TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025040369
公報種別
公開特許公報(A)
公開日
2025-03-24
出願番号
2023213859
出願日
2023-12-19
発明の名称
水中移動装置を充電する無線充電方法及び充電装置
出願人
先鋒材料科技股ふん有限公司
,
PIONEER MATERIAL PRECISION TECH CO., LTD.
代理人
弁理士法人三枝国際特許事務所
主分類
H02J
7/00 20060101AFI20250314BHJP(電力の発電,変換,配電)
要約
【課題】水中移動装置を充電する無線充電方法を提供する。
【解決手段】無線
充電
方法は、充電装置により実行され、充電装置及び水中移動装置は、無線充電技術及び水中無線通信技術に対応する。充電装置が、水中無線通信技術を用いて、水中移動装置と通信することにより、水中移動装置の移動装置情報を得るステップと、水中移動装置が充電位置に保持された後に位置決め成功信号を生成するステップと、位置決め成功信号が生成されると、移動装置情報に基づいて、無線充電技術を用いて、ケーブルから受け取った電力を用いて、水中移動装置にパワーを送ることによって、水中移動装置を充電するステップと、を含む。
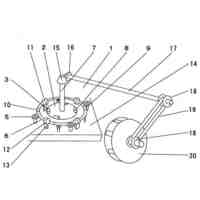
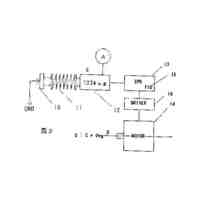
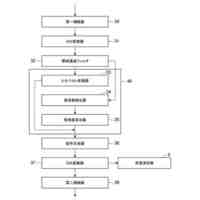
【選択図】図2
特許請求の範囲
【請求項1】
水中移動装置を充電する無線充電方法であって、前記無線充電方法は、充電装置により実行され、
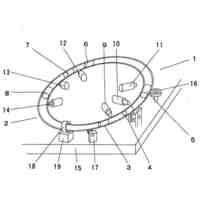
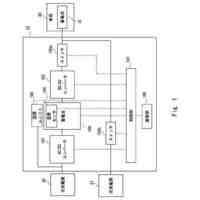
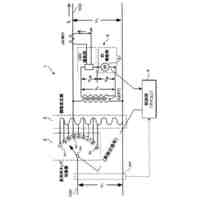
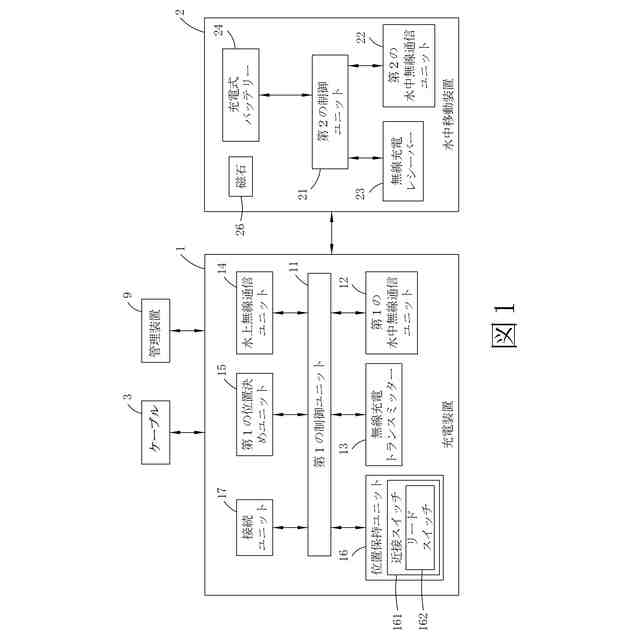
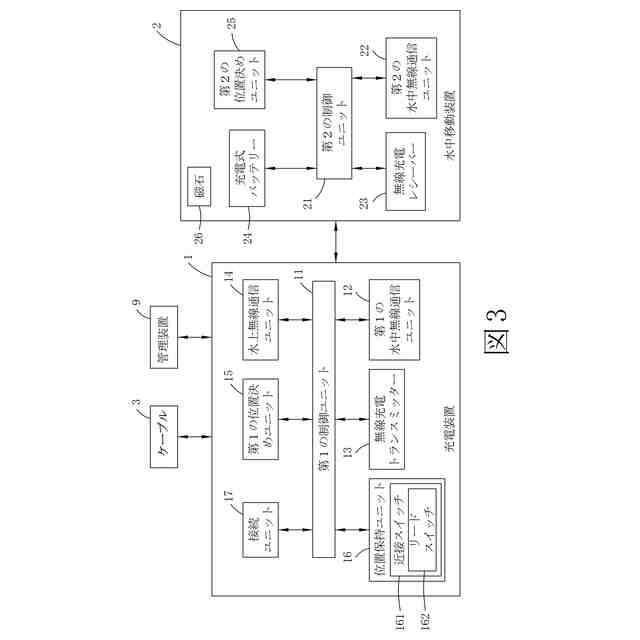
前記充電装置は、ケーブルから電力を受け取り、第1の制御ユニットと、第1の水中無線通信ユニットと、無線充電トランスミッターと、位置保持ユニットと、を含み、前記第1の制御ユニットは、前記第1の水中無線通信ユニットと前記無線充電トランスミッターと前記位置保持ユニットと電気的に接続し、
前記水中移動装置は、第2の水中無線通信ユニットと、無線充電レシーバーと、充電式バッテリーと、を含み、
前記第1の水中無線通信ユニット及び前記第2の水中無線通信ユニットは、水中無線通信技術に対応し、前記無線充電トランスミッター及び前記無線充電レシーバーは、無線充電技術に対応し、
前記無線通信方法は、
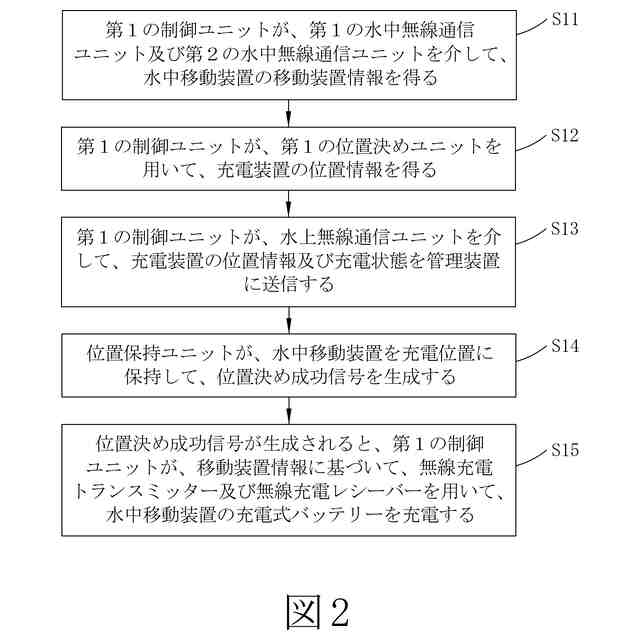
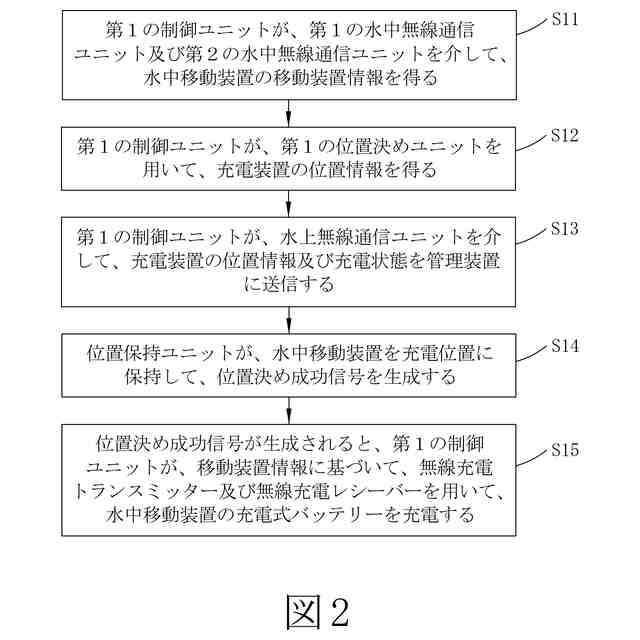
前記第1の制御ユニットが、前記第1の水中無線通信ユニットを介して前記水中無線通信技術を用いて前記第2の水中無線通信ユニットと通信することにより、前記水中移動装置の移動装置情報を得るステップと、
前記位置保持ユニットが、前記水中移動装置を充電位置に保持し、前記水中移動装置が前記充電位置に保持された後に位置決め成功信号を生成するステップと、
前記位置決め成功信号が生成されると、前記第1の制御ユニットが、前記移動装置情報に基づいて、前記無線充電トランスミッターを制御して、前記無線充電技術により、前記ケーブルから受け取った前記電力を用いて、前記無線充電レシーバーにパワーを送ることによって、前記充電式バッテリーを充電するステップと、を含む、
無線充電方法。
続きを表示(約 2,300 文字)
【請求項2】
前記充電装置は、前記第1の制御ユニットに電気的に接続し、陸上無線通信技術に対応する水上無線通信ユニットをさらに含み、
前記無線通信方法は、前記第1の制御ユニットが、前記水上無線通信ユニットを介して、前記陸上無線通信技術により、前記充電装置の充電装置情報を前記陸上無線通信技術に対応する管理装置に送信するステップをさらに含む、
請求項1に記載の無線充電方法。
【請求項3】
前記充電装置は、前記第1の制御ユニットに電気的に接続する第1の位置決めユニットをさらに含み、
前記無線充電方法は、前記第1の制御ユニットが、前記第1の位置決めユニットを用いて、前記充電装置の位置情報を得るステップをさらに含み、前記充電装置情報は、前記充電装置の前記位置情報と、前記充電装置が前記水中移動装置を充電しているかどうかを示す充電状態と、を含む、
請求項2に記載の無線充電方法。
【請求項4】
前記水中移動装置は、第2の制御ユニット及び前記第2の位置決めユニットをさらに含み、前記第2の制御ユニットは、前記第2の水中無線通信ユニットと前記無線充電レシーバーと前記充電式バッテリーと前記第2の位置決めユニットに電気的に接続し、
前記無線充電方法は、さらに前記水中移動装置により実行され、
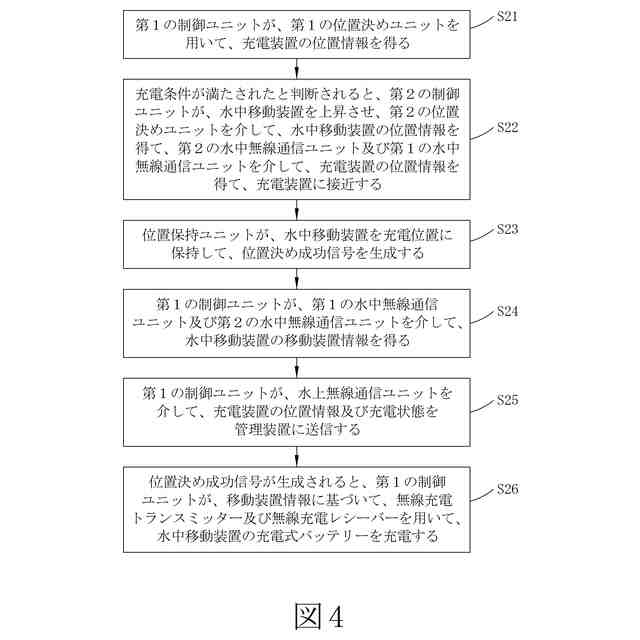
充電条件が満たされたと判断されると、前記第2の制御ユニットが、前記水中移動装置を制御して上昇させ、前記第2の位置決めユニットを介して前記水中移動装置の位置情報を得るステップと、
前記第2の制御ユニットが、前記第2の水中無線通信ユニットを介して前記水中無線通信技術を用いて前記第1の水中無線通信ユニットと通信することにより、前記充電装置の前記位置情報を得るステップと、
前記第2の制御ユニットが、前記水中移動装置の前記位置情報及び前記充電装置の前記位置情報に基づいて、前記水中移動装置を制御して移動させて前記充電装置に接近させるステップと、をさらに含む、
請求項3に記載の無線充電方法。
【請求項5】
前記第1の位置決めユニットは、全地球測位システム(GPS)、超広帯域無線システム(UWB)、及びブルートゥース(登録商標)のうちの1つに対応し、
前記充電装置の前記位置情報は、前記第1の位置決めユニットが全地球測位システム(GPS)、超広帯域無線システム(UWB)、及びブルートゥース(登録商標)のうちの1つを用いることにより得られ、
前記陸上無線通信技術は、Wi-Fi、第4世代移動通信システム(4G)、及び第5世代移動通信システム(5G)のうちの1つを用いる、
請求項3に記載の無線充電方法。
【請求項6】
前記水中無線通信技術は、超音波およびLoRa(Long Range)無線通信方式における電波のうちの1つを伝送媒体として用いる、請求項1に記載の無線充電方法。
【請求項7】
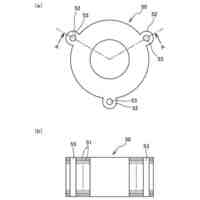
前記水中移動装置は、磁石をさらに含み、
前記位置保持ユニットは、近接スイッチを含み、前記近接スイッチは、リードスイッチを含み、
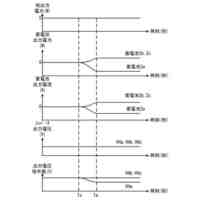
前記水中移動装置が前記充電位置に保持される際に、前記磁石が前記リードスイッチを非導通位置から導通位置に駆動することによって、前記位置保持ユニットは前記位置決め成功信号を生成する、
請求項1に記載の無線充電方法。
【請求項8】
前記無線充電技術は、Qi規格、A4WP(Alliance for Wireless Power)が策定した規格、及びPMA(Power Matters Alliance)が策定した規格のうちの1つに従う、請求項1に記載の無線充電方法。
【請求項9】
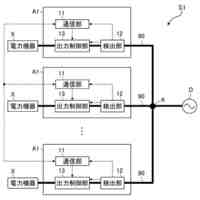
前記充電装置は、前記第1の制御ユニットに電気的に接続し、他のケーブルを介して他の充電装置の接続ユニットに電気的に接続する接続ユニットをさらに含み、
前記無線充電方法は、前記第1の制御ユニットが、前記接続ユニット及び前記他のケーブルを介して、前記他の充電装置に前記ケーブルから受け取った前記電力を送るステップ、をさらに含む、
請求項1に記載の無線充電方法。
【請求項10】
水中無線通信技術及び無線充電技術に対応する水中移動装置を充電するように構成される充電装置であって、
前記充電装置は、ケーブルから電力を受け取り、制御ユニットと、前記水中無線通信技術に対応する水中無線通信ユニットと、前記無線充電技術に対応する無線充電トランスミッターと、位置保持ユニットと、を含み、前記制御ユニットは、前記水中無線通信ユニットと前記無線充電トランスミッターと前記位置保持ユニットと電気的に接続し、
前記位置保持ユニットは、前記水中移動装置を充電位置に保持し、前記水中移動装置が前記充電位置に保持される後に位置決め成功信号を生成するように構成され、
前記制御ユニットは、
前記水中無線通信ユニットを介して前記水中無線通信技術を用いて、前記水中移動装置の移動装置情報を得て、
前記位置保持ユニットにより前記位置決め成功信号が生成されると、前記移動装置情報に基づいて、前記無線充電トランスミッターを制御して、前記無線充電技術により、前記ケーブルから受け取った前記電力を用いて、前記水中移動装置にパワーを送ることによって、前記水中移動装置を充電するように構成される、
充電装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
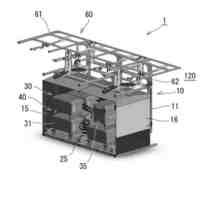
本発明は、水中移動装置を充電する無線充電方法に関し、特に、水面に浮かぶ充電装置を用いて水中移動装置を充電する無線充電方法に関する。本発明は、水中移動装置を充電する充電装置にさらに関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
無線自律型無人潜水機(AUV)は、広範囲の水中エリアで様々な水中活動(例えば、水中探査、水中測量)を行うことができる。一方、無線AUVはケーブルを含まないため、親船からケーブルを介して電力を提供するよう操作することができない。観賞用の生体模倣水中ロボット(例えば生体模倣ロボット魚)も同様である。従って、従来の無線AUVまたは生体模倣ロボット魚は、パワーが切れる前に、指定の場所に移動して水面に浮上し、外部のケーブルに電気的に接続することにより充電しなくてはいけない。
【先行技術文献】
【特許文献】
【0003】
米国特許第7077072号明細書
【発明の概要】
【発明が解決しようとする課題】
【0004】
従って、本発明の目的は、従来技術の欠点を少なくとも1つ軽減することができる水中移動装置を充電する無線充電方法及び充電装置を提供することにある。
【課題を解決するための手段】
【0005】
水中移動装置を充電する無線充電方法は、充電装置により実行される。
【0006】
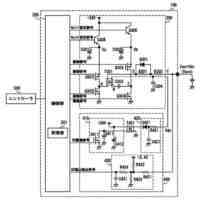
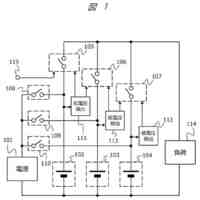
充電装置は、ケーブルから電力を受け取り、第1の制御ユニットと、第1の水中無線通信ユニットと、無線充電トランスミッターと、位置保持ユニットと、を含む。第1の制御ユニットは、第1の水中無線通信ユニットと無線充電トランスミッターと位置保持ユニットと電気的に接続する。
【0007】
水中移動装置は、第2の水中無線通信ユニットと、無線充電レシーバーと、充電式バッテリーと、を含む。
【0008】
第1の水中無線通信ユニット及び第2の水中無線通信ユニットは、水中無線通信技術に対応する。無線充電トランスミッター及び無線充電レシーバーは、無線充電技術に対応する。
【0009】
無線通信方法は、第1の制御ユニットが、第1の水中無線通信ユニットを介して第2の水中無線通信ユニットと通信することにより、水中移動装置の移動装置情報を得るステップと、位置保持ユニットが、水中移動装置を充電位置に保持し、水中移動装置が充電位置に保持された後に位置決め成功信号を生成するステップと、位置決め成功信号が生成されると、第1の制御ユニットが、移動装置情報に基づいて、無線充電トランスミッターを制御して、ケーブルから受け取った電力を用いて、無線充電レシーバーにパワーを送ることによって、充電式バッテリーを充電するステップと、を含む。
【0010】
充電装置は、水中無線通信技術及び無線充電技術に対応する水中移動装置を充電するように構成され、ケーブルから電力を受け取り、制御ユニットと、水中無線通信技術に対応する水中無線通信ユニットと、無線充電技術に対応する無線充電トランスミッターと、位置保持ユニットと、を含む。制御ユニットは、水中無線通信ユニットと無線充電トランスミッターと位置保持ユニットと電気的に接続する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
発電機
20日前
個人
発電機
16日前
ニデック株式会社
モータ
12日前
西芝電機株式会社
回転電機
2日前
富士電機株式会社
半導体装置
20日前
トヨタ自動車株式会社
充電システム
1日前
株式会社シマノ
電力供給装置
21日前
株式会社アイドゥス企画
負荷追従電動モータ
6日前
トヨタ自動車株式会社
蓄電池制御装置
22日前
ミネベアミツミ株式会社
モータ
1日前
新光電子株式会社
発振器
1日前
株式会社ダイヘン
電圧調整装置
12日前
ダイハツ工業株式会社
モータ製造装置
5日前
株式会社ダイヘン
電力システム
22日前
株式会社ゲットクリーンエナジー
発電機
13日前
株式会社アイシン
回転電機用ステータ製造方法
7日前
株式会社デンソー
電気機器
1日前
株式会社アイドゥス企画
磁力トルクコンバータ
6日前
ミネベアミツミ株式会社
発電装置
1日前
ミネベアミツミ株式会社
発電装置
1日前
トヨタ紡織株式会社
磁石挿入装置
12日前
株式会社アイシン
回転電機用ステータ製造方法
7日前
トヨタ自動車株式会社
充電制御装置
20日前
GX株式会社
可搬式太陽光発電用電源装置
20日前
日本精工株式会社
モータ
今日
株式会社ダイヘン
無線給電システム
12日前
キヤノン株式会社
電源装置、画像形成装置
21日前
株式会社豊田自動織機
回転電機
12日前
株式会社アイシン
車載制御装置
1日前
株式会社日立製作所
回転電機
1日前
マクセル株式会社
電池の放電装置
2日前
株式会社デンソー
電力変換装置
13日前
株式会社TMEIC
電力変換装置
2日前
個人
同期回転電機
27日前
株式会社キャップ
アキシャルギャップモータ
16日前
株式会社TMEIC
電力変換装置
5日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ