TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025042814
公報種別
公開特許公報(A)
公開日
2025-03-28
出願番号
2023149961
出願日
2023-09-15
発明の名称
ロボット、配置機構、及び射出成形機
出願人
セイコーエプソン株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
B22F
3/02 20060101AFI20250321BHJP(鋳造;粉末冶金)
要約
【課題】簡易な構造によって複数の成形品同士の間隔を変更可能なロボットを提供すること。
【解決手段】予め決められた第1方向に延伸する第1軌道体と、前記第1軌道体に対して摺動可能に設けられる第1摺動部と、第1軌道体に対して摺動可能に設けられる第2摺動部とが設けられた第A基台と、第1摺動部に設けられ、第1成形品を保持する第1保持部と、第2摺動部に設けられ、第2成形品を保持する第2保持部と、第B基台と、を備え、第B基台には、第A基台に対する第B基台の相対的な位置が第A位置である場合、第1軌道体上における第1保持部と第2保持部との間隔が第1間隔となり、第A基台に対する第B基台の相対的な位置が第B位置である場合、第1軌道体上における第1保持部と第2保持部との間隔が第1間隔よりも短い第2間隔になるように、第1保持部と第2保持部との少なくとも一方をカム動作させる溝が形成されている、ロボット。
【選択図】図16
特許請求の範囲
【請求項1】
予め決められた第1方向に延伸する第1軌道体と、前記第1軌道体に対して摺動可能に設けられる第1摺動部と、前記第1軌道体に対して摺動可能に設けられる第2摺動部とが設けられた第A基台と、
前記第1摺動部に設けられ、第1成形品を保持する第1保持部と、
前記第2摺動部に設けられ、第2成形品を保持する第2保持部と、
第B基台と、
を備え、
前記第B基台には、前記第A基台に対する前記第B基台の相対的な位置が第A位置である場合、前記第1軌道体上における前記第1保持部と前記第2保持部との間隔が第1間隔となり、前記第A基台に対する前記第B基台の相対的な位置が第B位置である場合、前記第1軌道体上における前記第1保持部と前記第2保持部との間隔が前記第1間隔よりも短い第2間隔になるように、前記第1保持部と前記第2保持部との少なくとも一方をカム動作させる溝が形成されている、
ロボット。
続きを表示(約 2,900 文字)
【請求項2】
前記第A基台に対する前記第B基台の相対的な位置を、前記第A位置と前記第B位置との間で変化させる第A基台移動部を備える、
請求項1に記載のロボット。
【請求項3】
前記第B基台には、前記第1保持部と前記第2保持部との少なくとも一方をカム動作させる溝として、前記第1保持部をカム動作させる第1溝と、前記第2保持部をカム動作させる第2溝とが形成されている、
請求項1に記載のロボット。
【請求項4】
前記第1保持部は、前記第1保持部の先端に設けられ、前記第1成形品を保持する第1先端部と、前記第1溝に挿通される第1挿通部位とを有し、
前記第2保持部は、前記第2保持部の先端に設けられ、前記第2成形品を保持する第2先端部と、前記第2溝に挿通される第2挿通部位とを有し、
前記第1軌道体上における前記第1保持部と前記第2保持部との間隔は、前記第1先端部と前記第2先端部との間隔のことであり、
前記第A基台に対する前記第B基台の相対的な位置が前記第A位置と前記第B位置との間に含まれるいずれの位置であっても、前記第1先端部と前記第2先端部との間隔は、前記第1挿通部位と前記第2挿通部位との間隔よりも狭い、
請求項3に記載のロボット。
【請求項5】
前記第1保持部には、前記第1保持部に対する前記第1先端部の相対的な位置を調整する第1位置調整機構が設けられており、
前記第2保持部には、前記第2保持部に対する前記第2先端部の相対的な位置を調整する第2位置調整機構が設けられている、
請求項4に記載のロボット。
【請求項6】
前記第1保持部の形状と、前記第2保持部の形状とは、前記第1挿通部位と前記第2挿通部位との中点を通り、前記第1方向と直交する仮想的な面について互いに面対称な形状である、
請求項4に記載のロボット。
【請求項7】
前記第B基台は、前記第1方向と直交する方向に向かって、前記第A基台に対して相対的に移動する、
請求項1に記載のロボット。
【請求項8】
第3成形品を保持する第3保持部と、
第4成形品を保持する第4保持部と、
を更に備え、
前記第A基台は、前記第1軌道体に対して摺動可能に設けられる第3摺動部と、前記第1軌道体に対して摺動可能に設けられる第4摺動部とが更に設けられており、
前記第1摺動部と、前記第2摺動部と、前記第3摺動部と、前記第4摺動部とは、前記第1軌道体上において、前記第1方向に向かって前記第3摺動部、前記第1摺動部、前記第2摺動部、前記第4摺動部の順に並んでおり、
前記第3摺動部には、前記第3保持部が設けられており、
前記第4摺動部には、前記第4保持部が設けられており、
前記第B基台には、前記第A基台に対する前記第B基台の相対的な位置が前記第A位置である場合、前記第1軌道体上における前記第3保持部と前記第4保持部との間隔が第3間隔となり、前記第A基台に対する前記第B基台の相対的な位置が前記第B位置である場合、前記第1軌道体上における前記第3保持部と前記第4保持部との間隔が前記第3間隔よりも短い第4間隔になるように、前記第3保持部と前記第4保持部との少なくとも一方をカム動作させる溝が形成されており、
前記第3間隔は、前記第1間隔よりも長く、
前記第4間隔は、前記第2間隔よりも長い、
請求項1に記載のロボット。
【請求項9】
前記第A基台に対する前記第B基台の相対的な位置が前記第A位置である場合において前記第1保持部により保持される前記第1成形品と、前記第A基台に対する前記第B基台の相対的な位置が前記第A位置である場合において前記第3保持部により保持される前記第3成形品との間隔は、前記第A基台に対する前記第B基台の相対的な位置が前記第A位置である場合において前記第1保持部により保持される前記第1成形品と、前記第A基台に対する前記第B基台の相対的な位置が前記第A位置である場合において前記第2保持部により保持される前記第2成形品との間隔よりも狭く、
前記第A基台に対する前記第B基台の相対的な位置が前記第B位置である場合において前記第1保持部により保持される前記第1成形品と、前記第A基台に対する前記第B基台の相対的な位置が前記第B位置である場合において前記第3保持部により保持される前記第3成形品との間隔は、前記第A基台に対する前記第B基台の相対的な位置が前記第B位置である場合において前記第1保持部により保持される前記第1成形品と、前記第A基台に対する前記第B基台の相対的な位置が前記第B位置である場合において前記第2保持部により保持される前記第2成形品との間隔と同じ間隔である、
請求項8に記載のロボット。
【請求項10】
前記第1方向に延伸し、前記第1軌道体と平行に並ぶ第2軌道体と、前記第2軌道体に対して摺動可能に設けられる第5摺動部と、前記第2軌道体に対して摺動可能に設けられる第6摺動部と、前記第2軌道体に対して摺動可能に設けられる第7摺動部と、前記第2軌道体に対して摺動可能に設けられる第8摺動部とが設けられた第C基台と、
前記第5摺動部に設けられ、第5成形品を保持する第5保持部と、
前記第6摺動部に設けられ、第6成形品を保持する第6保持部と、
前記第7摺動部に設けられ、第7成形品を保持する第7保持部と、
前記第8摺動部に設けられ、第8成形品を保持する第8保持部と、
第D基台と、
を更に備え、
前記第D基台には、前記第C基台に対する前記第D基台の相対的な位置が第C位置である場合、前記第2軌道体上における前記第5保持部と前記第6保持部との間隔が第5間隔となり、前記第C基台に対する前記第D基台の相対的な位置が第D位置である場合、前記第2軌道体上における前記第5保持部と前記第6保持部との間隔が前記第5間隔よりも短い第6間隔になるように、前記第5保持部と前記第6保持部との少なくとも一方をカム動作させる溝と、前記第C基台に対する前記第D基台の相対的な位置が前記第C位置である場合、前記第2軌道体上における前記第7保持部と前記第8保持部との間隔が第7間隔となり、前記第C基台に対する前記第D基台の相対的な位置が前記第D位置である場合、前記第2軌道体上における前記第7保持部と前記第8保持部との間隔が前記第7間隔よりも短い第8間隔になるように、前記第7保持部と前記第8保持部との少なくとも一方をカム動作させる溝とが形成されており、
前記第7間隔は、前記第5間隔よりも長く、
前記第8間隔は、前記第6間隔よりも長い、
請求項8に記載のロボット。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
この開示は、ロボット、配置機構、及び射出成形機に関する。
続きを表示(約 2,600 文字)
【背景技術】
【0002】
金属粉末を含む成形材料を用いた射出成形機により成形された複数の成形品を所望の位置へ配置する技術についての研究、開発が行われている。
【0003】
これに関し、載置された複数の成形品同士の間隔を、円筒カムを用いることによって変更可能な配置機構が知られている(特許文献1参照)。
【先行技術文献】
【特許文献】
【0004】
特開2004-039706号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1に記載されたような配置機構は、円筒カムを用いることによって大型化することになり、更に、回転角度の制御も必要となるため、複雑な構造となっている。これは、配置機構の製造コストの増大を招くため、好ましいことではない。
【課題を解決するための手段】
【0006】
上記課題を解決するために本開示の一態様は、予め決められた第1方向に延伸する第1軌道体と、前記第1軌道体に対して摺動可能に設けられる第1摺動部と、前記第1軌道体に対して摺動可能に設けられる第2摺動部とが設けられた第A基台と、前記第1摺動部に設けられ、第1成形品を保持する第1保持部と、前記第2摺動部に設けられ、第2成形品を保持する第2保持部と、第B基台と、を備え、前記第B基台には、前記第A基台に対する前記第B基台の相対的な位置が第A位置である場合、前記第1軌道体上における前記第1保持部と前記第2保持部との間隔が第1間隔となり、前記第A基台に対する前記第B基台の相対的な位置が第B位置である場合、前記第1軌道体上における前記第1保持部と前記第2保持部との間隔が前記第1間隔よりも短い第2間隔になるように、前記第1保持部と前記第2保持部との少なくとも一方をカム動作させる溝が形成されている、ロボットである。
【0007】
また、上記課題を解決するために本開示の一態様は、予め決められた第1方向に延伸する第1軌道体と、前記第1軌道体に対して摺動可能に設けられる第1摺動部と、前記第1軌道体に対して摺動可能に設けられる第2摺動部とが設けられた第A基台と、前記第1摺動部に設けられ、第1成形品が載置される第1載置部と、前記第2摺動部に設けられ、第2成形品が載置される第2載置部と、第B基台と、を備え、前記第B基台には、前記第A基台に対する前記第B基台の相対的な位置が第A位置である場合、前記第1軌道体上における前記第1載置部と前記第2載置部との間隔が第1間隔となり、前記第A基台に対する前記第B基台の相対的な位置が第B位置である場合、前記第1軌道体上における前記第1載置部と前記第2載置部との間隔が前記第1間隔よりも短い第2間隔になるように、前記第1載置部と前記第2載置部との少なくとも一方をカム動作させる溝が形成されている、配置機構である。
【0008】
また、上記課題を解決するために本開示の一態様は、上記に記載のロボットと、射出成形によって前記第1成形品及び前記第2成形品を含む2個以上の成形品を成形する射出成形機構と、を備え、前記ロボットにより、前記射出成形機構によって成形された前記2個以上の成形品のうちの前記第1成形品及び前記第2成形品のそれぞれをパレタイズする、射出成形機である。
【図面の簡単な説明】
【0009】
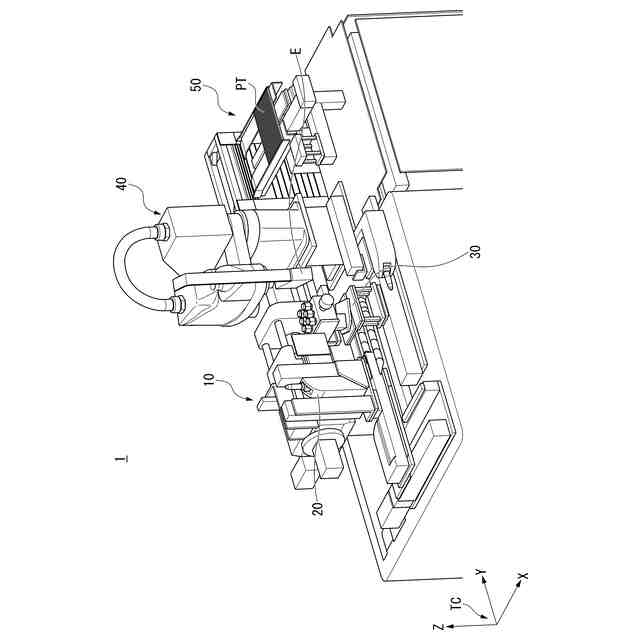
射出成形機1の構成の一例を示す斜視図である。
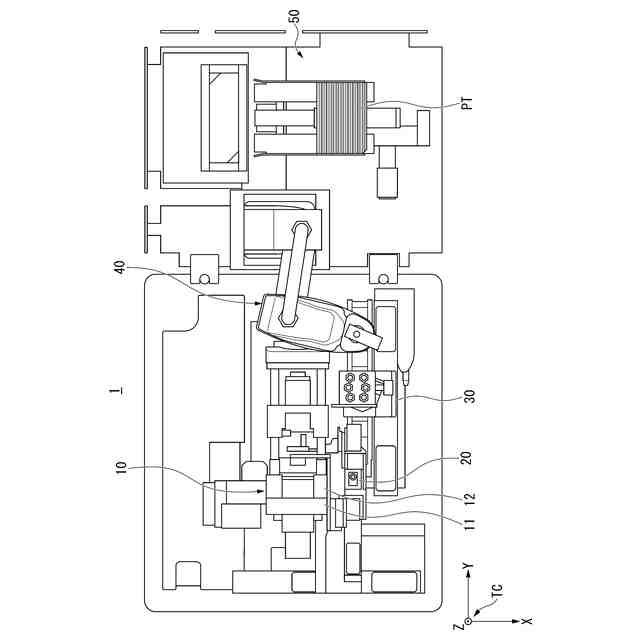
図1に示した射出成形機1の上面図である。
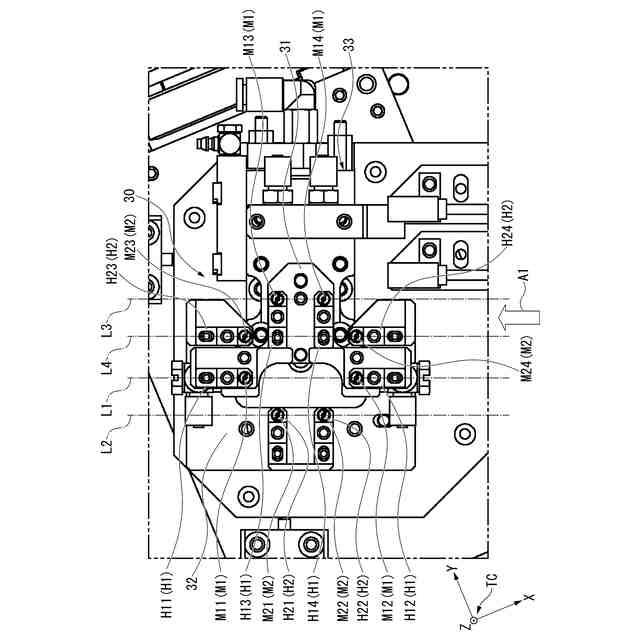
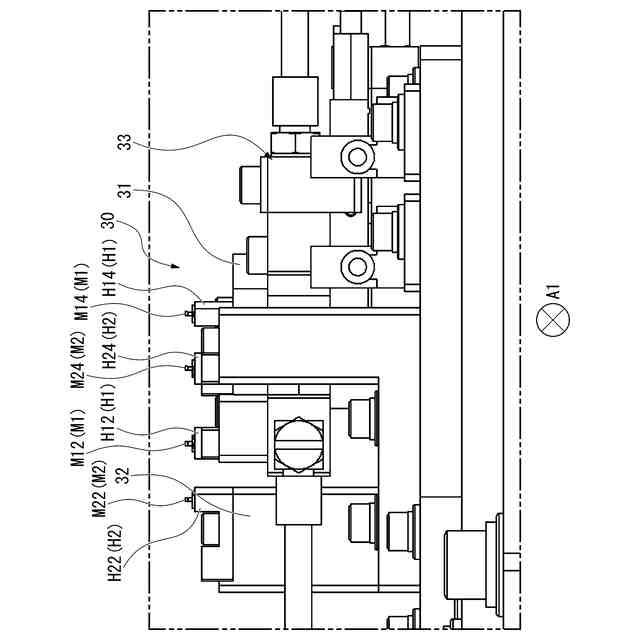
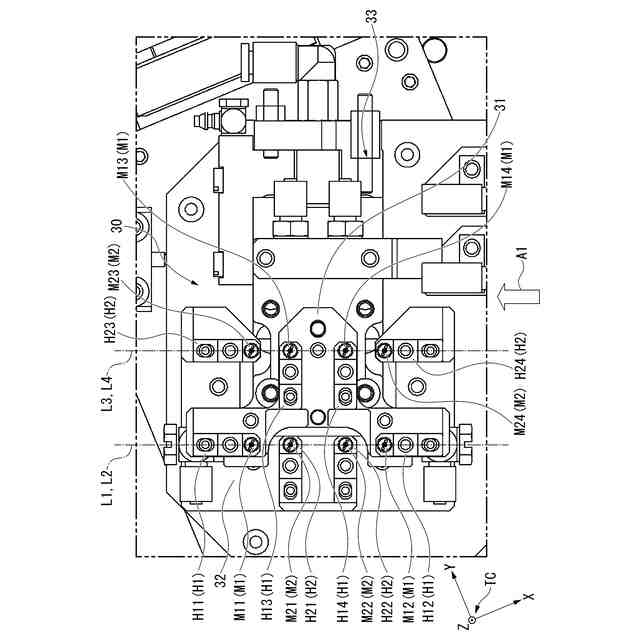
配置機構30の構成の一例を示す上面図である。
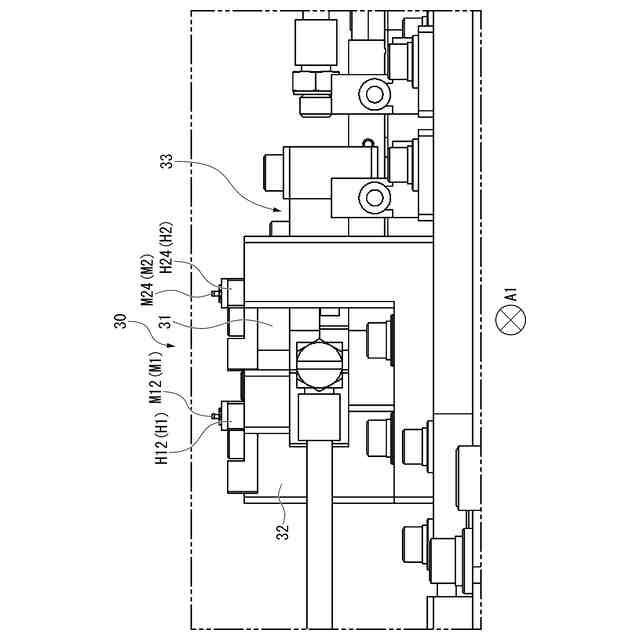
図3に示した矢印A1が示す方向に向かって見た場合の配置機構30の側面図である。
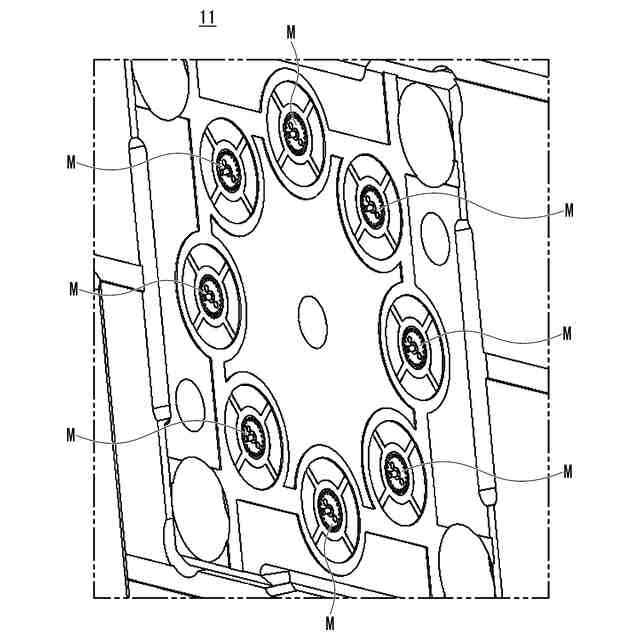
コア12が有する面のうちキャビティー11と対向する面の構成の一例を示す図である。
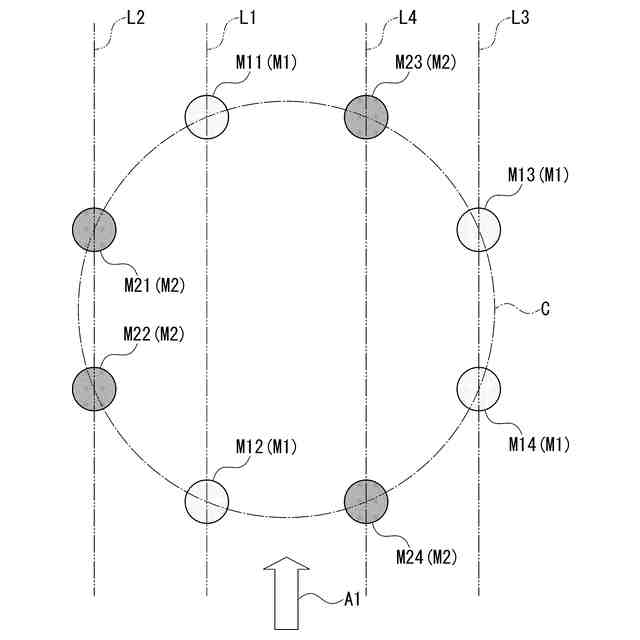
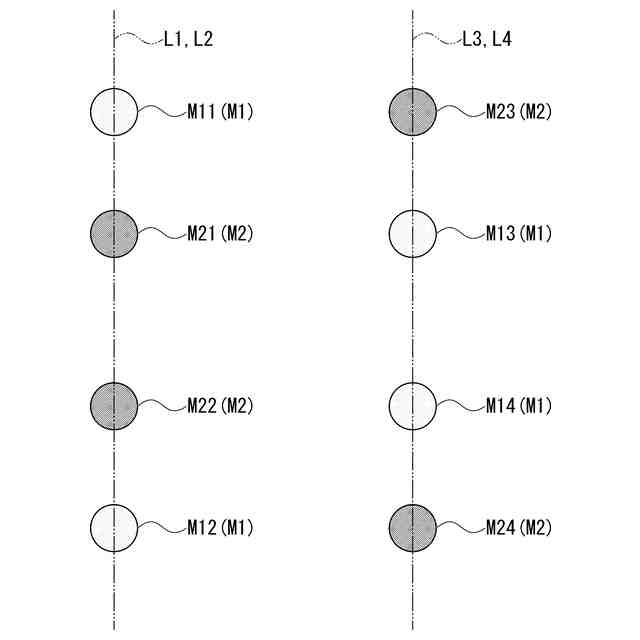
図3に示した配置機構30上に載置されている8個の成形品Mの配置を示す図である。
図6に示した8個の成形品Mの配置が、第2基台32に対して第1基台31が第1基台移動距離近づくことによって変化した後の配置を示す図である。
図3に示した配置機構30において、第2基台32に対する第1基台31の相対的な位置が第2位置に変化した後の様子の一例を示す上面図である。
図8に示した矢印A1が示す方向に向かって見た場合の配置機構30の側面図である。
成形品Mが載置されるための複数の直線状の溝が形成されたパレットPTの一例を示す図である。
図10に示したパレットPTに形成された複数の直線状の溝のうちのある溝SLにある成形品Mが載置されている様子の一例を示す図である。
第2基台32に対する第1基台31の相対的な位置が第1位置である場合における配置機構30上に載置された6個の成形品Mの配置の一例を示す図である。
図12に示した6個の成形品Mの配置が、第2基台32に対して第1基台31が第2基台移動距離近づくことによって変化した後の配置を示す図である。
第2基台32に対する第1基台31の相対的な位置が第1位置である場合における配置機構30上に載置された3個の成形品Mの配置の一例を示す図である。
図14に示した3個の成形品Mの配置が、第2基台32に対して第1基台31が第3基台移動距離近づくことによって変化した後の配置を示す図である。
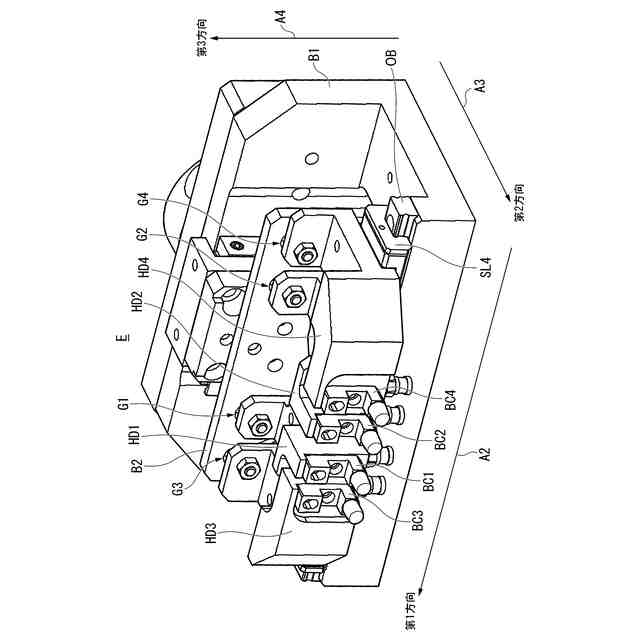
エンドエフェクターEの構成の一例を示す斜視図である。
図16に示したエンドエフェクターEの正面図である。
図16に示したエンドエフェクターEの下面図である。
間隔L31及び間隔L32が間隔L11よりも狭い理由を説明するための図である。
第A基台B1に対する第B基台B2の相対的な位置が第B位置である場合におけるエンドエフェクターEの斜視図である。
図20に示したエンドエフェクターEの正面図である。
図20に示したエンドエフェクターEの下面図である。
【発明を実施するための形態】
【0010】
<実施形態>
以下、本開示の実施形態について、図面を参照して説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
他の特許を見る
 特許ウォッチ
特許ウォッチ