TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025042773
公報種別
公開特許公報(A)
公開日
2025-03-28
出願番号
2023149897
出願日
2023-09-15
発明の名称
配置機構、ロボット、及び射出成形システム
出願人
セイコーエプソン株式会社
代理人
個人
,
個人
,
個人
主分類
B22F
3/02 20060101AFI20250321BHJP(鋳造;粉末冶金)
要約
【課題】簡易な構造によって複数の成形品同士の配置を変更可能な配置機構を提供すること。
【解決手段】3個以上の成形品の配置を変更する配置機構であって、架台に対して動かないように固定され、第11成形品を含む1個以上の第1成形品が載置される第1基台と、前記第1基台に対して相対的に移動可能に設けられ、第21成形品を含む1個以上の第2成形品が載置される第2基台と、前記第2基台の移動に応じて移動可能に設けられ、第31成形品を含む1個以上の第3成形品が載置される第3基台と、を備え、前記第2基台の前記第1基台に対する相対的な移動に応じて、前記第11成形品と、前記第21成形品と、前記第31成形品とを含む複数の成形品の配置を変更する、配置機構。
【選択図】図7
特許請求の範囲
【請求項1】
3個以上の成形品の配置を変更する配置機構であって、
架台に対して動かないように固定され、第11成形品を含む1個以上の第1成形品が載置される第1基台と、
前記第1基台に対して相対的に移動可能に設けられ、第21成形品を含む1個以上の第2成形品が載置される第2基台と、
前記第2基台の移動に応じて移動可能に設けられ、第31成形品を含む1個以上の第3成形品が載置される第3基台と、
を備え、
前記第2基台の前記第1基台に対する相対的な移動に応じて、前記第11成形品と、前記第21成形品と、前記第31成形品とを含む複数の成形品の配置を変更する、
配置機構。
続きを表示(約 2,500 文字)
【請求項2】
前記第11成形品は、仮想的な第1直線上に位置しており、
前記第2基台の前記第1基台に対する相対的な位置は、第1位置と第2位置との間で変化し、
前記第2基台の前記第1基台に対する相対的な位置が前記第1位置である場合、前記第21成形品と、前記第31成形品とは、前記第1直線上に並ばず、
前記第2基台の前記第1基台に対する相対的な位置が前記第2位置である場合、前記第21成形品と、前記第31成形品とは、前記第1直線上に並び、
前記第2基台の前記第1基台に対する相対的な位置の前記第1位置から前記第2位置への変化に応じた前記第21成形品の移動距離は、前記変化に応じた前記第31成形品の移動距離と異なる、
請求項1に記載の配置機構。
【請求項3】
前記第1基台は、前記第11成形品が載置される第11載置部が設けられており、
前記第2基台は、前記第21成形品が載置される第21載置部が設けられており、
前記第3基台は、前記第31成形品が載置される第31載置部が設けられている、
請求項2に記載の配置機構。
【請求項4】
前記第1基台は、前記第2基台の上に設けられ、
前記第1基台には、前記第21載置部が貫通する第11空隙が形成されており、
前記第2基台は、前記第3基台の上に設けられ、
前記第2基台には、前記第31載置部が貫通する第21空隙が形成されている、
請求項3に記載の配置機構。
【請求項5】
前記第2基台の前記第1基台に対する相対的な位置が前記第1位置である場合、前記第21成形品と、前記第31成形品とは、前記第1直線上に並ばず、
前記第2基台の前記第1基台に対する相対的な位置が前記第2位置である場合、前記第21成形品と、前記第31成形品とは、前記第1直線上に並び、
前記第2基台は、前記第1位置と前記第2位置との間を移動する場合、前記第1位置と前記第2位置との間の第3位置において前記第31載置部と接触する、
請求項4に記載の配置機構。
【請求項6】
前記第2基台の移動に応じて移動可能に設けられ、第41成形品を含む1個以上の第4成形品が載置される第4基台を更に備え、
前記第1基台には、前記第11成形品、第12成形品、第13成形品、第14成形品の4個の前記第1成形品が載置され、
前記第2基台には、前記第21成形品、第22成形品、第23成形品、第24成形品の4個の前記第2成形品が載置され、
前記第3基台には、前記第31成形品、第32成形品の2個の前記第3成形品が載置され、
前記第4基台には、前記第41成形品、第42成形品の2個の前記第4成形品が載置され、
前記配置機構は、前記第2基台の前記第1基台に対する相対的な移動に応じて、前記第11成形品と前記第12成形品と前記第21成形品と前記第22成形品と前記第31成形品と前記第32成形品とを、仮想的な第1直線上に配置し、前記第13成形品と前記第14成形品と前記第23成形品と前記第24成形品と前記第41成形品と前記第42成形品とを、前記第1直線と平行な第2直線上に配置する、
請求項1に記載の配置機構。
【請求項7】
前記第2基台の前記第1基台に対する相対的な位置は、第1位置と第2位置との間で変化し、
前記第11成形品及び前記第12成形品は、前記第1直線上に位置しており、
前記第13成形品及び前記第14成形品は、前記第2直線上に位置しており、
前記第2基台の前記第1基台に対する相対的な位置が前記第1位置である場合、前記第11成形品、前記第12成形品、前記第13成形品、前記第14成形品、前記第21成形品、前記第22成形品、前記第23成形品、前記第24成形品、前記第31成形品、前記第32成形品、前記第41成形品、前記第42成形品のそれぞれは、前記第1基台に対して予め決められた仮想的な円周上に配置され、
前記第2基台の前記第1基台に対する相対的な位置が前記第2位置である場合、前記第11成形品と前記第12成形品と前記第21成形品と前記第22成形品と前記第31成形品と前記第32成形品とが前記第1直線上に配置され、且つ、前記第13成形品と前記第14成形品と前記第23成形品と前記第24成形品と前記第41成形品と前記第42成形品とが前記第2直線上に配置される、
請求項6に記載の配置機構。
【請求項8】
3個以上の成形品を搬送するロボットであって、
エンドエフェクターを備え、
前記エンドエフェクターは、
架台に対して動かないように固定され、第11成形品を含む1個以上の第1成形品が載置される第1基台と、
前記第1基台に対して相対的に移動可能に設けられ、第21成形品を含む1個以上の第2成形品が載置される第2基台と、
前記第2基台の移動に応じて移動可能に設けられ、第31成形品を含む1個以上の第3成形品が載置される第3基台と、
を有し、
前記エンドエフェクターは、前記第2基台の前記第1基台に対する相対的な移動に応じて、前記第11成形品と、前記第21成形品と、前記第31成形品とを含む複数の成形品の配置を変更する、
ロボット。
【請求項9】
請求項1から7のうちいずれか一項に記載の配置機構と、
射出成形によって前記3個以上の成形品を成形する射出成形装置と、
前記射出成形装置によって成形された前記3個以上の成形品のうち前記1個以上の前記第1成形品を前記第1基台に載置し、前記射出成形装置によって成形された前記3個以上の成形品のうち前記1個以上の前記第2成形品を前記第2基台に載置し、前記射出成形装置によって成形された前記3個以上の成形品のうち前記1個以上の前記第3成形品を前記第3基台に載置するロボットと、
を備える射出成形システム。
発明の詳細な説明
【技術分野】
【0001】
この開示は、配置機構、ロボット、及び射出成形システムに関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
金属粉末を含む成形材料を用いた射出成形装置により成形された複数の成形品を所望の位置へ配置する技術についての研究、開発が行われている。
【0003】
これに関し、載置された複数の成形品同士の間隔を変更可能な配置機構が知られている(特許文献1参照)。
【先行技術文献】
【特許文献】
【0004】
特開2006-017575号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1に記載されたような配置機構は、多くの可動部品を有し、複雑で大掛かりな構造となっている。これは、配置機構の製造コストの増大を招くため、好ましいことではない。
【課題を解決するための手段】
【0006】
上記課題を解決するために本開示の一態様は、3個以上の成形品の配置を変更する配置機構であって、架台に対して動かないように固定され、第11成形品を含む1個以上の第1成形品が載置される第1基台と、前記第1基台に対して相対的に移動可能に設けられ、第21成形品を含む1個以上の第2成形品が載置される第2基台と、前記第2基台の移動に応じて移動可能に設けられ、第31成形品を含む1個以上の第3成形品が載置される第3基台と、を備え、前記第2基台の前記第1基台に対する相対的な移動に応じて、前記第11成形品と、前記第21成形品と、前記第31成形品とを含む複数の成形品の配置を変更する、配置機構である。
【0007】
また、上記課題を解決するために本開示の一態様は、3個以上の成形品を搬送するロボットであって、エンドエフェクターを備え、前記エンドエフェクターは、架台に対して動かないように固定され、第11成形品を含む1個以上の第1成形品が載置される第1基台と、前記第1基台に対して相対的に移動可能に設けられ、第21成形品を含む1個以上の第2成形品が載置される第2基台と、前記第2基台の移動に応じて移動可能に設けられ、第31成形品を含む1個以上の第3成形品が載置される第3基台と、を有し、前記エンドエフェクターは、前記第2基台の前記第1基台に対する相対的な移動に応じて、前記第11成形品と、前記第21成形品と、前記第31成形品とを含む複数の成形品の配置を変更する、ロボットである。
【0008】
また、上記課題を解決するために本開示の一態様は、上記に記載の配置機構と、射出成形によって前記3個以上の成形品を成形する射出成形装置と、前記射出成形装置によって成形された前記3個以上の成形品のうち前記1個以上の前記第1成形品を前記第1基台に載置し、前記射出成形装置によって成形された前記3個以上の成形品のうち前記1個以上の前記第2成形品を前記第2基台に載置し、前記射出成形装置によって成形された前記3個以上の成形品のうち前記1個以上の前記第3成形品を前記第3基台に載置するロボットと、を備える射出成形システムである。
【図面の簡単な説明】
【0009】
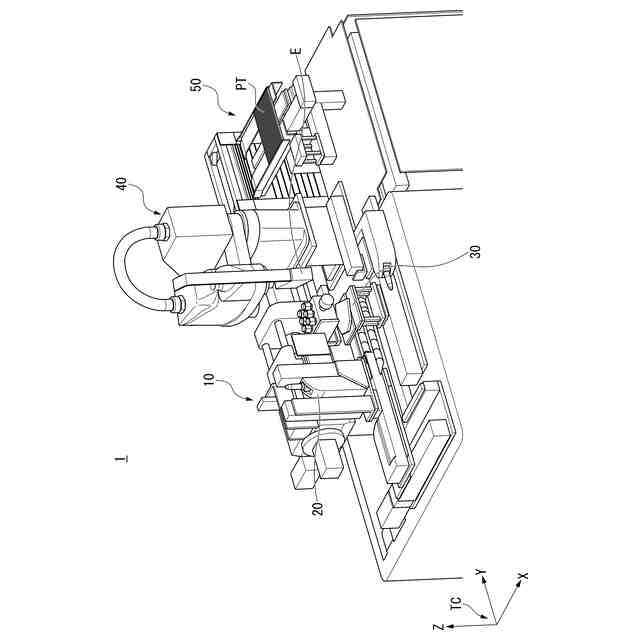
射出成形システム1の構成の一例を示す斜視図である。
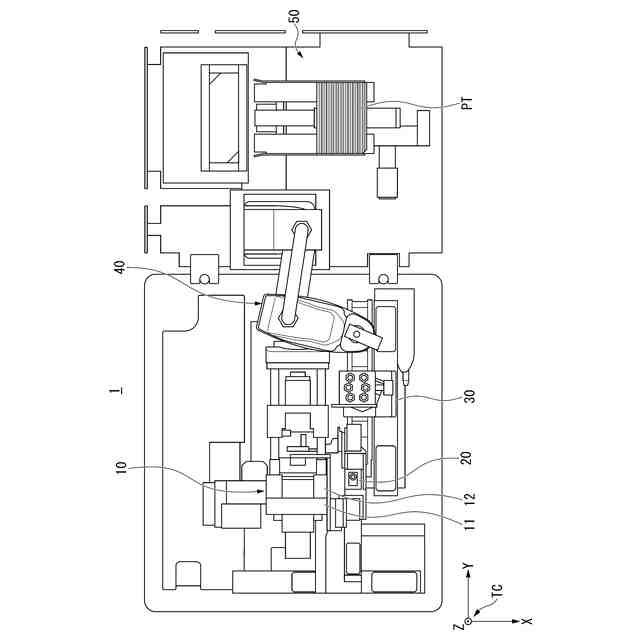
図1に示した射出成形システム1の上面図である。
配置機構30上において円環状配置に配置されている12個の成形品Mの様子の一例を示す図である。
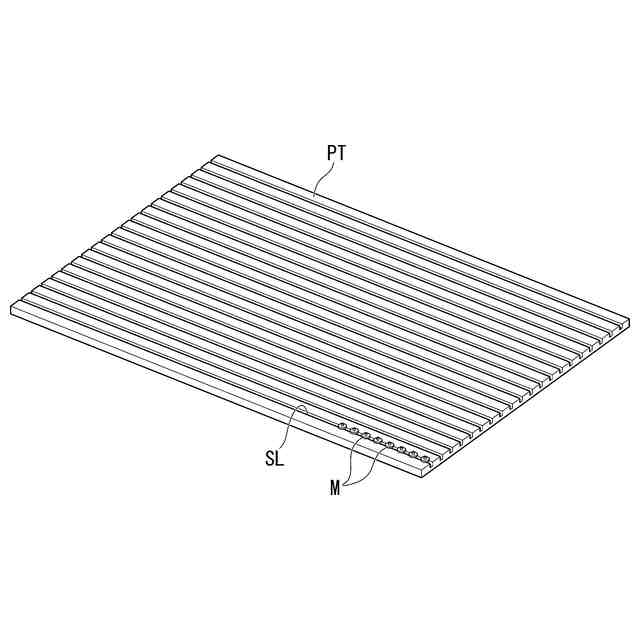
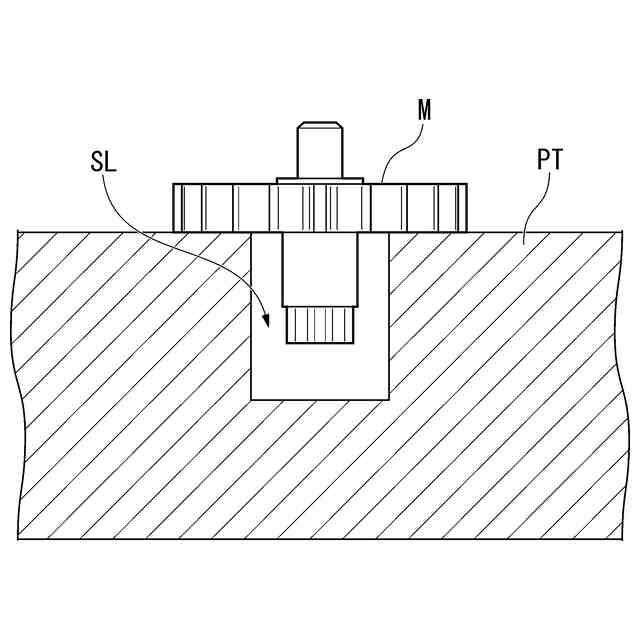
成形品Mが載置されるための複数の直線状の溝が形成されたパレットPTの一例を示す図である。
図4に示したパレットPTに形成された複数の直線状の溝のうちのある溝SLにある成形品Mが載置されている様子の一例を示す図である。
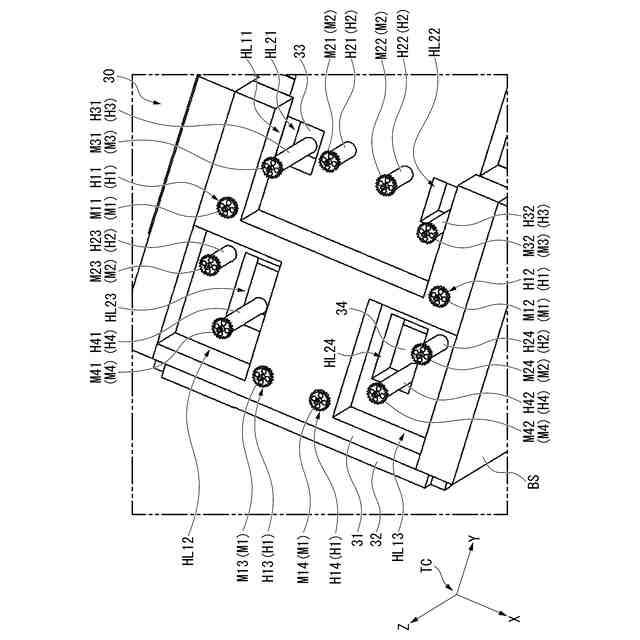
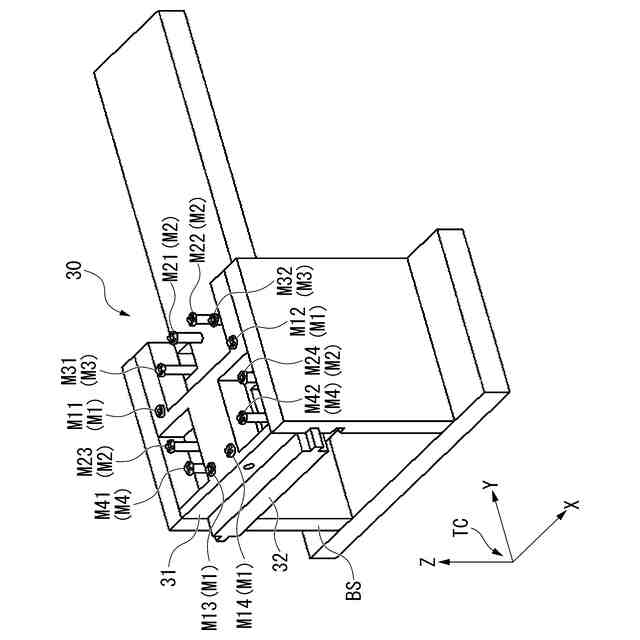
配置機構30の構成の一例を示す斜視図である。
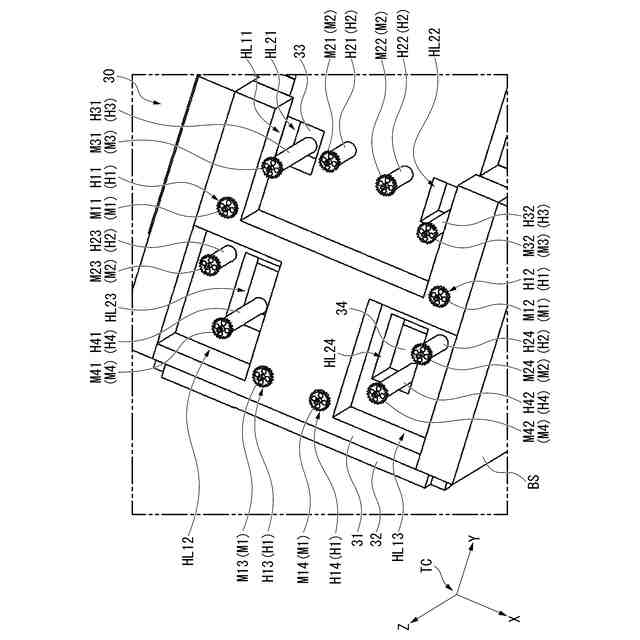
図6に示した配置機構30を異なる方向から見た斜視図である。
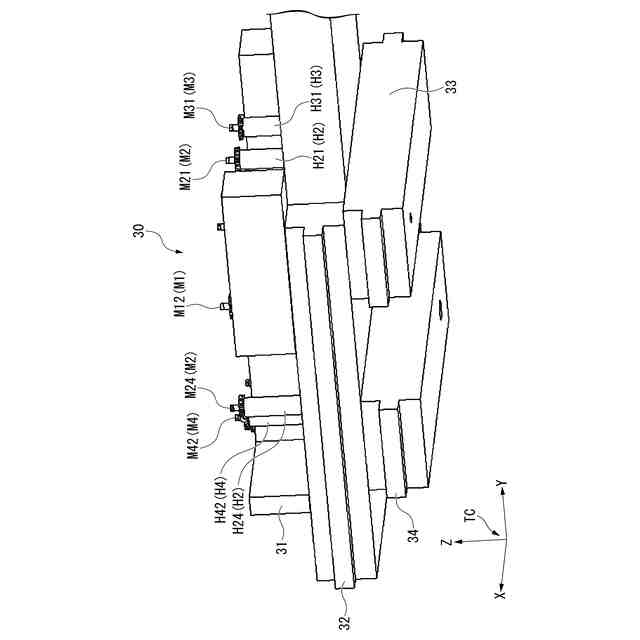
図6に示した配置機構30を更に異なる方向から見た斜視図である。
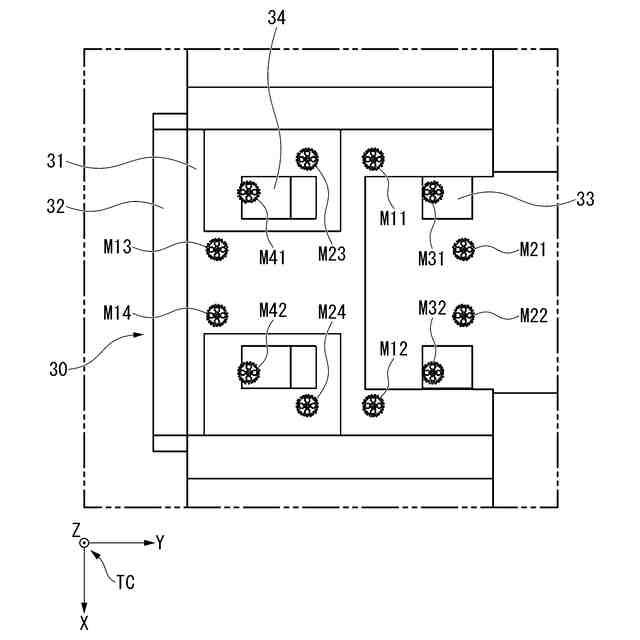
4つの基台同士の相対的な位置が第1位置である場合における配置機構30の一例を示す上面図である。
図9に示した配置機構30の斜視図である。
第2基台32の位置が第23位置である場合における配置機構30の一例を示す上面図である。
図11に示した配置機構30の斜視図である。
第2基台32の位置が第24位置である場合における配置機構30の一例を示す上面図である。
図13に示した配置機構30の斜視図である。
第2基台32の位置が第22位置である場合における配置機構30の一例を示す上面図である。
図15に示した配置機構30の斜視図である。
移動部35を備える配置機構30の一例を示す図である。
Y軸と平行に移動可能なように1軸ロボット36上に設けられた配置機構30の一例を示す図である。
壁部材Wと第2基台32とが接触した直後の配置機構30の一例を示す図である。
【発明を実施するための形態】
【0010】
<実施形態>
以下、本開示の実施形態について、図面を参照して説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
他の特許を見る

 特許ウォッチ
特許ウォッチ