TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025044537
公報種別
公開特許公報(A)
公開日
2025-04-02
出願番号
2023152159
出願日
2023-09-20
発明の名称
車両の制御装置
出願人
本田技研工業株式会社
代理人
弁理士法人航栄事務所
主分類
B60W
30/16 20200101AFI20250326BHJP(車両一般)
要約
【課題】駆動力の制御を適切に行って運転者の満足度向上を図ること。
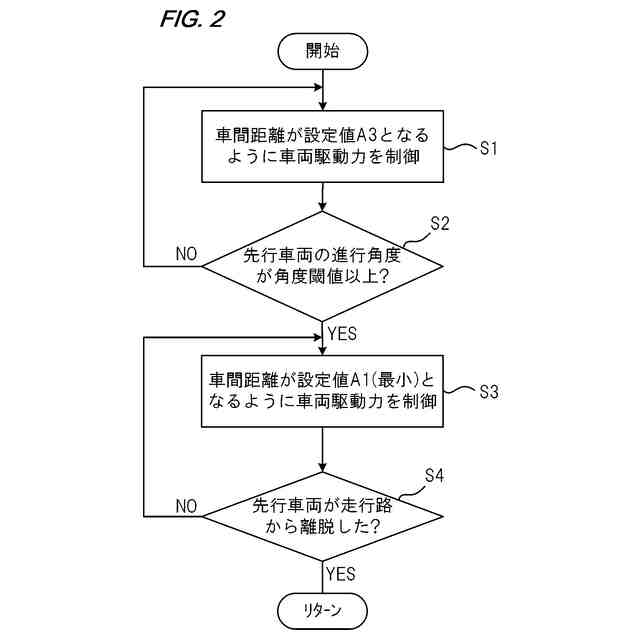
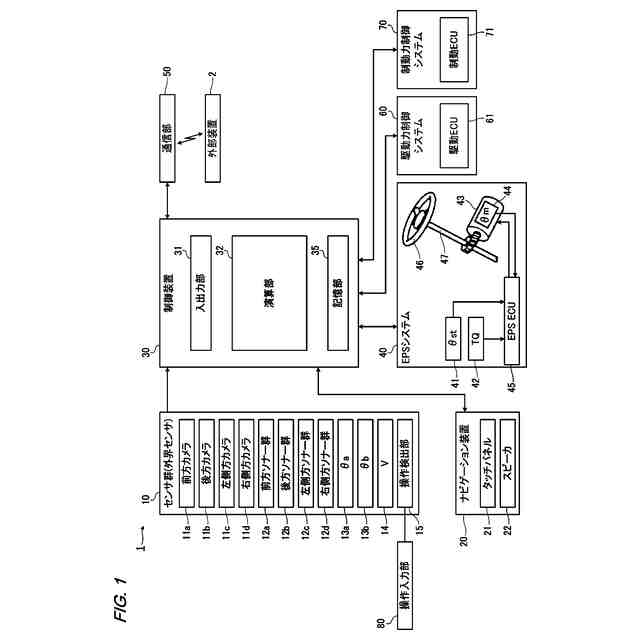
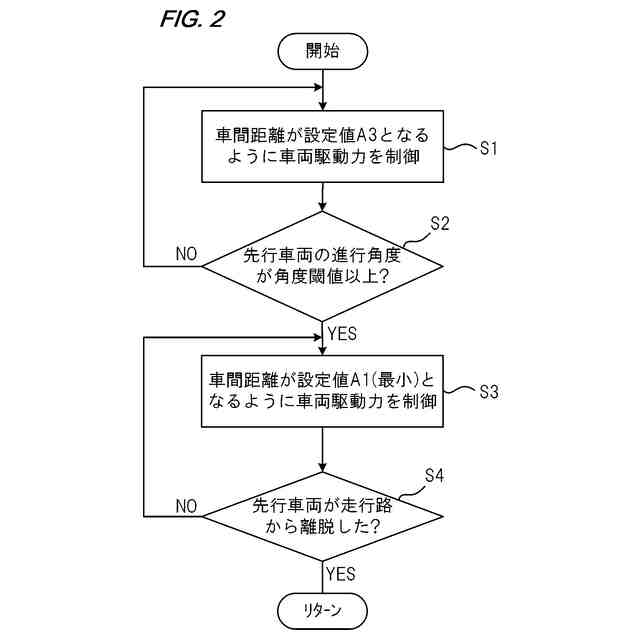
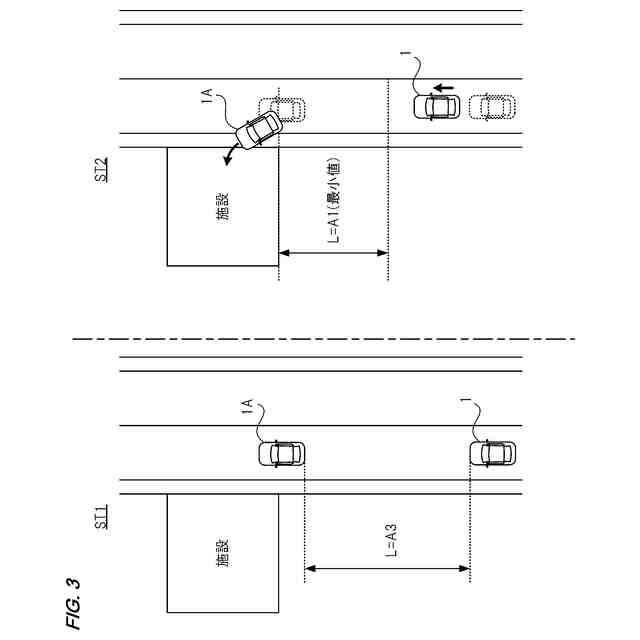
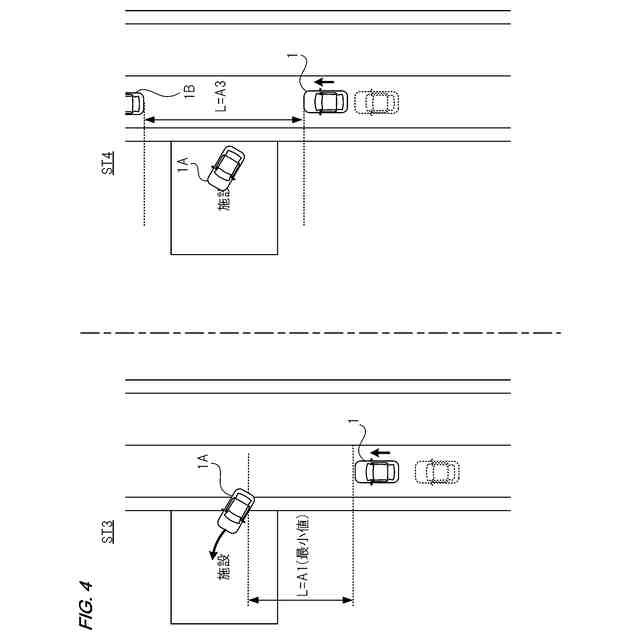
【解決手段】車両1の制御装置30は、車両1の追従対象の先行車両1Aと車両1との車間距離Lが複数の設定値のうちのいずれかとなるように車両1の駆動力を制御する演算部32を備え、演算部32は、車両1の進行方向に対する先行車両1Aの進行角度を取得し、その進行角度が閾値以上である場合には、車間距離Lが上記複数の設定値のうちの最小値(設定値A1)となるように制御する。
【選択図】図2
特許請求の範囲
【請求項1】
車両の制御装置であって、
プロセッサを備え、
前記プロセッサは、
前記車両の進行方向に対する前記車両の追従対象の先行車両の進行角度を取得し、
前記進行角度に基づいて、前記車両と前記先行車両との車間距離を制御する制御装置。
続きを表示(約 1,200 文字)
【請求項2】
請求項1に記載の制御装置であって、
前記プロセッサは、
前記進行角度が閾値以上である場合には、前記車間距離が、前記進行角度が閾値未満である場合よりも小さくなるように制御する制御装置。
【請求項3】
請求項2に記載の制御装置であって、
前記プロセッサは、
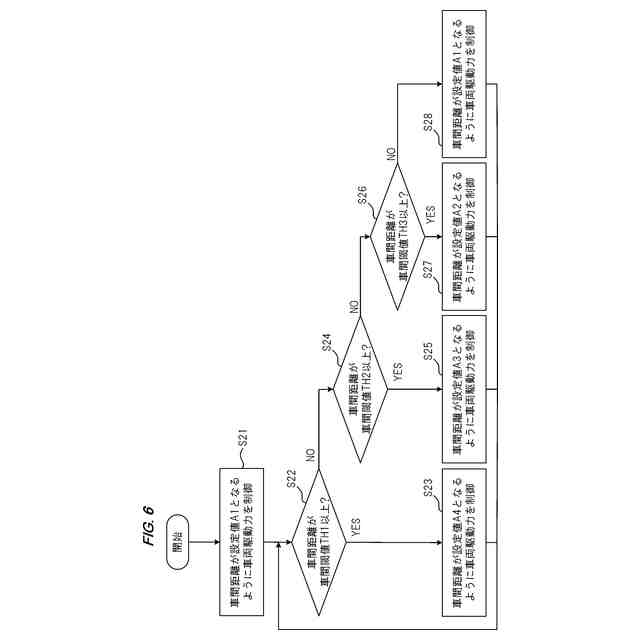
前記車間距離が複数の設定値のうちのいずれかとなるように前記車両の駆動力を制御し、
前記進行角度が閾値以上である場合には、前記車間距離が、前記進行角度が閾値未満である場合に設定されている前記設定値よりも小さくなるように制御する制御装置。
【請求項4】
請求項3に記載の制御装置であって、
前記プロセッサは、
前記進行角度が閾値以上である場合には、前記車間距離が前記複数の設定値のうちの最小値となるように制御する制御装置。
【請求項5】
請求項4に記載の制御装置であって、
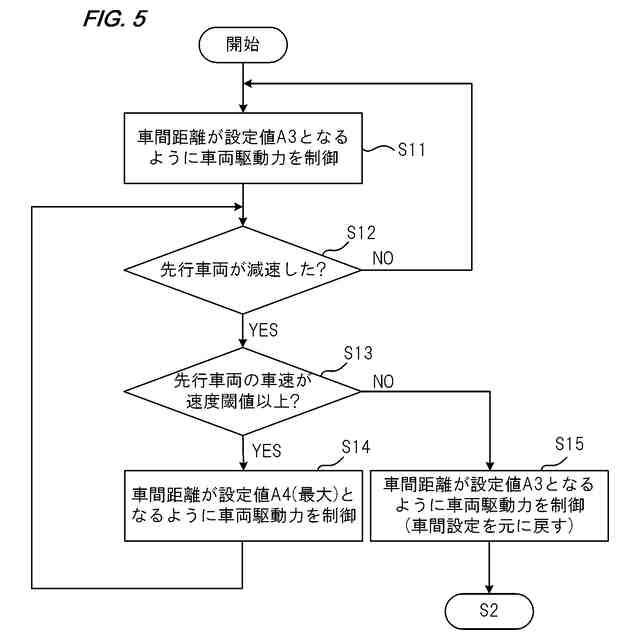
前記プロセッサは、前記先行車両の減速を検出した場合には、前記車間距離が前記複数の設定値のうちの最大値となるように制御する制御装置。
【請求項6】
請求項5に記載の制御装置であって、
前記プロセッサは、前記先行車両の減速を検出し且つ前記先行車両の車速が車速閾値以上の場合には、前記車間距離が前記最大値となるように制御し、前記先行車両の減速を検出し且つ前記先行車両の車速が前記車速閾値未満の場合には、前記車間距離が予め選択されている前記設定値となるように制御する制御装置。
【請求項7】
請求項4に記載の制御装置であって、
前記プロセッサは、前記車両よりも低速で走行する先行車両を追従対象として認識した場合には、当該先行車両と前記車両との距離を取得し、前記距離に基づいて前記複数の設定値のいずれかを選択し、前記車間距離が当該選択した設定値となるように制御する制御装置。
【請求項8】
請求項3から7のいずれか1項に記載の制御装置であって、
前記プロセッサは、前記車両が高速道を走行中又は前記車両の車速が所定値以上である場合には、前記車間距離の制御値を予め選択された前記設定値に保持する制御装置。
【請求項9】
請求項1から7のいずれか1項に記載の制御装置であって、
前記進行角度は、前記車両の進行方向と前記先行車両の進行方向とのなす角度、又は、走行路の車線に対する前記先行車両の進行方向の角度である制御装置。
【請求項10】
請求項4から7のいずれか1項に記載の制御装置であって、
前記プロセッサは、前記先行車両の方向指示器の作動状態を判定可能であり、前記方向指示器が点滅している状態が所定時間継続している場合には、前記車間距離が前記最小値となるように制御する制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両の制御装置に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
近年、交通参加者の中でも脆弱な立場にある人々にも配慮した持続可能な輸送システムへのアクセスを提供する取り組みが活発化している。この実現に向けて運転支援技術に関する研究開発を通して交通の安全性や利便性をより一層改善する研究開発に注力している。運転支援技術として、例えば特許文献1-4に記載のものがある。
【0003】
特許文献1には、先行車両から発せられる隣接レーンへのレーンチェンジの意思表示を検知し、且つ、隣接レーンに向けて前記先行車両が離脱したことを検知した場合、自車両を前記先行車両に追従走行させるための加速抑制を解除する自動運転方法が記載されている。
【0004】
特許文献2には、先行車までの車間距離を検出する車間距離検出手段と、自車速を検出する自車速検出手段と、先行車までの車間距離が目標車間距離となるように先行車に追従走行を行う追従制御手段とを備え、停車するまで先行車に追従走行する第1追従制御モードと、自車速が0より大きい所定の低車速に低下するまで先行車に追従走行する第2追従制御モードとを備える走行制御装置が記載されている。
【0005】
特許文献3には、先行車両に対して設定の車間距離を維持して走行する機能を有する車両の運転制御装置であって、自車両が走行する車線の隣車線を走行する他車両のうち、該自車両と前記先行車両との車間に割り込める位置関係にある対象車両を検出し、前記対象車両による割り込みの可能性がある警戒状況を検出した場合に、前記車間距離を変更する運転制御装置が記載されている。
【0006】
特許文献4には、自車両の周辺状況を認識する認識部と、前記認識部による認識結果に基づいて前記自車両の加減速および操舵を制御する運転制御部と、を備え、前記運転制御部は、前記自車両が交差点を通過する場合において、前記自車両の進行する予定の方向が対向車両の進路を跨いで前記交差点を通過する方向であり且つ前記自車両が走行する道路に中央分離帯が存在する場合、前記自車両の前方を走行し前記予定の方向への進行意図が推定される前走車両の挙動に応じた走行制御を行うことで前記前走車両に前記自車両を追従させて前記交差点を通過させる、車両制御装置が記載されている。
【先行技術文献】
【特許文献】
【0007】
特開2023-010320号公報
特開2006-182259号公報
特開2016-147556号公報
特開2019-131077号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
車両の駆動力をシステム側で制御する場合には、運転者に対して違和感を与えずに制御を行うことが求められる。
【0009】
本開示は、駆動力の制御を適切に行って運転者の満足度向上を図ることを目的としている。そして、延いては持続可能な輸送システムの発展に寄与するものである。
【課題を解決するための手段】
【0010】
本開示の一態様の車両の制御装置は、前記車両の追従対象の先行車両と前記車両との車間距離が複数の設定値のうちのいずれかとなるように前記車両の駆動力を制御するプロセッサを備え、前記プロセッサは、前記車両の進行方向に対する前記先行車両の進行角度を取得し、前記進行角度が閾値以上である場合には、前記車間距離が前記複数の設定値のうちの最小値となるように制御するものである。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
他の特許を見る
 特許ウォッチ
特許ウォッチ