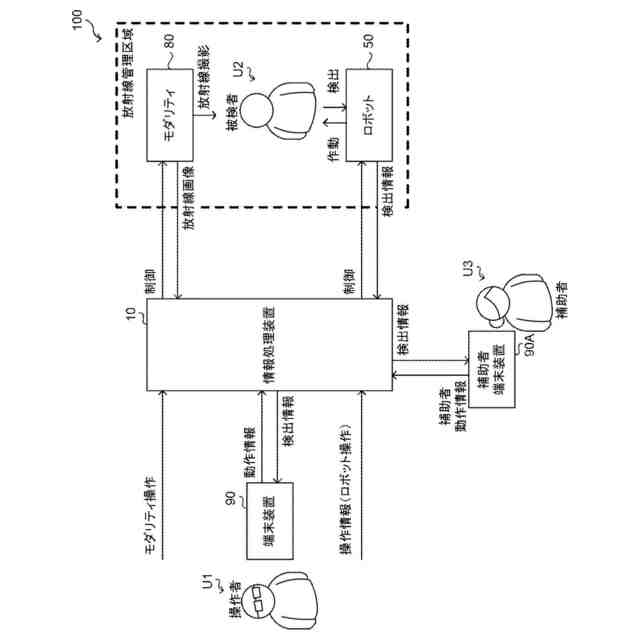
【解決手段】情報処理システム100は、少なくとも1つのプロセッサを備え、プロセッサは、ロボット50の可動部を操作する操作者U1の動作を示す動作情報を取得し、動作情報が、予め定められた第1条件を満たす場合に、可動部を作動可能な状態とする作動モードから、可動部を作動不能な状態とする非作動モードに切り替えるよう、ロボット50を制御する。
【選択図】図1
特許請求の範囲
【請求項1】
少なくとも1つのプロセッサを備え、
前記プロセッサは、
ロボットの可動部を操作する操作者の動作を示す動作情報を取得し、
前記動作情報が、予め定められた第1条件を満たす場合に、前記可動部を作動可能な状態とする作動モードから、前記可動部を作動不能な状態とする非作動モードに切り替えるよう、前記ロボットを制御する
情報処理システム。
続きを表示(約 1,200 文字)
【請求項2】
前記プロセッサは、
前記操作者によって入力される前記可動部に対する操作情報を取得し、
前記作動モードの場合に、前記操作情報に応じた動作をするよう前記ロボットを制御し、
前記非作動モードの場合に、前記操作情報を破棄する
請求項1に記載の情報処理システム。
【請求項3】
前記プロセッサは、
前記作動モードの場合に、前記動作情報に連動して前記可動部が作動するような前記操作情報を生成する
請求項2に記載の情報処理システム。
【請求項4】
前記プロセッサは、
前記動作情報が、前記第1条件として、前記操作者が予め定められた領域に侵入したことを示す場合に、前記作動モードから前記非作動モードに切り替えるよう前記ロボットを制御する
請求項1に記載の情報処理システム。
【請求項5】
前記予め定められた領域は、前記ロボットから予め定められた範囲内の領域である
請求項4に記載の情報処理システム。
【請求項6】
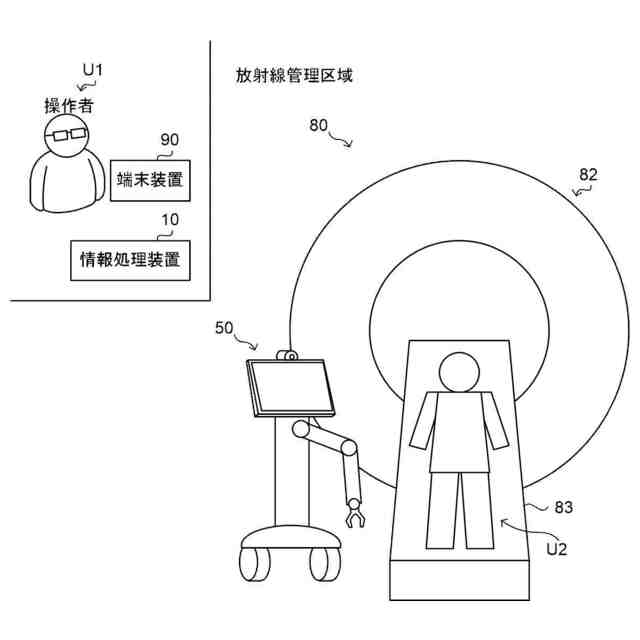
前記予め定められた領域は、放射線管理区域、高磁場管理区域、バイオハザード管理区域、無菌室、集中治療室及びクリーンルームのうち少なくとも1つであり、
前記ロボットは、前記予め定められた領域内で作動する
請求項4に記載の情報処理システム。
【請求項7】
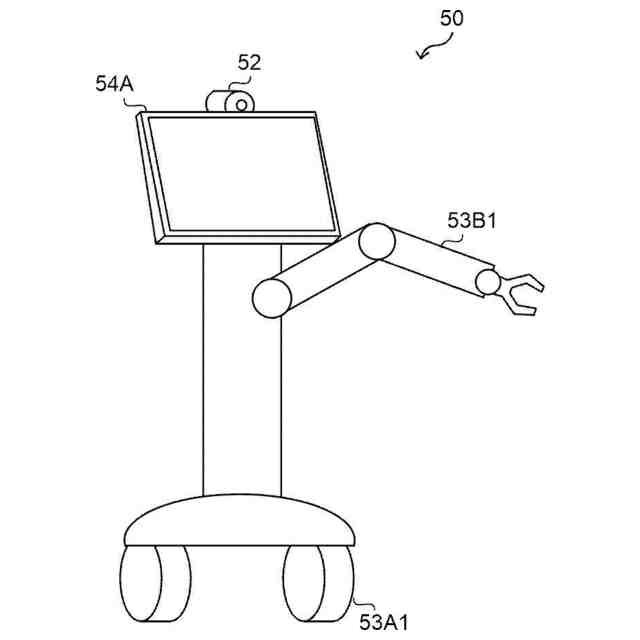
前記ロボットは、センサ、カメラ及びマイクのうち少なくとも1つの検出部を備え、
前記プロセッサは、
前記ロボットの前記検出部によって取得された検出情報を取得し、
前記検出情報を、少なくとも1つの出力装置に出力する
請求項1に記載の情報処理システム。
【請求項8】
前記プロセッサは、
前記動作情報が、予め定められた第2条件を満たす場合に、前記検出情報の前記出力装置への出力を停止する
請求項7に記載の情報処理システム。
【請求項9】
前記プロセッサは、
前記操作者以外の補助者の動作を示す補助者動作情報を取得し、
前記補助者動作情報が、予め定められた第3条件を満たす場合に、前記作動モードから、前記非作動モードに切り替えるよう、前記ロボットを制御する
請求項1に記載の情報処理システム。
【請求項10】
前記プロセッサは、
前記検出情報を、前記操作者に予め対応付けられた第1出力装置と、前記操作者以外の補助者に予め対応付けられた第2出力装置と、に出力し、
前記補助者の動作を示す補助者動作情報を取得し、
前記補助者動作情報が、予め定められた第4条件を満たす場合に、前記検出情報の前記第2出力装置への出力を停止する
請求項7に記載の情報処理システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示の技術は、情報処理システム、情報処理方法及び情報処理プログラムに関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
従来、仮想現実(VR:Virtual Reality)、拡張現実(AR:Augmented Reality)及び複合現実(MR:Mixed Reality)に関する技術の発展に伴い、ロボットを遠隔地から人が操作するテレイグジスタンスという手法が開発されている。テレイグジスタンスは、ロボットに付属のカメラ及びマイク等により検出されるロボットの周辺情報を操作者に知覚させながら、操作者による操作を受け付けるものである。操作者は、自身がロボットと同じ環境に存在するかのように感じながら、ロボットを操作できる。
【0003】
例えば、特許文献1には、ロボットアームとは離れた位置にいる操作者が、ロボットアームに設けられたカメラによる映像を確認しながら、非接触アクションを行うことによって、ロボットアームを操作することが開示されている。
【先行技術文献】
【特許文献】
【0004】
国際公開WO2017/033367号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
近年、テレイグジスタンスを応用して、操作者が出入り又は滞在することに制限のある領域(以下、制限領域と称する)において、人に代わってロボットに作業をさせるような技術が求められている。制限領域としては、例えば、放射線管理区域、高磁場管理区域、バイオハザード管理区域、無菌室、集中治療室及びクリーンルーム等が挙げられる。
【0006】
一方で、制限領域には人が全く出入りしないわけではなく、必要に応じてロボットの操作者を含む人が出入りすることも考えられる。制限領域に出入りする人にとっては、ロボットが予期せぬ動きをすると、人が行う作業の妨げとなったり、ロボットと人が衝突してしまったりする可能性がある。そこで、制限領域に出入りする人にとって、ロボットが予期せぬ動きをしないようにする技術が望まれている。
【0007】
本開示は、ロボットを適切に操作できる情報処理システム、情報処理方法及び情報処理プログラムを提供する。
【課題を解決するための手段】
【0008】
本開示の第1態様は、情報処理システムであって、少なくとも1つのプロセッサを備え、プロセッサは、ロボットの可動部を操作する操作者の動作を示す動作情報を取得し、動作情報が、予め定められた第1条件を満たす場合に、可動部を作動可能な状態とする作動モードから、可動部を作動不能な状態とする非作動モードに切り替えるよう、ロボットを制御する。
【0009】
上記態様において、プロセッサは、操作者によって入力される可動部に対する操作情報を取得し、作動モードの場合に、操作情報に応じた動作をするようロボットを制御し、非作動モードの場合に、操作情報を破棄してもよい。
【0010】
上記態様において、プロセッサは、作動モードの場合に、動作情報に連動して可動部が作動するような操作情報を生成してもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
他の特許を見る
 特許ウォッチ
特許ウォッチ