TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025041830
公報種別
公開特許公報(A)
公開日
2025-03-26
出願番号
2024227511,2021116728
出願日
2024-12-24,2021-07-14
発明の名称
電動弁
出願人
株式会社不二工機
代理人
弁理士法人オーパス国際特許事務所
主分類
F16K
31/04 20060101AFI20250318BHJP(機械要素または単位;機械または装置の効果的機能を生じ維持するための一般的手段)
要約
【課題】弁体の形状に依存せずに所望の流量特性を得ることができる電動弁を提供する。
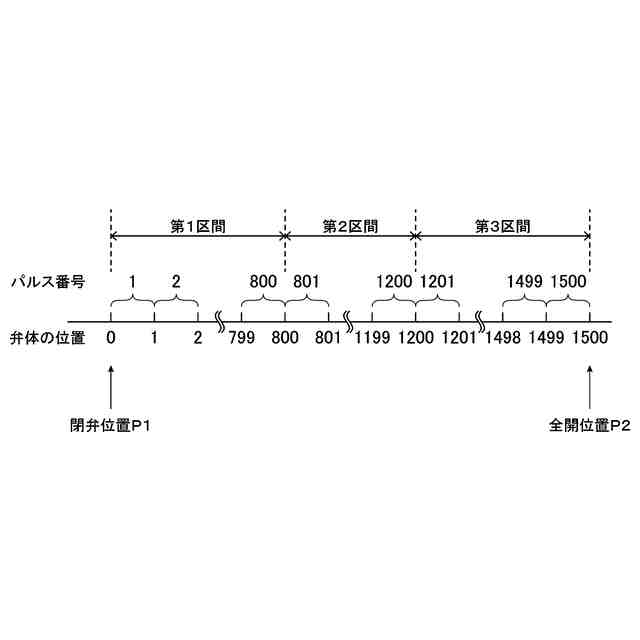
【解決手段】制御装置200は、弁体の閉弁位置から全開位置まで順番に割り当てられたパルス番号に関するパルス番号情報と、パルス番号のそれぞれに対応するステップ角度に関するステップ角度情報と、を格納している。制御装置200は、弁体移動命令に応じたパルス番号を取得して、パルス番号の順番に各パルス番号に対応するステップ角度でステッピングモーターを回転させる。弁体の基準位置から全開位置までの間に、第1区間と第2区間と第3区間とが設定される。第1区間にはフルステップ動作を1/nしたマイクロステップ動作のステップ角度が設定され、第2区間にはフルステップ動作を1/mしたマイクロステップ動作のステップ角度が設定され、第3区間には、フルステップ動作のステップ角度が設定される。
【選択図】図7
特許請求の範囲
【請求項1】
弁口を有する弁本体と、前記弁口と対向して配置された弁体と、前記弁体を前記弁口との対向方向に移動させる駆動機構と、前記駆動機構を制御する制御装置と、を有する電動弁であって、
前記駆動機構が、ステッピングモーターを有し、前記ステッピングモーターの回転によって前記弁体を移動させ、
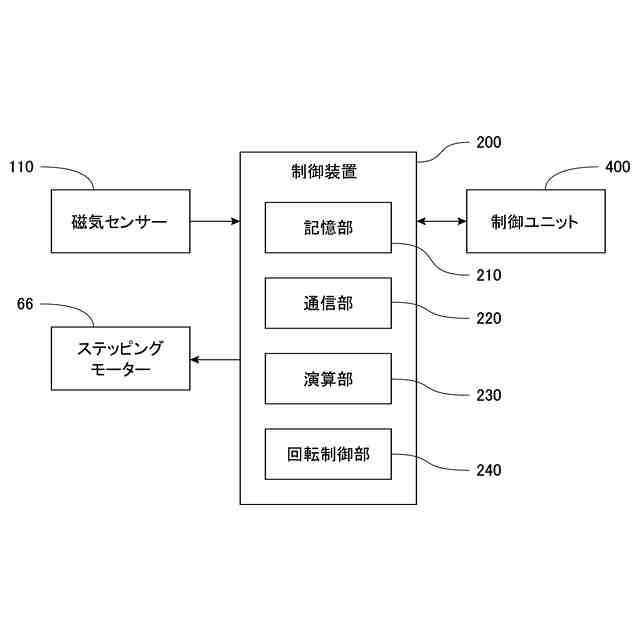
前記制御装置が、
前記弁体の基準位置から全開位置まで順番に割り当てられたパルス番号に関するパルス番号情報と、前記パルス番号のそれぞれに対応するステップ角度に関するステップ角度情報と、を格納する記憶部と、
前記弁体の移動目標位置に関する弁体移動命令を外部装置から受信する通信部と、
前記弁体の現在位置から前記移動目標位置までに割り当てられた前記パルス番号を取得する演算部と、
前記弁体の前記現在位置から前記移動目標位置までに割り当てられた前記パルス番号の順番に各パルス番号に対応する前記ステップ角度で前記ステッピングモーターを回転させる回転制御部と、を有し、
前記ステッピングモーターにモータードライバが接続され、
前記回転制御部が、前記パルス番号に対応する前記ステップ角度情報を用いて取得した前記ステップ角度を前記モータードライバに入力して前記ステッピングモーターを回転させることを特徴とする電動弁。
続きを表示(約 2,200 文字)
【請求項2】
前記弁体の前記基準位置から前記全開位置までの間に、第1区間と第2区間と第3区間とが設定され、
前記第1区間に割り当てられた前記パルス番号に対応する前記ステップ角度に、第1角度が設定され、
前記第2区間に割り当てられた前記パルス番号に対応する前記ステップ角度に、第2角度が設定され、
前記第3区間に割り当てられた前記パルス番号に対応する前記ステップ角度に、第3角度が設定され、
前記第1角度と前記第2角度と前記第3角度とが互いに異なる、請求項1に記載の電動弁。
【請求項3】
前記第1角度が、前記ステッピングモーターのフルステップ動作を1/nしたマイクロステップ動作におけるステップ角度であり、
前記第2角度が、前記ステッピングモーターのフルステップ動作を1/mしたマイクロステップ動作におけるステップ角度であり、
前記第3角度が、前記ステッピングモーターのフルステップ動作におけるステップ角度である、請求項2に記載の電動弁。
ただし、m、nは2以上の自然数であり、m≠nである。
【請求項4】
前記弁体が、前記弁口に向かうにしたがって径が小さくなる1つのテーパー面を有し、
前記弁体が前記第1区間、前記第2区間または前記第3区間にあるとき、前記テーパー面と前記弁口の内周面との隙間によって流量が決定される、請求項2または請求項3に記載の電動弁。
【請求項5】
前記弁体が前記第1区間にあるときのパルス速度が、前記弁体が前記第3区間にあるときのパルス速度のn倍であり、
前記弁体が前記第2区間にあるときのパルス速度が、前記弁体が前記第3区間にあるときのパルス速度のm倍である、請求項3に記載の電動弁。
【請求項6】
前記弁体の前記基準位置から前記全開位置までの間に、第1区間と第2区間とが設定され、
前記第1区間に割り当てられた前記パルス番号に対応する前記ステップ角度に、第1角度が設定され、
前記第2区間に割り当てられた前記パルス番号に対応する前記ステップ角度に、第2角度が設定され、
前記第1角度と前記第2角度とが異なる、請求項1に記載の電動弁。
【請求項7】
前記第1角度が、前記ステッピングモーターのフルステップ動作を1/nしたマイクロステップ動作におけるステップ角度であり、
前記第2角度が、前記ステッピングモーターのフルステップ動作におけるステップ角度である、請求項6に記載の電動弁。
ただし、nは2以上の自然数である。
【請求項8】
前記弁体が、前記弁口に向かうにしたがって径が小さくなる1つのテーパー面を有し、
前記弁体が前記第1区間または前記第2区間にあるとき、前記テーパー面と前記弁口の内周面との隙間によって流量が決定される、請求項6または請求項7に記載の電動弁。
【請求項9】
前記弁体が前記第1区間にあるときのパルス速度が、前記弁体が前記第2区間にあるときのパルス速度のn倍である、請求項7に記載の電動弁。
【請求項10】
弁口を有する弁本体と、前記弁口と対向して配置された弁体と、前記弁体を前記弁口との対向方向に移動させる駆動機構と、前記駆動機構を制御する制御装置と、を有する電動弁であって、
前記駆動機構が、ステッピングモーターを有し、前記ステッピングモーターの回転によって前記弁体を移動させ、
前記制御装置が、
前記弁体の基準位置から全開位置まで順番に割り当てられたパルス番号に関するパルス番号情報と、前記パルス番号のそれぞれに対応するステップ角度に関するステップ角度情報と、を格納する記憶部と、
前記弁体の移動目標位置に関する弁体移動命令を外部装置から受信する通信部と、
前記弁体の現在位置から前記移動目標位置までに割り当てられた前記パルス番号を取得する演算部と、
前記弁体の前記現在位置から前記移動目標位置までに割り当てられた前記パルス番号の順番に各パルス番号に対応する前記ステップ角度で前記ステッピングモーターを回転させる回転制御部と、を有し、
前記記憶部が、
前記弁体の前記基準位置から前記全開位置まで順番に割り当てられたパルス番号に関する起動状態パルス番号情報と、前記起動状態パルス番号情報の前記パルス番号のそれぞれに対応するステップ角度に関する起動状態ステップ角度情報と、
前記弁体の前記基準位置から前記全開位置まで順番に割り当てられたパルス番号に関する通常動作状態パルス番号情報と、前記通常動作状態パルス番号情報の前記パルス番号のそれぞれに対応するステップ角度に関する通常動作状態ステップ角度情報と、を格納し、
前記制御装置が、
起動状態のときに前記起動状態パルス番号情報および前記起動状態ステップ角度情報を前記パルス番号情報および前記ステップ角度情報として用い、
前記起動状態のあとの通常動作状態のときに前記通常動作状態パルス番号情報および前記通常動作状態ステップ角度情報を前記パルス番号情報および前記ステップ角度情報として用いる、電動弁。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、例えば、空気調和機の冷凍サイクルで用いられる電動弁に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
特許文献1は、従来の電動弁を開示している。特許文献1の電動弁は、弁体と、ステッピングモーターと、を有している。弁体は、弁口と対向して配置されている。弁体は、ステッピングモーターの回転によって弁口との対向方向に移動される。
【先行技術文献】
【特許文献】
【0003】
特開平8-268030号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
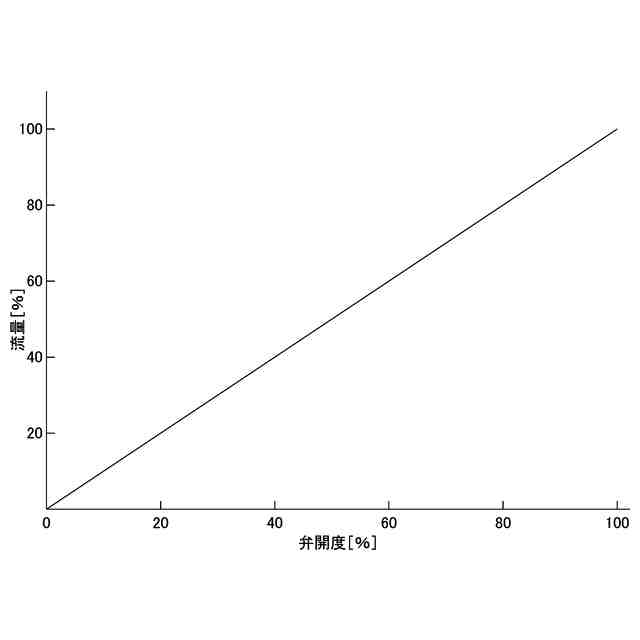
上述した電動弁では、ステッピングモーターはパルスに応じて回転する。ステッピングモーターの1パルスあたりの回転角度(ステップ角度)は一定であり、1パルスあたりの弁体の移動量も一定である。そのため、電動弁の流量特性は弁体の形状に依存し、所望の流量特性を得るためには、流量特性に応じた形状を有する弁体を用いる必要があった。
【0005】
そこで、本発明は、弁体の形状に依存せずに所望の流量特性を得ることができる電動弁を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するために、本発明に係る電動弁は、弁口を有する弁本体と、前記弁口と対向して配置された弁体と、前記弁体を前記弁口との対向方向に移動させる駆動機構と、前記駆動機構を制御する制御装置と、を有する電動弁であって、前記駆動機構が、ステッピングモーターを有し、前記ステッピングモーターの回転によって前記弁体を移動させ、前記制御装置が、前記弁体の基準位置から全開位置まで順番に割り当てられたパルス番号に関するパルス番号情報と、前記パルス番号のそれぞれに対応するステップ角度に関するステップ角度情報と、を格納する記憶部と、前記弁体の移動目標位置に関する弁体移動命令を外部装置から受信する通信部と、前記弁体の現在位置から前記移動目標位置までに割り当てられた前記パルス番号を取得する演算部と、前記弁体の前記現在位置から前記移動目標位置までに割り当てられた前記パルス番号の順番に各パルス番号に対応する前記ステップ角度で前記ステッピングモーターを回転させる回転制御部と、を有することを特徴とする。
【0007】
本発明において、前記弁体の前記基準位置から前記全開位置までの間に、第1区間と第2区間と第3区間とが設定され、前記第1区間に割り当てられた前記パルス番号に対応する前記ステップ角度に、第1角度が設定され、前記第2区間に割り当てられた前記パルス番号に対応する前記ステップ角度に、第2角度が設定され、前記第3区間に割り当てられた前記パルス番号に対応する前記ステップ角度に、第3角度が設定され、前記第1角度と前記第2角度と前記第3角度とが互いに異なる、ことが好ましい。
【0008】
本発明において、前記第1角度が、前記ステッピングモーターのフルステップ動作を1/nしたマイクロステップ動作におけるステップ角度であり、前記第2角度が、前記ステッピングモーターのフルステップ動作を1/mしたマイクロステップ動作におけるステップ角度であり、前記第3角度が、前記ステッピングモーターのフルステップ動作におけるステップ角度である、ことが好ましい。ただし、m、nは2以上の自然数であり、m≠nである。
【0009】
本発明において、前記弁体が、前記弁口に向かうにしたがって径が小さくなる1つのテーパー面を有し、前記弁体が前記第1区間、前記第2区間または前記第3区間にあるとき、前記テーパー面と前記弁口の内周面との隙間によって流量が決定される、ことが好ましい。
【0010】
本発明において、前記弁体が前記第1区間にあるときのパルス速度が、前記弁体が前記第3区間にあるときのパルス速度のn倍であり、前記弁体が前記第2区間にあるときのパルス速度が、前記弁体が前記第3区間にあるときのパルス速度のm倍である、ことが好ましい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
他の特許を見る



 特許ウォッチ
特許ウォッチ