TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025027463
公報種別
公開特許公報(A)
公開日
2025-02-27
出願番号
2024134941
出願日
2024-08-13
発明の名称
リアルタイム自律経路計画のためのコンピュータシステムおよび方法、ならびにロボットデバイスおよびその部分の動作を計画するためのシステムおよび方法
出願人
マクドナルド・デトワイラー・アンド・アソシエイツ・インコーポレイテッド
代理人
個人
,
個人
,
個人
主分類
B25J
9/10 20060101AFI20250219BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】許容可能な経路を効率的に計算することができるリアルタイム自律経路計画のためのシステム、方法、およびデバイスを提供する。
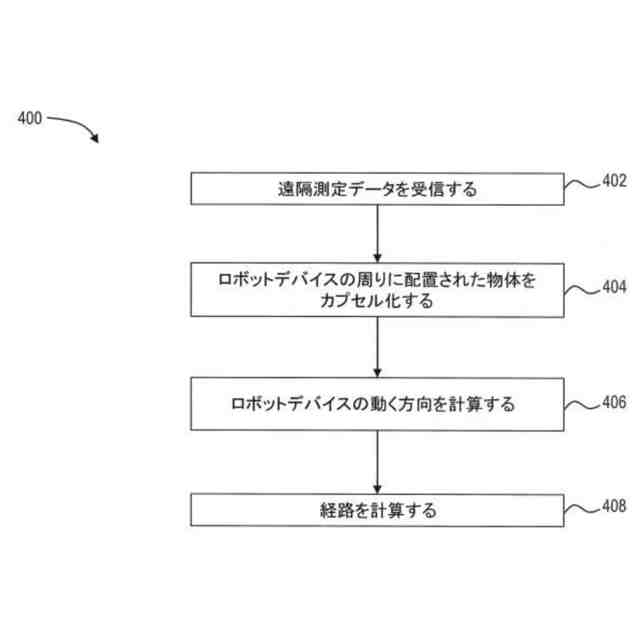
【解決手段】方法は、3次元作業空間内でロボットデバイスに関するデータを受信するステップと、ロボットデバイス、目標物、および障害物を含むロボットデバイスの環境内の物体をシミュレートされたロボット空間内にカプセル化するステップと、仮想引力、仮想斥力、および仮想斥力に関して少なくとも部分的に垂直に作用する仮想接線力を含む、3つの仮想力に従ってロボットデバイスの動く方向を計算するステップと、3次元作業空間内の各仮想力を、各関節におけるシミュレートされたロボット空間内のトルクベクトルにマッピングするステップと、トルクベクトルの総和を目標物に到達するための経路を定義するロボットデバイスのためのコマンドに変換するステップと、コマンドをロボットデバイスに送信するステップとを含む。
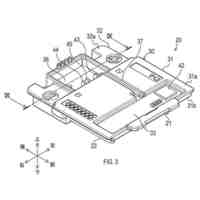
【選択図】図3
特許請求の範囲
【請求項1】
ロボットデバイスに対するリアルタイム自律経路計画の方法であって、
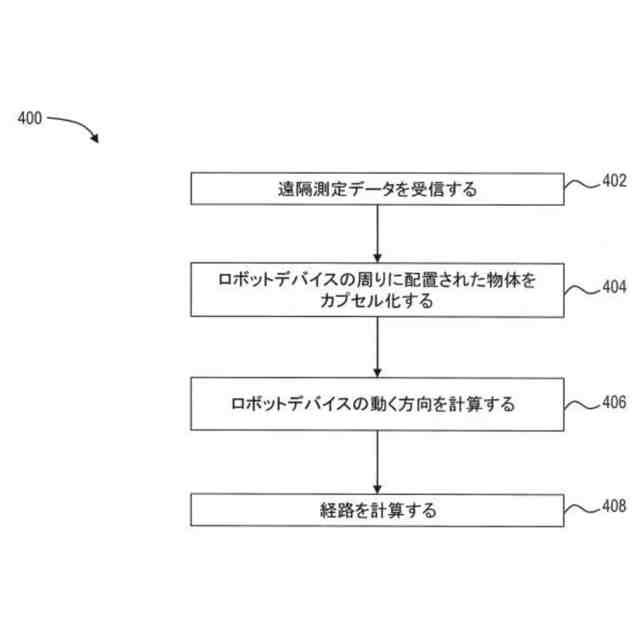
通信インターフェースデバイスによって、3次元作業空間内の、複数の関節を含む前記ロボットデバイスに関する遠隔測定データを受信するステップと、
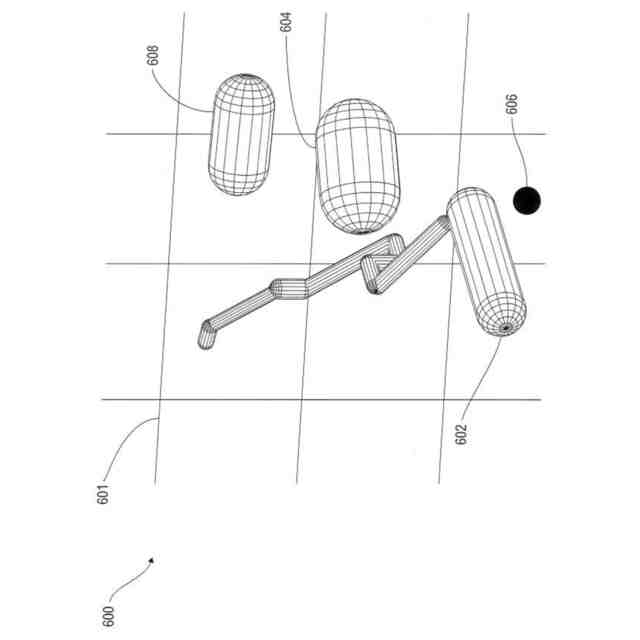
1つまたは複数のプロセッサによって、前記ロボットデバイス、目標物、および1つまたは複数の障害物を含む前記ロボットデバイスの環境内の物体を、複数の次元を有するシミュレートされたロボット空間内にカプセル化するステップと、
前記1つまたは複数のプロセッサによって、前記ロボットデバイスと前記目標物とを一緒に動かすように作用する仮想引力、前記ロボットデバイスと前記1つまたは複数の障害物とを互いから離れる方向に動かすように作用する仮想斥力、および前記仮想斥力に関して少なくとも部分的に垂直に作用する仮想接線力を含む、3つの仮想力による前記ロボットデバイスの動く方向を計算するステップと、
前記1つまたは複数のプロセッサによって、前記3次元作業空間内の各仮想力を、各関節における前記シミュレートされたロボット空間内のトルクベクトルにマッピングするステップと、
前記1つまたは複数のプロセッサによって、前記トルクベクトルの総和を前記ロボットデバイスのための1つまたは複数のコマンドに変換するステップであって、前記1つまたは複数のコマンドは、前記目標物に到達するための経路を定義する、ステップと、
前記通信インターフェースデバイスによって、前記1つまたは複数のコマンドを前記ロボットデバイスに送信するステップと
を含む、方法。
続きを表示(約 760 文字)
【請求項2】
前記ロボットデバイスが、前記1つまたは複数のコマンドによって定義された前記経路に沿って動いて前記目標物に到達するステップをさらに含む、請求項1に記載の方法。
【請求項3】
前記1つまたは複数の障害物および前記目標物は、前記ロボットデバイスに関して動的に動いている、請求項1に記載の方法。
【請求項4】
前記ロボットデバイスは、7個の関節を含み、前記シミュレートされたロボット空間は、7次元を有する、請求項1に記載の方法。
【請求項5】
前記ロボットデバイスは、3つの並進次元および3つの回転次元で動くように構成されたエンドエフェクタを含む、請求項1に記載の方法。
【請求項6】
宇宙船は、前記エンドエフェクタに対する前記目標物であり、前記ロボットデバイスの少なくとも1つの他の部分に対する障害物である、請求項5に記載の方法。
【請求項7】
前記方法は、前記ロボットデバイスにおいてローカルに実行される請求項1に記載の方法。
【請求項8】
前記経路は、前記ロボットデバイスが前記障害物と相互作用することなく前記目標物に到達するのに十分な最適化されていない経路である、請求項1に記載の方法。
【請求項9】
前記3次元作業空間内の各仮想力を、各関節における前記7次元のシミュレートされたロボット空間内の前記トルクベクトルにマッピングするステップは、転置ヤコビ行列を使用する、請求項4に記載の方法。
【請求項10】
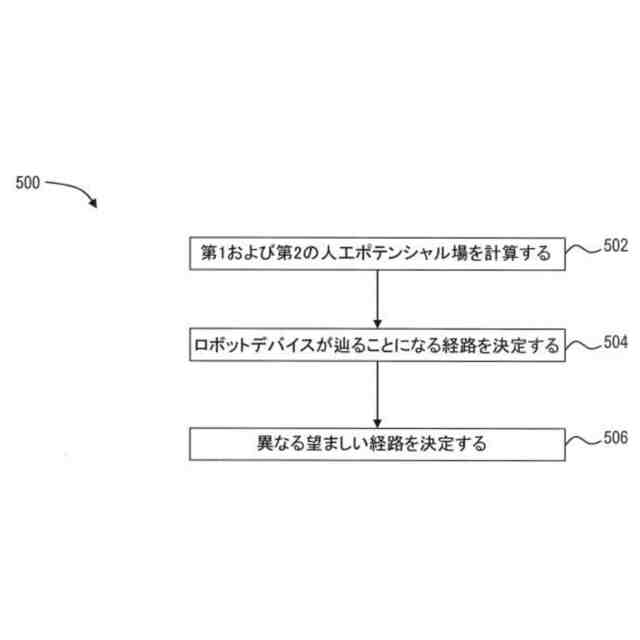
前記マッピングは、ポテンシャル場を使用して前記遠隔測定データを前記仮想力に変換することによって行われる、請求項1に記載の方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
以下は、一般に、ロボットデバイスのための経路計画アルゴリズムに関し、より具体的には、動的環境において使用するためのより高次元の経路計画アルゴリズムに関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
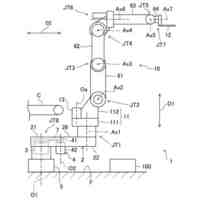
低次元環境における経路計画のためのアルゴリズムは、ロボットアーム、ロボット車両、またはマニピュレータなどのロボットまたはその一部が低次元環境内を辿るための、または動くための経路を計画するために使用される。多くの場合に、そのような従来のアルゴリズムの目的は、低次元環境を通る最適な経路、すなわち、任意の障害物または危険物を回避し、最適な方法で1つまたは複数の目標物を探索するルートを計算することである。
【0003】
経路計画、特に低次元環境における最適経路計画のためのそのようなアルゴリズムは、最適経路を計算するために莫大な計算リソースを必要とし、多くの場合において非効率的である。
【0004】
そのようなアルゴリズムは、ロボットまたはその一部が進路を補正するために、または動きを変更するために利用可能な自由度(「DoF」)が少ない低次元環境に適合されている。利用可能なDoFが少ないため、効率を犠牲にした最適性がこのようなアルゴリズムの特徴である。
【0005】
そのようなアルゴリズムは、回避されるべき障害物または危険物および探索されるべき目標物がロボットまたはその一部に関して典型的には動かない静的環境にさらに適合される。したがって、最適経路は、計算された後に、そのようなアルゴリズムによって再計算されることはありそうもない。したがって、そのようなアルゴリズムは、計算された経路をリアルタイムで更新することができない場合がある。
【0006】
軌道環境および宇宙空間では、重いコンポーネントを打ち上げること、ならびに困難な熱および放射線環境内に航空電子工学機器を配備することに関連する困難さおよびコストに起因して、経路計画のためのアルゴリズムの実装に利用可能な計算リソースが制限され得るプロセッサ制約状況があり得る。
【発明の概要】
【発明が解決しようとする課題】
【0007】
したがって、許容可能な経路を効率的に計算することができるリアルタイム自律経路計画(real-time autonomous path planning)のためのシステム、方法、およびデバイスが望まれている。
【0008】
したがって、既存のシステムおよび方法にある欠点の少なくともいくつかを克服する、リアルタイム自律経路計画のための改善されたシステムおよび方法、ならびにロボットデバイスおよびその部分の動作を計画するための改善されたシステムおよび方法が必要とされている。
【0009】
さらに、そのようなリアルタイム自律経路計画は、許容可能な経路を効率的に計算するために、ロボットまたはその部分に利用可能なより高い次元性(より高いDoF)を利用し得る。
【0010】
さらに、そのようなリアルタイム自律経路計画は、回避されるべき障害物および危険物、ならびに探索されるべき目標物がロボットに関して動くことができ、および動く動的環境内で行われ得る。しかしながら、そのようなリアルタイム自律経路計画は、静的環境においても行われ得る。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
腰袋
13日前
株式会社マキタ
電動工具
6日前
株式会社マキタ
電動工具
21日前
川崎重工業株式会社
ロボットアーム
21日前
川崎重工業株式会社
ロボットリスト
21日前
日本車輌製造株式会社
締め付け工具
21日前
川崎重工業株式会社
ロボットアーム
21日前
川崎重工業株式会社
ロボットシステム
21日前
日本信号株式会社
作業機制御システム
6日前
CKD株式会社
吸着型搬送装置
1か月前
株式会社安川電機
ロボット
1か月前
株式会社安川電機
ロボット
1か月前
株式会社京阪エンジニアリング
脱着装置
7日前
株式会社安川電機
ロボット
1か月前
ジヤトコ株式会社
圧入装置
1か月前
株式会社スター精機
ワーク搬送装置
10日前
トヨタ自動車株式会社
把持装置、把持方法
今日
株式会社マキタ
集塵アタッチメント
6日前
川崎重工業株式会社
ロボットシステム
13日前
工機ホールディングス株式会社
作業機
1か月前
トヨタ自動車株式会社
制御装置及び制御方法
21日前
工機ホールディングス株式会社
作業機
1か月前
モトコマ株式会社
寄せポンチホルダー
22日前
個人
ターンバックル用工具
28日前
有限会社松尾エンジニアリング
連結部材
22日前
株式会社DailyColor
ロボットハンド
22日前
株式会社SHIN‐JIGEN
上肢アシスト装置
27日前
株式会社マキタ
電動工具
13日前
株式会社マキタ
作業機
1か月前
株式会社マキタ
バッテリ駆動式機器
1か月前
株式会社マキタ
電動作業機
1か月前
株式会社マキタ
打ち込み工具
1か月前
川崎重工業株式会社
多関節ロボット
6日前
株式会社日本マイクロニクス
把持機構及び搬送装置
1か月前
株式会社安川電機
ロボット及び基板搬送装置
1か月前
馳逸自動化科技(蘇州)有限公司
物品ピッキングロボット
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ