TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025041141
公報種別
公開特許公報(A)
公開日
2025-03-26
出願番号
2023148249
出願日
2023-09-13
発明の名称
ハンディ溶接トーチ装着構造
出願人
株式会社アマダ
代理人
個人
,
個人
,
個人
主分類
B23K
9/12 20060101AFI20250318BHJP(工作機械;他に分類されない金属加工)
要約
【課題】ロボットの腕に対し、ハンディ溶接トーチを、ガタつき及び位置ずれを生じることなく確実に装着できるハンディ溶接トーチ装着構造を提供する。
【解決手段】ハンディ溶接トーチ装着構造(SK)は、ロボット(86)の腕(861)に固定される取り付け部(111)と、取り付け部(111)と一体に形成され、ハンディ溶接トーチ(7)を載置する長方形のベース板(12)と、ベース板(12)の第1縁部(12a)に、起立姿勢から開く方向に回動可能に支持された第1側板(13)と、第1縁部(12a)に対向する第2縁部(12b)に起立姿勢で固定された第2側板(17)と、を備える。ハンディ溶接トーチ(7)は、ベース板(12)に載せた状態で起立させた第1側板(13)と第2側板(17)との間に挟持されて保持されることで腕(861)に装着される。
【選択図】図4C
特許請求の範囲
【請求項1】
ロボットの腕に固定される取り付け部と、
前記取り付け部と一体に形成され、ハンディ溶接トーチを載置する長方形のベース板と、
前記ベース板の第1縁部に、起立姿勢から開く方向に回動可能に支持された第1側板と、
前記第1縁部に対向する第2縁部に起立姿勢で固定された第2側板と、
を備え、
前記ハンディ溶接トーチは、前記ベース板に載せた状態で起立させた前記第1側板と前記第2側板との間に挟持されて保持されることで前記腕に装着されるハンディ溶接トーチ装着構造。
続きを表示(約 210 文字)
【請求項2】
前記第1側板と前記第2側板とを連結して固定するクランプ板を有する請求項1記載のハンディ溶接トーチ装着構造。
【請求項3】
前記第1側板及び前記第2側板それぞれは、螺進させることで挟持した前記ハンディ溶接トーチを押し付けるボルトを有する請求項1又は請求項2記載のハンディ溶接トーチ装着構造。
【請求項4】
前記ボルトは樹脂ボルトである請求項3記載のハンディ溶接トーチ装着構造。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ハンディ溶接トーチ装着構造に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
多関節ロボットの腕の先端に溶接トーチを取り付けて自動溶接を行う技術が知られており、特許文献1に記載されている。
【先行技術文献】
【特許文献】
【0003】
特開平8-25274号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
溶接トーチとして、作業者が手で把持して溶接を行えるいわゆるハンディ溶接トーチがある。このハンディ溶接トーチを、多関節ロボットの腕の先端に取り付けて、自動溶接にも利用可能とすることは有用である。しかしながら、ハンディ溶接トーチは、手で把持可能な特徴的な形状を有するので、大きい加速度で移動の開始及び停止を繰り返すロボットの腕に長期間ガタつきなどを生じることなく装着するのが難しいのが現状である。そこで、ロボットの腕に対し、ハンディ溶接トーチをガタつき及び位置ずれすることなく確実に装着できるハンディ溶接トーチ装着構造が望まれている。
【課題を解決するための手段】
【0005】
上記の課題を解決するために、本発明のハンディ溶接トーチ装着構造の一態様は、ロボットの腕に固定される取り付け部と、前記取り付け部と一体に形成され、ハンディ溶接トーチを載置する長方形のベース板と、前記ベース板の第1縁部に、起立姿勢から開く方向に回動可能に支持された第1側板と、前記第1縁部に対向する第2縁部に起立姿勢で固定された第2側板と、を備え、前記ハンディ溶接トーチは、前記ベース板に載せた状態で起立させた前記第1側板と前記第2側板との間に挟持されて保持されることで前記腕に装着されるハンディ溶接トーチ装着構造である。
【0006】
この一態様は、ハンディ溶接トーチを第1側板と第2側板とにより左右から挟持して保持する。そのため、ハンディ溶接トーチをガタつき及び位置ずれすることなく確実に装着できる。
【発明の効果】
【0007】
本発明のハンディ溶接トーチ装着構造の一態様によれば、ロボットの腕に対し、ハンディ溶接トーチを、ガタつき及び位置ずれを生じることなく確実に装着できる。
【図面の簡単な説明】
【0008】
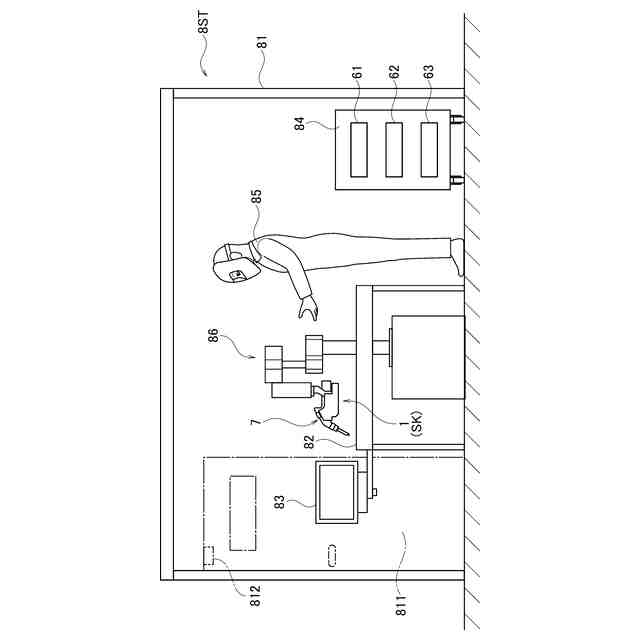
図1は、本発明のハンディ溶接トーチの装着構造の一態様であるハンディ溶接トーチ装着構造SKによりハンディタイプのトーチ7を装着した多関節ロボット86を収容したレーザ溶接ルーム8STを示す模式図である。
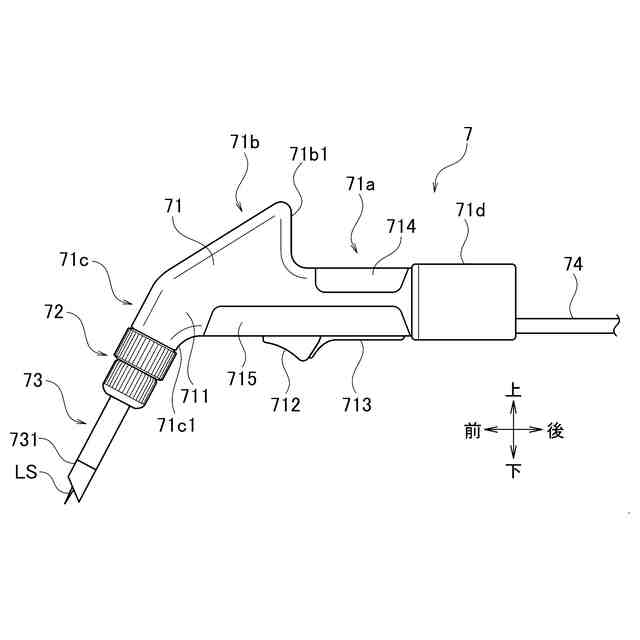
図2Aは、トーチ7の左側面図である。
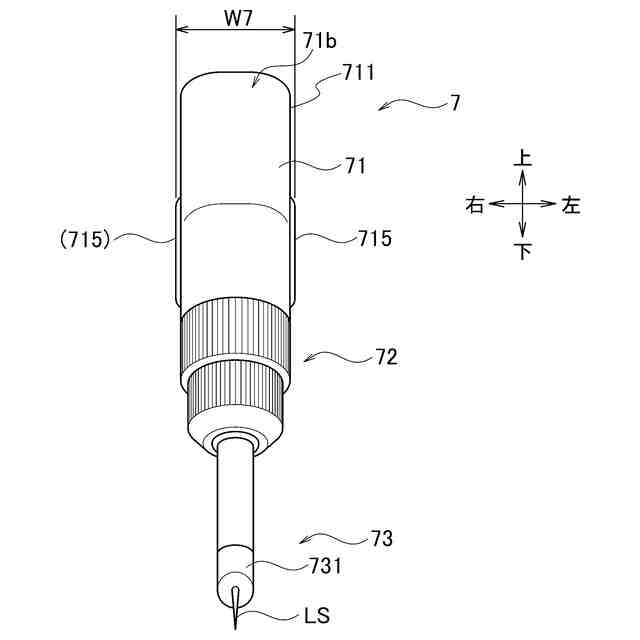
図2Bは、トーチ7の前面図である。
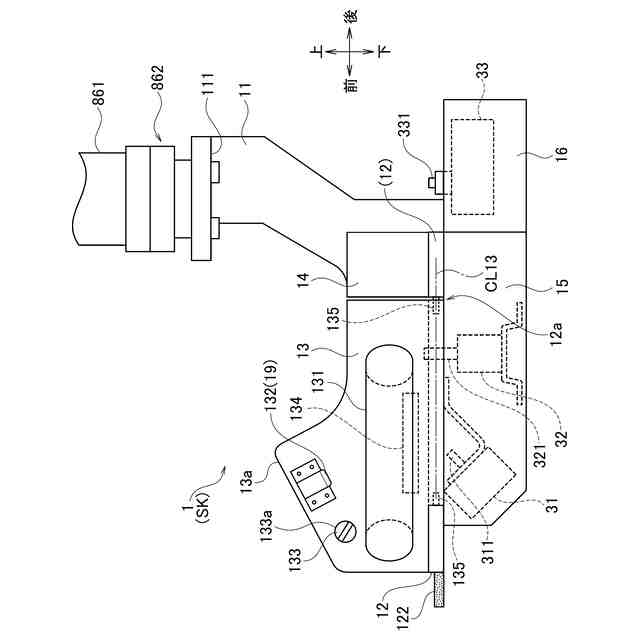
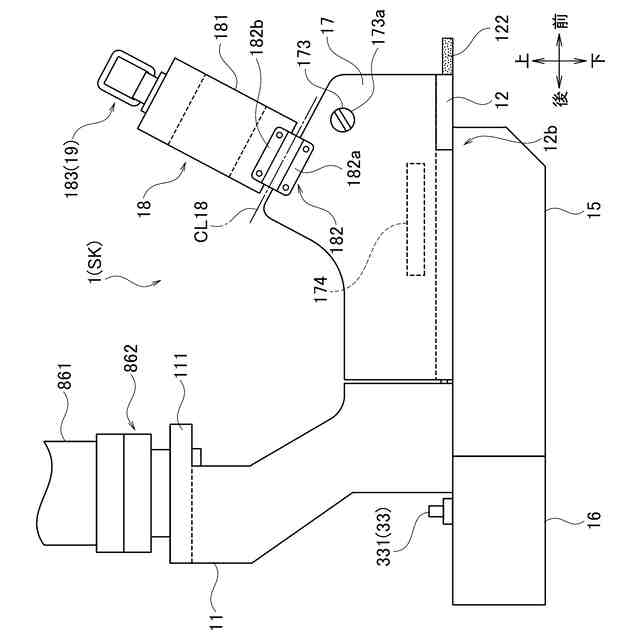
図3Aは、トーチ装着部1の左側面図である。
図3Bは、トーチ装着部1の右側面図である。
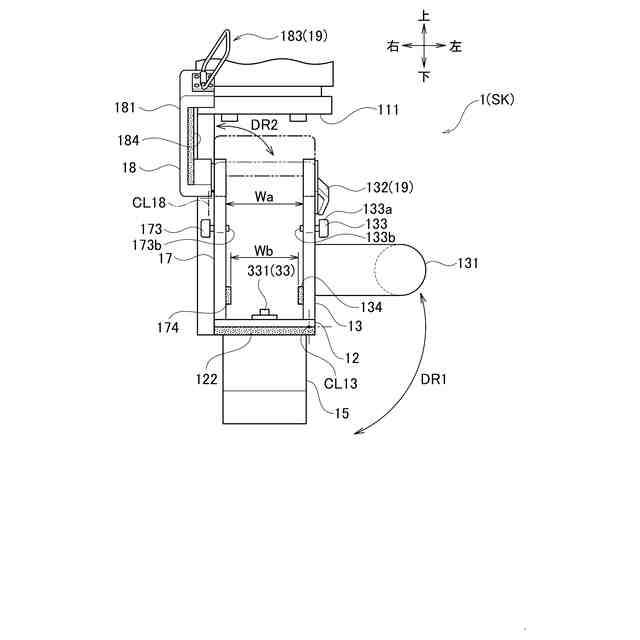
図3Cは、トーチ装着部1の前面図である。
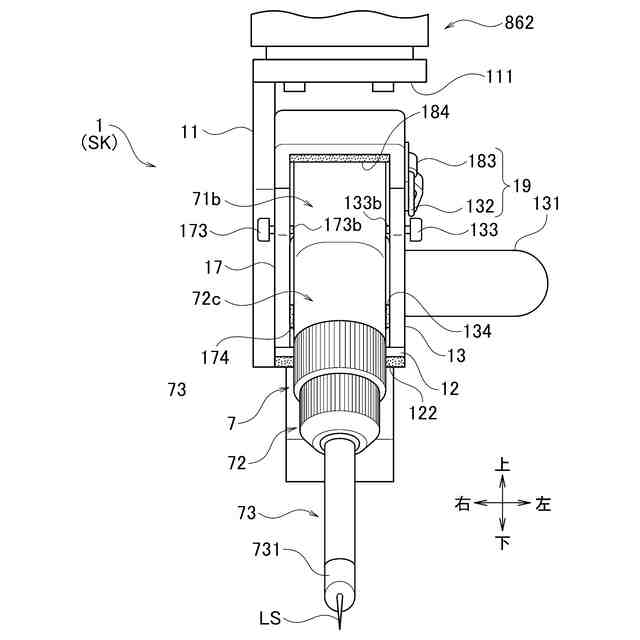
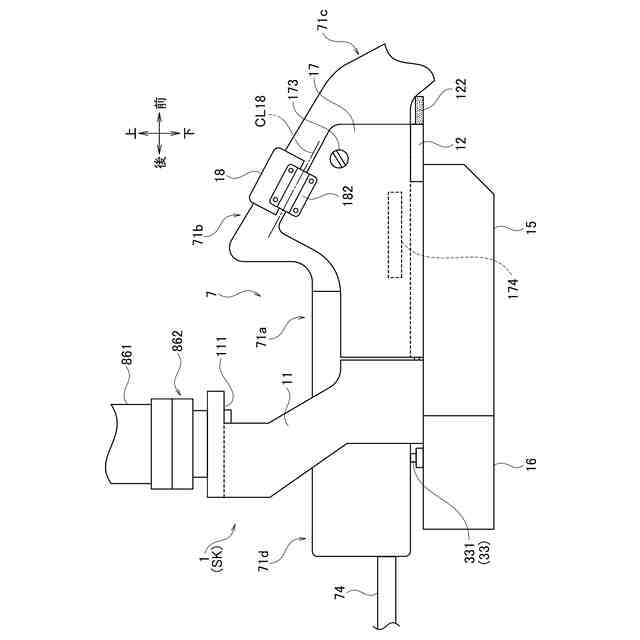
図4Aは、トーチ装着部1にトーチ7を装着した状態を示す左側面図である。
図4Bは、トーチ装着部1にトーチ7を装着した状態を示す右側面図である。
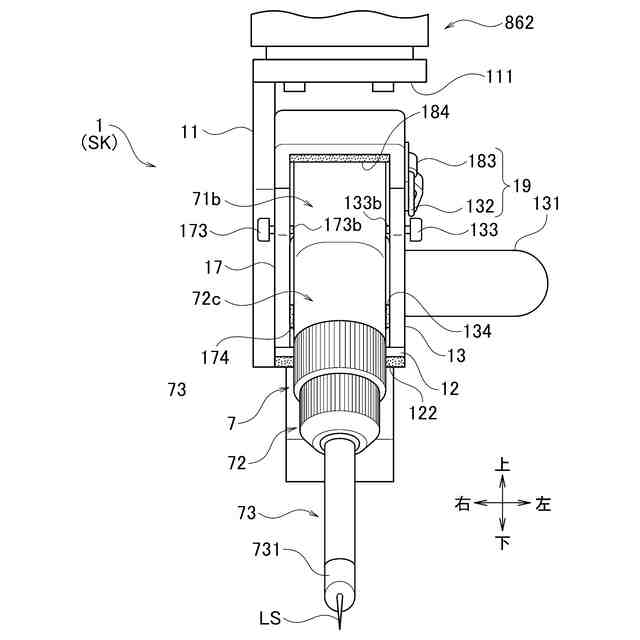
図4Cは、トーチ装着部1にトーチ7を装着した状態を示す前面図である。
図5Aは、トーチ装着部1によってトーチ7に付与される力を示す模式的左側面図である。
図5Bは、トーチ装着部1によってトーチ7に付与される力を示す前面図である。
図6は、トーチ7及びトーチ制御部62の構成を示すブロック図である。
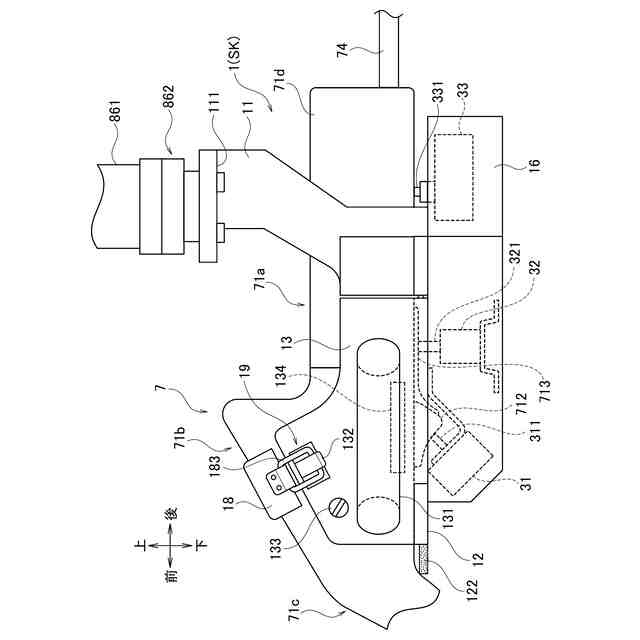
図7は、変形例のトーチ装着部1Aを説明するための左側面図である。
【発明を実施するための形態】
【0009】
本発明のハンディ溶接トーチ装着構造の一態様であるハンディ溶接トーチ装着構造SKを備えたトーチ装着部1によって説明する。トーチ装着部1は、例えば、図1に示されるようなレーザ溶接ルーム8STの多関節ロボット86の腕に取り付けられて用いられる。
【0010】
図1は、本発明のハンディ溶接トーチの装着構造の一態様であるハンディ溶接トーチ装着構造SKによりハンディ溶接トーチ7を装着した多関節ロボット86を収容したレーザ溶接ルーム8STを示す模式図である。レーザ溶接ルーム8STは、ドア811を有するパーテーション81によって区画され、レーザビームの外部への漏出が防止された部屋である。以下、ハンディ溶接トーチ7を単にトーチ7とも称する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
他の特許を見る
 特許ウォッチ
特許ウォッチ