TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025043366
公報種別
公開特許公報(A)
公開日
2025-03-31
出願番号
2024023150
出願日
2024-02-19
発明の名称
反射行列ベースの多重散乱追跡アルゴリズムを用いて散乱媒質内の対象イメージを補正及び復元するイメージング装置及び方法
出願人
高麗大学校産学協力団
,
KOREA UNIVERSITY RESEARCH AND BUSINESS FOUNDATION
,
インスティチュート フォー ベーシック サイエンス
,
INSTITUTE FOR BASIC SCIENCE
代理人
弁理士法人エビス国際特許事務所
主分類
G02B
21/00 20060101AFI20250324BHJP(光学)
要約
【課題】時間分解光源を使用して得た時間分解反射行列を用いて多重散乱軌跡を追跡した後、これを補正し、生体組織などの散乱媒質の深い場所に位置する内部の対象イメージを補正及び復元するイメージング装置及び方法を提供する。
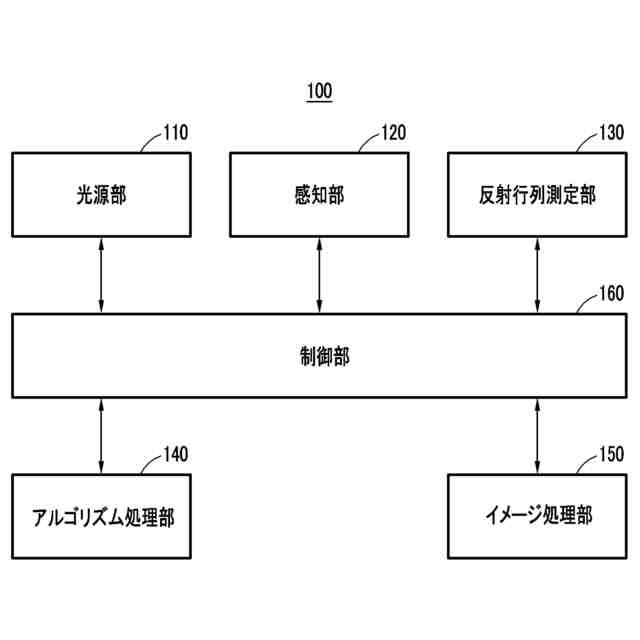
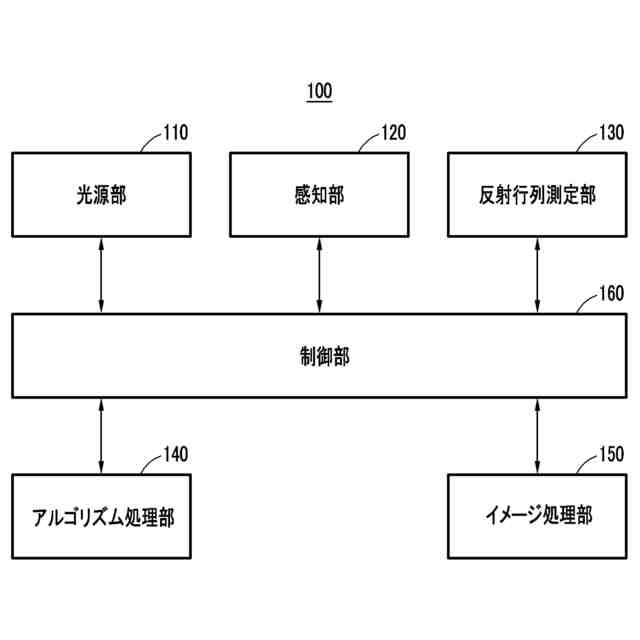
【解決手段】光を対象物体に入射する光源部110;対象物体から多重散乱されて戻ってくる光を感知する感知部120;戻ってくる光に基づいて多重散乱成分に基づいた多重散乱軌跡が反映された時間分解反射行列を測定する反射行列測定部130;多重散乱追跡アルゴリズムによって入射透過行列及び反射透過行列を獲得し、それらの逆行列を測定された時間分解反射行列に反映することによって物体反射行列を獲得するアルゴリズム処理部140;及び獲得された物体反射行列に基づいて多重散乱歪曲が補正されたイメージを獲得するイメージ処理部150;を含んでイメージング装置100を構成する。
【選択図】図1
特許請求の範囲
【請求項1】
散乱媒質と前記散乱媒質内の多重散乱成分を透過した光を対象物体に入射する光源部;
前記入射後、前記対象物体から前記多重散乱成分を透過し、反射されて戻ってくる光を感知する感知部;
前記戻ってくる光に基づいて前記多重散乱成分に基づいた多重散乱軌跡が反映された時間分解反射行列を測定する反射行列測定部;
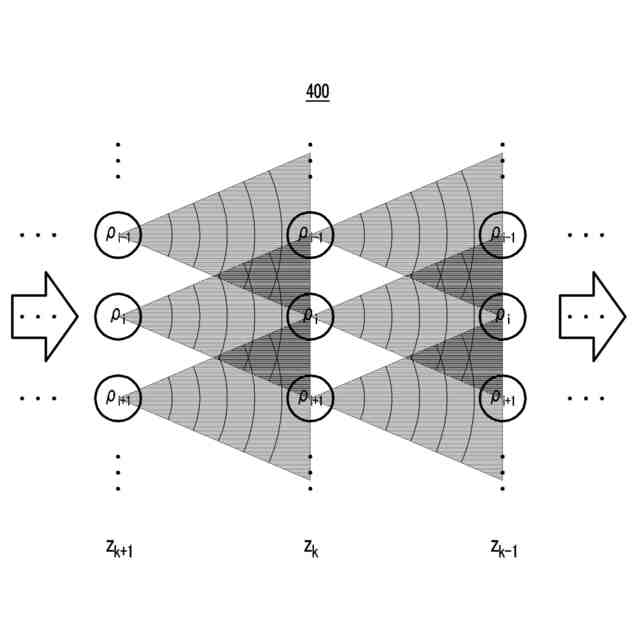
多重散乱追跡アルゴリズムによって前記散乱媒質から近似した複数の位相平面に対して数値反復的にアクセスを行い、入射透過行列及び反射透過行列を獲得し、前記獲得された入射透過行列及び前記獲得された反射透過行列の逆行列を前記測定された時間分解反射行列に反映することによって物体反射行列を獲得するアルゴリズム処理部;及び
前記獲得された物体反射行列に基づいて前記多重散乱軌跡による多重散乱歪曲が補正されたイメージを獲得するイメージ処理部;を含むことを特徴とする、イメージング装置。
続きを表示(約 1,800 文字)
【請求項2】
前記アルゴリズム処理部は、前記多重散乱追跡アルゴリズムに基づいて前記時間分解反射行列の入力又は出力端にk番目の位相平面までの距離に該当する空間伝播行列(P
k
)を掛けることによって、それぞれの位相平面に対して数値反復的にアクセスを行い、前記k番目に該当する複数の入射透過行列及び複数の反射透過行列を獲得することを特徴とする、請求項1に記載のイメージング装置。
【請求項3】
前記アルゴリズム処理部は、前記多重散乱追跡アルゴリズムに基づいて前記複数の位相平面のうち特定の位相平面に対して互いに異なる二つの点に光を集束させた場合を考慮した上で、二つの地点の位相遅延値の差を獲得し、前記獲得した差を前記特定の位相平面に対して獲得される入射透過行列と反射透過行列に適用することを特徴とする、請求項1に記載のイメージング装置。
【請求項4】
前記複数の位相平面のそれぞれは、前記散乱媒質内部の多重散乱成分と関連して透過行列を算出し、前記算出された透過行列に基づいた第1位相平面が設計され、前記設計された第1位相平面上に前記算出された透過行列の逆透過行列に基づいた第2位相平面が設計されることによって、前記散乱媒質の内部に仮想的に位置したり、前記散乱媒質上に位置することを特徴とする、請求項1に記載のイメージング装置。
【請求項5】
前記複数の位相平面の位置は、前記対象物体からの距離を変更しながら前記多重散乱追跡アルゴリズムを適用することによる電場の強度を測定した後、前記測定された電場の強度が基準値より大きい位置として決定されることを特徴とする、請求項1に記載のイメージング装置。
【請求項6】
前記複数の位相平面の数は、位相平面の数を変更しながら前記多重散乱追跡アルゴリズムを適用することによる電場の強度を測定した後、前記変更される数による計算時間を共に考慮して決定されることを特徴とする、請求項1に記載のイメージング装置。
【請求項7】
前記反射行列測定部は、各行列成分を前記対象物体の面上の各位置に集中した光とし、入力基準の結果、反射された光における、物体面の共役イメージ平面に置かれたカメラの各位置において出力基準で測定した電場の強度及び位相値として決定された前記時間分解反射行列を測定することを特徴とする、請求項1に記載のイメージング装置。
【請求項8】
前記光源部は、前記対象物体に点照明で前記光を入射し、前記点照明の位置を変更することによって前記対象物体上の入射位置を変更し、
前記感知部は、前記変更された入射位置によって変更された感知ピクセルを感知することを特徴とする、請求項1に記載のイメージング装置。
【請求項9】
前記アルゴリズム処理部は、前記多重散乱追跡アルゴリズムによって前記散乱媒質の前記多重散乱成分に対して前記複数の位相平面と前記複数の位相平面のそれぞれを構成する複数の地点に対する位相値と関連した入射透過行列と反射透過行列のそれぞれに対する各逆行列を算出し、前記算出された各逆行列を前記時間分解反射行列に反映することによって前記対象物体に対する物体反射行列を獲得することを特徴とする、請求項1に記載のイメージング装置。
【請求項10】
光源部において、散乱媒質と前記散乱媒質内の多重散乱成分を透過した光を対象物体に入射する段階;
感知部において、前記入射後、前記対象物体から前記多重散乱成分を透過し、反射されて戻ってくる光を感知する段階;
反射行列測定部において、前記戻ってくる光に基づいて前記多重散乱成分に基づいた多重散乱軌跡が反映された時間分解反射行列を測定する段階;
アルゴリズム処理部において、多重散乱追跡アルゴリズムによって前記散乱媒質から近似した複数の位相平面に対して数値反復的にアクセスを行い、入射透過行列及び反射透過行列を獲得し、前記獲得された入射透過行列及び前記獲得された反射透過行列の逆行列を前記測定された時間分解反射行列に反映することによって物体反射行列を獲得する段階;及び
イメージ処理部において、前記獲得された物体反射行列に基づいて前記多重散乱軌跡による多重散乱歪曲が補正されたイメージを獲得する段階;を含むことを特徴とする、イメージング方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
[関連出願との相互参照]
本出願は、2023年09月18日付の韓国特許出願第10-2023-0124023号に基づく優先権の利益を主張し、当該韓国特許出願の文献に開示された全ての内容は本明細書の一部として組み込まれる。
続きを表示(約 1,000 文字)
【0002】
本発明は、反射行列ベースの多重散乱追跡アルゴリズムを用いて散乱媒質内の対象イメージを補正及び復元するイメージング装置及び方法に関し、より具体的には、時間分解光源を使用するイメージング装置から得た時間分解反射行列を用いて多重散乱軌跡を追跡した後、これを補正し、生体組織などの散乱媒質の深い場所に位置する内部の対象物体に対するイメージを補正及び復元する技術に関する。
【背景技術】
【0003】
生体組織の高深度に行くほど、組織の構造が与える多重散乱によってイメージング可能な深さが制限される。
【0004】
これを克服するために、時間分解反射行列を測定することによって多重散乱を抑制する反射行列顕微鏡(Reflection matrix microscopy)が開発された。
【0005】
この方式では、散乱媒質の内部に伝播される光の散乱成分のうち、多重散乱を経験せずに伝播される弾道波(Ballistic wave)のみを選択的に用いる方法が考慮され得る。
【0006】
一方、このような弾道波に歪曲を加える散乱媒質の収差を測定及び補正するCLASS(Closed loop accumulation of single scattering)方法が開発された。
【0007】
反射行列顕微鏡は、散乱媒質の反射行列を測定し、散乱媒質に入射される光の入射角度を変えながら、それぞれの入射ビーム(光)に対応する反射された光の電場の強度及び位相を光の干渉現象を用いて測定する。
【0008】
測定された複素位相イメージは、入力基準(basis)に対する出力基準の行列形態で散乱媒質の反射行列を再構成する。
【0009】
この反射行列から散乱媒質内部の物体イメージを獲得するようになり、入力基準が入射ビーム焦点の位置である場合、共焦点顕微鏡の方式で物体イメージを獲得し、入射ビームの入射角度を基準として用いた場合、CASS(Collective accumulation of single scattering)顕微鏡方式で物体イメージを再構成する。
【0010】
この過程で多重散乱を抑制し、弾道波のみを選択的に用いるようになる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
他の特許を見る
 特許ウォッチ
特許ウォッチ