TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025030719
公報種別
公開特許公報(A)
公開日
2025-03-07
出願番号
2023136259
出願日
2023-08-24
発明の名称
サスペンション制御システム
出願人
トヨタ自動車株式会社
代理人
個人
,
個人
,
個人
主分類
B60G
17/015 20060101AFI20250228BHJP(車両一般)
要約
【課題】路面変位関連値の有無の境界での振動や横力の発生を抑制できるサスペンション制御システムを提供する。
【解決手段】サスペンション制御システム10において、アクチュエータは、車両の制御対象輪のサスペンションストロークを調整する。取得部80は、路面の上下方向の変位に関連する路面変位関連値と位置とが関連付けられている路面データマップから、現在時刻から所定時間後の制御対象輪の予測通過位置における路面変位関連値を取得する。演算部86は、取得された路面変位関連値にもとづいて目標制御力を演算する。制御部88は、制御対象輪が予測通過位置を通過する時にアクチュエータが発生する制御力が目標制御力に一致するように、当該アクチュエータを制御する。演算部86は、車両のウィンカが動作を開始すると、ウィンカが動作していない場合と比較して目標制御力の単位時間あたりの変化量が小さくなるように、目標制御力を演算する。
【選択図】図4
特許請求の範囲
【請求項1】
車両の制御対象輪のサスペンションストロークを調整するアクチュエータと、
前記アクチュエータを制御する制御装置と、
を備え、
前記制御装置は、
路面の上下方向の変位に関連する路面変位関連値と位置とが関連付けられている路面データマップから、現在時刻から所定時間後の前記制御対象輪の予測通過位置における路面変位関連値を取得する取得部と、
取得された路面変位関連値にもとづいて目標制御力を演算する演算部と、
前記制御対象輪が前記予測通過位置を通過する時に前記アクチュエータが発生する制御力が前記目標制御力に一致するように、当該アクチュエータを制御する制御部と、
を有し、
前記演算部は、前記車両のウィンカが動作を開始すると、当該ウィンカが動作していない場合と比較して前記目標制御力の単位時間あたりの変化量が小さくなるように、当該目標制御力を演算する、
ことを特徴とするサスペンション制御システム。
続きを表示(約 860 文字)
【請求項2】
前記演算部は、
取得された路面変位関連値とゲインにもとづいて前記目標制御力を演算し、
前記ウィンカが動作していない場合、前記ゲインを基準値に設定し、
前記ウィンカが動作を開始すると、前記ゲインを前記基準値から徐々に小さくし、
前記ウィンカが動作を終了すると、前記ゲインを前記基準値まで徐々に大きくする、
ことを特徴とする請求項1に記載のサスペンション制御システム。
【請求項3】
前記演算部は、前記ウィンカの動作中、または、当該ウィンカの動作中と当該ウィンカが動作を終了してから所定の制御時間の間、前記目標制御力の単位時間あたりの変化量を制限するように当該目標制御力を演算する、
ことを特徴とする請求項1に記載のサスペンション制御システム。
【請求項4】
前記制御装置は、前記ウィンカが動作を開始すると、前記車両がレーンチェンジするか、または、当該車両が右左折するか予測する予測部をさらに備え、
前記演算部は、前記車両がレーンチェンジすると予測された場合、当該車両が右左折すると予測された場合と比較して、前記目標制御力の単位時間あたりの変化量の低減量が大きくなるように、当該目標制御力を演算する、
ことを特徴とする請求項1から3のいずれかに記載のサスペンション制御システム。
【請求項5】
前記制御部は、前記アクチュエータを制御することにより、前記ばね上構造体の振動を低減するためのフィードバック制御をさらに実行し、
前記演算部は、
前記ウィンカが動作を開始すると、当該ウィンカが動作していない場合と比較して、フィードバック制御のフィードバックゲインを大きくし、
前記車両がレーンチェンジすると予測された場合、右左折すると予測された場合と比較して、前記フィードバックゲインを大きくする、
ことを特徴とする請求項4に記載のサスペンション制御システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、サスペンション制御システムに関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
特許文献1は、車両の制振制御装置を開示する。制振制御装置は、測定データに基いて、通過予測位置における路面変位関連値をプレビュー情報として取得し、プレビュー情報を用いて演算された第1目標制御力を含む最終目標制御力に基いて制御力発生装置を制御するプレビュー制振制御を実行する。測定データは、測定車両が路面を実際に走行したときに取得された路面変位関連値と、当該路面変位関連値が取得されたときの位置を表す位置情報とが関連付けられたデータを含む。制振制御装置は、路面状態が過去の時点から変化した蓋然性が高いと判定した場合、第1目標制御力の大きさを小さく設定する。
【先行技術文献】
【特許文献】
【0003】
特開2022-064361号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
プレビュー制振制御中の車両は、直進時と比較して、レーンチェンジ時または交差点の右左折時には、測定データのマップの路面変位関連値が無い場所を走行する確率が高まる。この場合、路面変位関連値の有無の境界で、路面変位関連値がある値からゼロに変化する。そのため、この境界で実際には路面に段差がない場合であっても、振動が発生する可能性がある。また、境界を跨ぐ際の制御により、ロールステア、キャンバ、接地点横変位等による横力がタイヤ接地面に発生し、横振動が発生したり、運転者の狙いの走行軌跡に対して差が生じたりする可能性がある。このような振動や横力の発生を抑制することが望まれる。
【0005】
本発明の目的は、路面変位関連値の有無の境界での振動や横力の発生を抑制できるサスペンション制御システムを提供することにある。
【課題を解決するための手段】
【0006】
上記課題を解決するために、本発明のある態様のサスペンション制御システムは、車両の制御対象輪のサスペンションストロークを調整するアクチュエータと、前記アクチュエータを制御する制御装置と、を備える。前記制御装置は、路面の上下方向の変位に関連する路面変位関連値と位置とが関連付けられている路面データマップから、現在時刻から所定時間後の前記制御対象輪の予測通過位置における路面変位関連値を取得する取得部と、取得された路面変位関連値にもとづいて目標制御力を演算する演算部と、前記制御対象輪が前記予測通過位置を通過する時に前記アクチュエータが発生する制御力が前記目標制御力に一致するように、当該アクチュエータを制御する制御部と、を有する。前記演算部は、前記車両のウィンカが動作を開始すると、当該ウィンカが動作していない場合と比較して前記目標制御力の単位時間あたりの変化量が小さくなるように、当該目標制御力を演算する。
【発明の効果】
【0007】
本発明によれば、路面変位関連値の有無の境界での振動や横力の発生を抑制できるサスペンション制御システムを提供できる。
【図面の簡単な説明】
【0008】
路面変位関連値のマップの一例を示す図である。
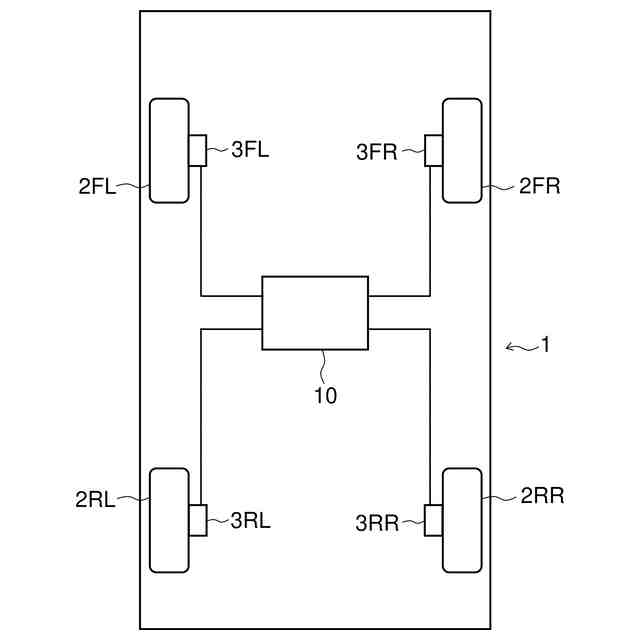
実施の形態の車両の構成を概略的に示す図である。
図2のサスペンションの構成を概略的に示す図である。
実施の形態のサスペンション制御システムの構成例を示すブロック図である。
実施の形態のマップ管理装置の構成例を示すブロック図である。
実施の形態のサスペンション制御処理を示すフローチャートである。
【発明を実施するための形態】
【0009】
実施の形態を具体的に説明する前に、基礎となった知見を説明する。既述のように、直進時と比較して、レーンチェンジ時または交差点の右左折時には、車両がマップの路面変位関連値が無い場所を走行する確率が高まる。
【0010】
図1は、路面変位関連値のマップの一例を示す。このマップでは、色の濃淡で路面変位関連値の大きさを表す。色の濃淡が均一な領域302は、マップがなく、路面変位関連値はゼロであることを表す。このマップは、直線道路の各レーンに沿って生成されている。領域300a,300b,300cは、それぞれ別のレーンに対応する。領域300a,300b,300c内では、マップがあり、路面変位関連値は各位置に設定されている。領域302は、領域300a,300b,300c以外の領域である。領域302内では、マップがなく、路面変位関連値は位置によらず一様にゼロである。この例では、隣り合う2つのレーンの間の領域302、すなわち領域300aと領域300bの間の領域302および領域300aと領域300cの間の領域302は、測定データを収集するための車両が過去に走行していないため、マップが存在しない。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
他の特許を見る





 特許ウォッチ
特許ウォッチ