TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025033007
公報種別
公開特許公報(A)
公開日
2025-03-12
出願番号
2024145943
出願日
2024-08-27
発明の名称
学習装置、学習方法、およびプログラム
出願人
本田技研工業株式会社
,
センスタイム グループ リミテッド
代理人
個人
,
個人
,
個人
主分類
G06T
7/00 20170101AFI20250305BHJP(計算;計数)
要約
【課題】画像から検出された道路領域を複数の観点から検証することによって、その正確性を担保すること。
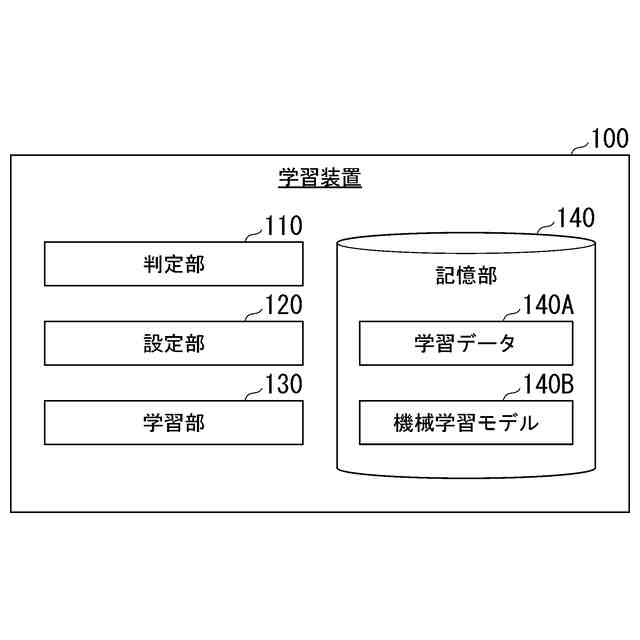
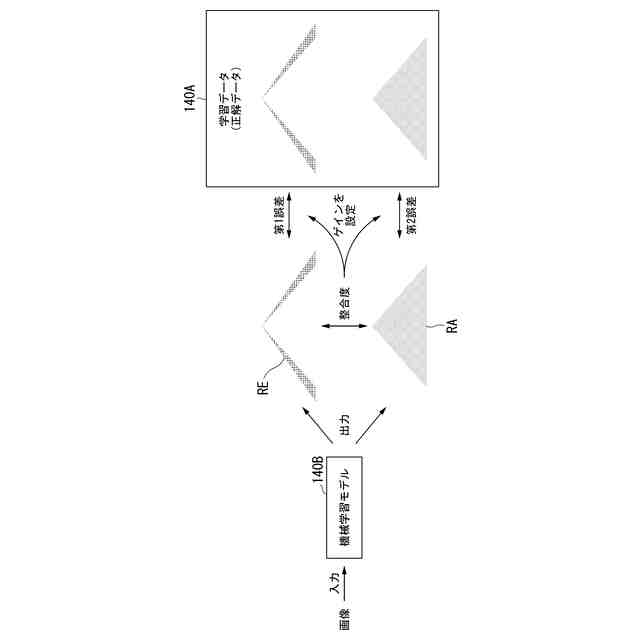
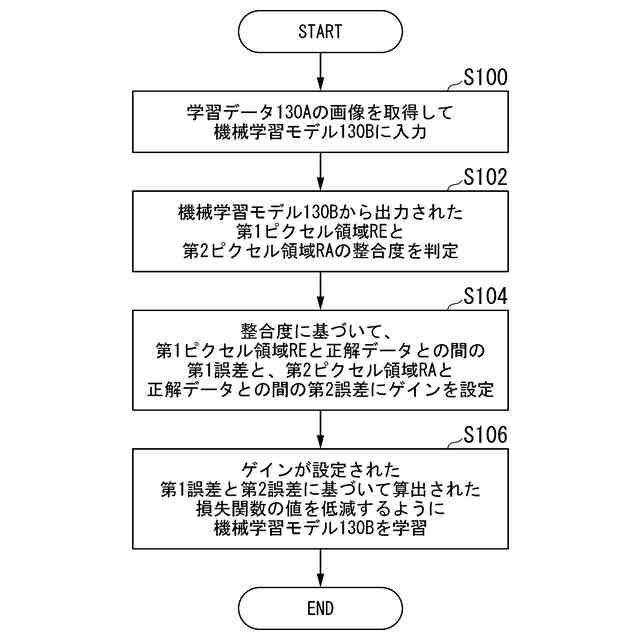
【解決手段】画像を入力として、前記画像のうち道路端を表す第1ピクセル領域と道路領域を表す第2ピクセル領域とを出力する機械学習モデルを学習する学習装置であって、前記第1ピクセル領域と前記第2ピクセル領域とを比較して、前記第1ピクセル領域と前記第2ピクセル領域の整合度を判定する判定部と、前記整合度に基づいて、出力された前記第1ピクセル領域と前記道路端を表す正解データとの間の第1誤差と、出力された前記第2ピクセル領域と前記道路領域を表す正解データとの間の第2誤差にゲインを設定する設定部と、前記ゲインが設定された前記第1誤差と前記第2誤差に基づいて算出された損失関数の値を低減するように前記機械学習モデルを学習する学習部と、を備える、学習装置。
【選択図】図1
特許請求の範囲
【請求項1】
画像を入力として、前記画像のうち道路端を表す第1ピクセル領域と道路領域を表す第2ピクセル領域とを出力する機械学習モデルを学習する学習装置であって、
前記第1ピクセル領域と前記第2ピクセル領域とを比較して、前記第1ピクセル領域と前記第2ピクセル領域の整合度を判定する判定部と、
前記整合度に基づいて、出力された前記第1ピクセル領域と前記道路端を表す正解データとの間の第1誤差と、出力された前記第2ピクセル領域と前記道路領域を表す正解データとの間の第2誤差にゲインを設定する設定部と、
前記ゲインが設定された前記第1誤差と前記第2誤差に基づいて算出された損失関数の値を低減するように前記機械学習モデルを学習する学習部と、を備える、
学習装置。
続きを表示(約 860 文字)
【請求項2】
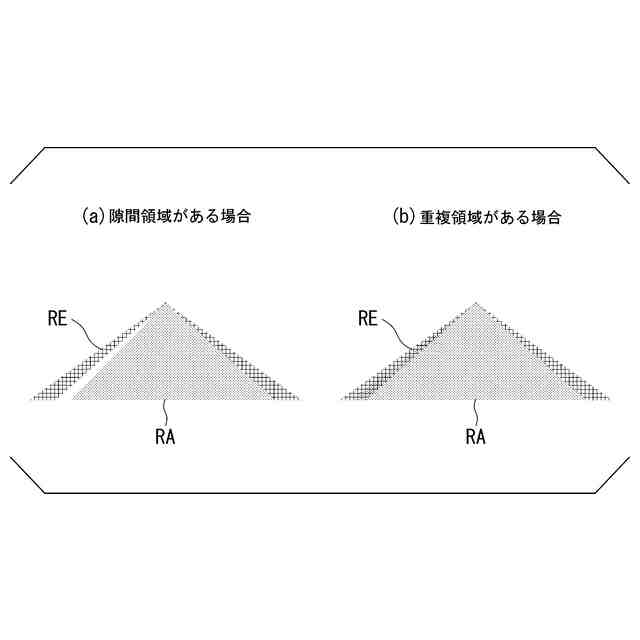
前記判定部は、前記第2ピクセル領域が前記第1ピクセル領域によって隙間なく、かつ重複なく挟まれているほど、前記整合度が高いと判定する、
請求項1に記載の学習装置。
【請求項3】
前記設定部は、判定された前記整合度が低いほど、設定する前記ゲインの値を大きくする、
請求項1又は2に記載の学習装置。
【請求項4】
画像を入力として、前記画像のうち道路端を表す第1ピクセル領域と道路領域を表す第2ピクセル領域とを出力する機械学習モデルを学習する学習方法であって、コンピュータが、
前記第1ピクセル領域と前記第2ピクセル領域とを比較して、前記第1ピクセル領域と前記第2ピクセル領域の整合度を判定し、
前記整合度に基づいて、出力された前記第1ピクセル領域と前記道路端を表す正解データとの間の第1誤差と、出力された前記第2ピクセル領域と前記道路領域を表す正解データとの間の第2誤差にゲインを設定し、
前記ゲインが設定された前記第1誤差と前記第2誤差に基づいて算出された損失関数の値を低減するように前記機械学習モデルを学習する、
学習方法。
【請求項5】
画像を入力として、前記画像のうち道路端を表す第1ピクセル領域と道路領域を表す第2ピクセル領域とを出力する機械学習モデルを学習させるプログラムであって、コンピュータに、
前記第1ピクセル領域と前記第2ピクセル領域とを比較して、前記第1ピクセル領域と前記第2ピクセル領域の整合度を判定させ、
前記整合度に基づいて、出力された前記第1ピクセル領域と前記道路端を表す正解データとの間の第1誤差と、出力された前記第2ピクセル領域と前記道路領域を表す正解データとの間の第2誤差にゲインを設定させ、
前記ゲインが設定された前記第1誤差と前記第2誤差に基づいて算出された損失関数の値を低減するように前記機械学習モデルを学習させる、
プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、学習装置、学習方法、およびプログラムに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
従来、車両の運転支援又は自動運転に活用するために、画像に含まれる道路領域を検出する技術が知られている。例えば、特許文献1には、入力された画像をx方向にスキャンして、エッジを抽出し、当該エッジ付近での色の違いに基づいて白線を検出することによって道路領域を検出する技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2020-038101号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に記載の技術では、スキャンによって検出された白線の正確性を異なる観点から検証するものではない。その結果、従来技術では、画像から検出された道路領域の正確性を担保することができない場合があった。
【0005】
本発明は、このような事情を考慮してなされたものであり、画像から検出された道路領域を複数の観点から検証することによって、その正確性を担保することができる学習装置、学習方法、およびプログラムを提供することを目的の一つとする。
【課題を解決するための手段】
【0006】
この発明に係る学習装置、学習方法、およびプログラムは、以下の構成を採用した。
(1):この発明の一態様に係る学習装置は、画像を入力として、前記画像のうち道路端を表す第1ピクセル領域と道路領域を表す第2ピクセル領域とを出力する機械学習モデルを学習する学習装置であって、前記第1ピクセル領域と前記第2ピクセル領域とを比較して、前記第1ピクセル領域と前記第2ピクセル領域の整合度を判定する判定部と、前記整合度に基づいて、出力された前記第1ピクセル領域と前記道路端を表す正解データとの間の第1誤差と、出力された前記第2ピクセル領域と前記道路領域を表す正解データとの間の第2誤差にゲインを設定する設定部と、前記ゲインが設定された前記第1誤差と前記第2誤差に基づいて算出された損失関数の値を低減するように前記機械学習モデルを学習する学習部と、を備えるものである。
【0007】
(2):上記(1)の態様において、前記判定部は、前記第2ピクセル領域が前記第1ピクセル領域によって隙間なく、かつ重複なく挟まれているほど、前記整合度が高いと判定するものである。
【0008】
(3):上記(1)又は(2)の態様において、前記設定部は、判定された前記整合度が低いほど、設定する前記ゲインの値を大きくするものである。
【0009】
(4):この発明の別の態様に係る学習方法は、画像を入力として、前記画像のうち道路端を表す第1ピクセル領域と道路領域を表す第2ピクセル領域とを出力する機械学習モデルを学習する学習方法であって、コンピュータが、前記第1ピクセル領域と前記第2ピクセル領域とを比較して、前記第2ピクセル領域が前記第1ピクセル領域によって挟まれているかを判定し、前記整合度に基づいて、出力された前記第1ピクセル領域と前記道路端を表す正解データとの間の第1誤差と、出力された前記第2ピクセル領域と前記道路領域を表す正解データとの間の第2誤差にゲインを設定し、前記ゲインが設定された前記第1誤差と前記第2誤差に基づいて算出された損失関数の値を低減するように前記機械学習モデルを学習するものである。
【0010】
(5):この発明の別の態様に係るプログラムは、画像を入力として、前記画像のうち道路端を表す第1ピクセル領域と道路領域を表す第2ピクセル領域とを出力する機械学習モデルを学習させるプログラムであって、コンピュータに、前記第1ピクセル領域と前記第2ピクセル領域とを比較して、前記第2ピクセル領域が前記第1ピクセル領域によって挟まれているかを判定させ、前記整合度に基づいて、出力された前記第1ピクセル領域と前記道路端を表す正解データとの間の第1誤差と、出力された前記第2ピクセル領域と前記道路領域を表す正解データとの間の第2誤差にゲインを設定させ、前記ゲインが設定された前記第1誤差と前記第2誤差に基づいて算出された損失関数の値を低減するように前記機械学習モデルを学習させるものである。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
他の特許を見る

 特許ウォッチ
特許ウォッチ