TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025025455
公報種別
公開特許公報(A)
公開日
2025-02-21
出願番号
2023130230
出願日
2023-08-09
発明の名称
時刻同期システム、時刻同期プログラム、及び時刻同期方法
出願人
大成建設株式会社
代理人
園田・小林弁理士法人
主分類
G01H
17/00 20060101AFI20250214BHJP(測定;試験)
要約
【課題】自由度が高く、かつ簡易な処理又は方法により、複数の振動データ間における時刻同期の精度を確保可能な時刻同期システム、時刻同期プログラム、及び時刻同期方法を提供する。
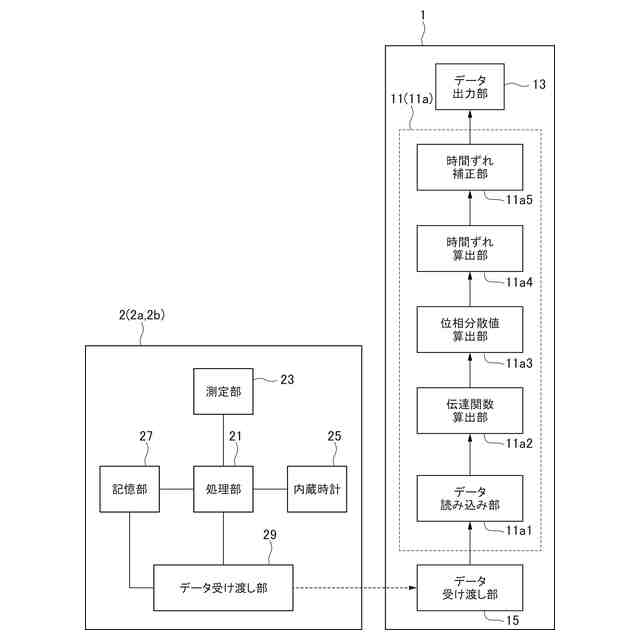
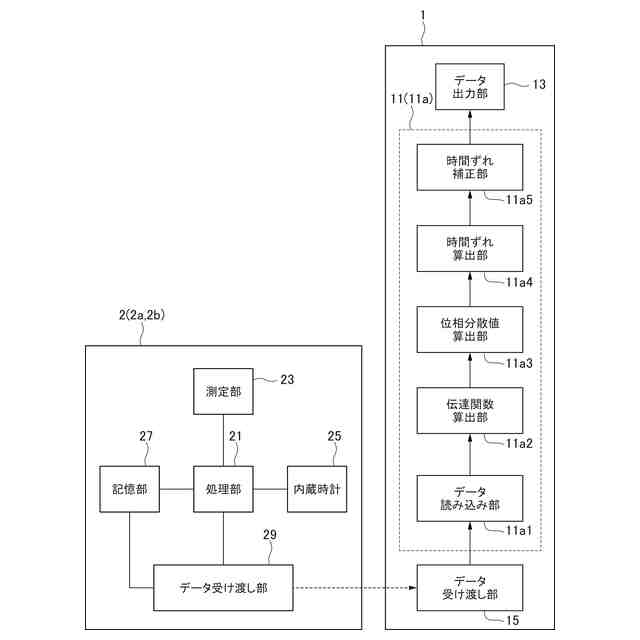
【解決手段】時刻同期システムは、振動が生じる構造物の別個の位置において取得される第1振動データ及び第2振動データを用いて、第1振動データと第2振動データとの間の時刻を同期させる。時刻同期システムは、第1振動データと第2振動データとの間の時間ずれの推定に用いられ、時間ずれの複数の仮推定値のうちの1つを各々が含む複数の推定伝達関数を順次算出し、時間ずれの複数の仮推定値のうち、推定伝達関数における位相値が0度及び180度の二値の方向に最も集中する前記時間ずれの仮推定値を、時刻を同期させるための第1最適値として決定する演算部を備える。時刻同期プログラム及び時刻同期方法は、上述に対応する構成を有する。
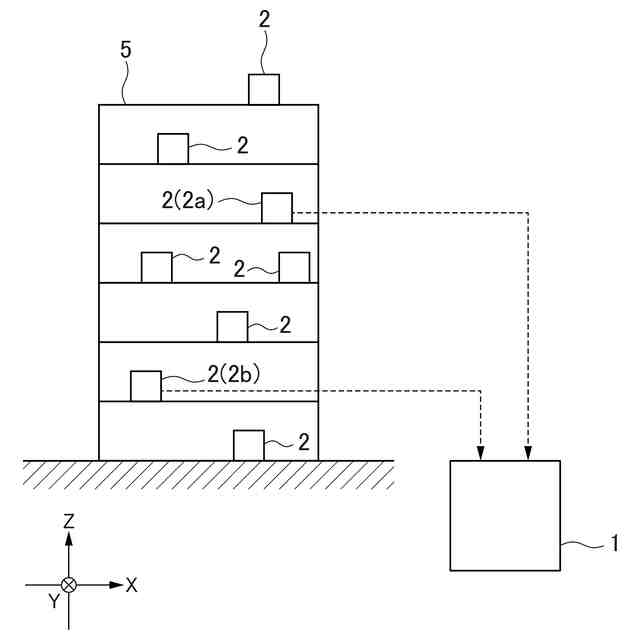
【選択図】図2
特許請求の範囲
【請求項1】
振動が生じる構造物の別個の位置において取得される第1振動データ及び第2振動データを用いて、前記第1振動データと前記第2振動データとの間の時刻を同期させる時刻同期システムであって、
前記第1振動データと前記第2振動データとの間の時間ずれの推定に用いられ、前記時間ずれの複数の仮推定値のうちの1つを各々が含む複数の推定伝達関数を順次算出し、
前記時間ずれの複数の仮推定値のうち、前記推定伝達関数における位相値が0度及び180度の二値の方向に最も集中する前記時間ずれの仮推定値を、前記時刻を同期させるための第1最適値として決定する
演算部を備える
時刻同期システム。
続きを表示(約 900 文字)
【請求項2】
前記演算部は、
前記第1最適値に基づき、前記第1振動データと前記第2振動データとの間の前記時刻を同期させ、
前記時刻を同期させた後の前記第1振動データと、前記時刻を同期させた後の前記第2振動データとの間のコヒーレンス値を算出し、
前記コヒーレンス値を用いて、複数の前記推定伝達関数における位相値を重みづけし、
前記時間ずれの複数の仮推定値のうち、前記位相値が0度及び180度の二値の方向に最も集中する前記時間ずれの仮推定値を、前記時刻を同期させるための第2最適値として決定する
請求項1に記載の時刻同期システム。
【請求項3】
振動が生じる構造物の別個の位置において取得される第1振動データ及び第2振動データを用いて、前記第1振動データと前記第2振動データとの間の時刻を同期させる時刻同期プログラムであって、
前記第1振動データと前記第2振動データとの間の時間ずれの推定に用いられ、前記時間ずれの複数の仮推定値のうちの1つを各々が含む複数の推定伝達関数を順次算出し、
前記時間ずれの複数の仮推定値のうち、前記推定伝達関数における位相値が0度及び180度の二値の方向に最も集中する前記時間ずれの仮推定値を、前記時刻を同期させるための第1最適値として決定する
時刻同期プログラム。
【請求項4】
振動が生じる構造物の別個の位置において取得される第1振動データ及び第2振動データを用いて、前記第1振動データと前記第2振動データとの間の時刻を同期させる時刻同期方法であって、
前記第1振動データと前記第2振動データとの間の時間ずれの推定に用いられ、前記時間ずれの複数の仮推定値のうちの1つを各々が含む複数の推定伝達関数を順次算出する工程と、
前記時間ずれの複数の仮推定値のうち、前記推定伝達関数における位相値が0度及び180度の二値の方向に最も集中する前記時間ずれの仮推定値を、前記時刻を同期させるための第1最適値として決定する工程と
を含む
時刻同期方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、振動が生じる構造物において取得された複数の振動データ間の時刻を同期させるための時刻同期システム、時刻同期プログラム、及び時刻同期方法に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
地震動等の振動が生じる建築構造物等の構造物に、振動を計測する複数の振動センサを設置する場合、複数の振動センサで取得される振動データの正確な解析を行うために、複数の振動センサ同士の時刻を同期させる必要がある。振動センサを搭載したセンサユニットには、振動が生じた時刻を特定するための内蔵時計が搭載されているが、内蔵時計の精度は高くなく、内蔵時計の時刻は時間経過とともにずれが生じる。内蔵時計の時刻を調整する方法としては、例えば、複数のセンサユニットを有線接続又は無線接続した通信環境を構築し、GPS(Global Positioning System)サーバ若しくはNTP(Network Time Protocol)サーバ、又は標準電波の送信局から送信される原子時計等を用いて、時刻調整を行う方法がある。
【0003】
しかしながら、有線接続又は無線接続により時刻調整を行う場合、電波障害、通信遅延等の通信環境の問題によって、高精度な時刻調整が担保されない場合がある。また、原子力発電所の建屋、又はスタジオ、MRI(Magnetic Resonance Image)室、若しくは実験室等の壁、床、若しくは天井等を電磁シールド構造とした空間のように、有線接続又は無線接続を問わず、通信環境を構築すること自体が困難な構造物も存在する。
【0004】
また、好適な通信環境を構造物に構築することが可能である場合でも、GPS等を受信するための装置等をセンサユニットに組み込むと、センサユニットにおける消費電力が大きくなる。そのため、センサユニットにおける外部電源の確保又は内部バッテリーの大容量化が必要となり、センサユニットの大型化又は運用コスト上昇に繋がる。また、有線接続においては配線工事が必要になる、無線接続においてはセンサ以外の親機、又は通信状況に応じた中継器が必要になるなど、センサ間を相互に接続することに伴うコストが発生する。
【0005】
したがって、振動データの解析においては、有線接続又は無線接続が可能であるか否かを問わず、振動データを取得した後に、複数の振動データの時刻同期を行う方法が、多く採用されている(例えば、特許文献1~3)。
【先行技術文献】
【特許文献】
【0006】
特開2007-327873号公報
特開2018-091824号公報
特開2018-100875号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
特許文献1においては、複数の地震計によって取得された地震記録データの立ち上がり部分の波形を抽出し、立ち上がり部分波形を相互に比較して時間ずれを算出し、各々の地震記録データの間の時刻同期を行う方法が開示されている。
【0008】
しかしながら、特許文献1においては、振動の立ち上がり部分の記録が必須であり、何らかの原因で振動の立ち上がり部分の記録ができなかった場合には、時刻の同期に支障をきたすことがある。また、地震記録データの立ち上がり部分の波形しか使用しないため、短い波形で時刻同期計算を行わねばならず、精度確保の面で改善の余地がある。さらに、地震記録データから立ち上がり部分波形を抽出する範囲の設定長さによって、時刻同期の結果が異なる可能性がある。
【0009】
また、特許文献2においては、入力側の第1振動波形データと出力側の第2振動波形データとの間の時間ずれを、第1振動波形データと第2振動波形データとの間の伝達関数を用いて算出する方法が開示されている。特許文献2においては、第2振動波形データから伝達関数の影響を除去した第3振動波形データと、第1振動波形データとの相関に基づいて、第1振動波形データと第2振動波形データとの間の時間ずれが算出される。
【0010】
しかしながら、特許文献2においては、第1振動波形データを取得する第1振動計は、振動源側に設置される必要があるため、第1振動計と、第2振動波形データを取得する第2振動計との位置関係が限定される。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
他の特許を見る

 特許ウォッチ
特許ウォッチ