TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025021843
公報種別
公開特許公報(A)
公開日
2025-02-14
出願番号
2023125848
出願日
2023-08-01
発明の名称
モデル生成装置、モデル生成方法、順列生成システム、およびプログラム
出願人
株式会社NTTデータグループ
,
国立大学法人広島大学
代理人
弁理士法人志賀国際特許事務所
主分類
G06N
99/00 20190101AFI20250206BHJP(計算;計数)
要約
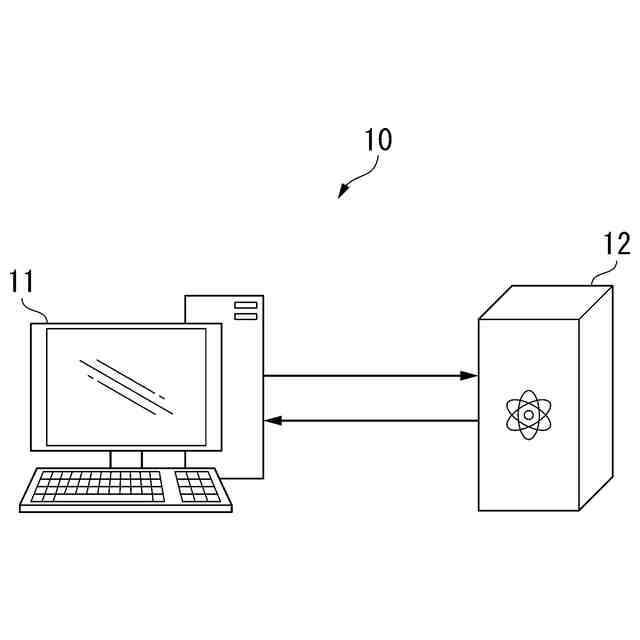
【課題】順列あるいは部分順列を生成するための、従来より、2次項の少ないモデルを生成できるモデル生成装置を提供すること。
【解決手段】モデル生成装置は、解く問題が入力されると、m≦nを満たす2つの自然数m、nについて、n個の数から重複なくm個の数を選んでならべた1つの順列を求めるためのモデルに変換する問題変換部を備え、問題変換部は、n個の数からm個を選んだ第1の列Aと、m個の数からn個を選んだ第2の列Bが所定の条件を満たすことを、1つの順列を求める際の制約条件として、モデルに含め、所定の条件は、第1の列Aが順列であり、第2の列Bが、第1の列Aの逆順列であることである。
【選択図】図1
特許請求の範囲
【請求項1】
解く問題が入力されると、m≦nを満たす2つの自然数m、nについて、n個の数から重複なくm個の数を選んでならべた1つの順列を求めるためのモデルに変換する問題変換部を備え、
前記問題変換部は、前記n個の数からm個を選んだ第1の列Aと、m個の数からn個を選んだ第2の列Bが所定の条件を満たすことを、前記1つの順列を求める際の制約条件として、前記モデルに含め、
前記所定の条件は、前記第1の列Aが順列であり、前記第2の列Bが、前記第1の列Aの逆順列であることである、
モデル生成装置。
続きを表示(約 1,500 文字)
【請求項2】
前記第1の列Aと、前記第2の列Bの各々を構成する整数を、2値ベクトルを用いて表し、
前記2値ベクトルを用いて表すための制約条件を表す式における2次項の個数が、前記2値ベクトルの要素の数の1次式で表される、請求項1に記載のモデル生成装置。
【請求項3】
前記第1の列Aと、前記第2の列Bの各々を構成する整数を、domain-wall表現を用いて表す、請求項2に記載のモデル生成装置。
【請求項4】
前記モデルは、値が最小となるときに前記制約条件を満たし、前記第1の列Aと、前記第2の列Bの各々を構成する整数を表す2値ベクトルを引数とする目的関数である、請求項2または請求項3に記載のモデル生成装置。
【請求項5】
m<nであり、
前記所定の条件は、前記第1の列Aが表す順列が、補助変数行列が表す順列と一致し、前記第2の列Bが表す逆順列のうち、少なくとも前記第1の列Aが表す順列により定義される部分が、前記補助変数行列が表す逆順列と一致していることである、請求項1に記載のモデル生成装置。
【請求項6】
m=nであり、
前記所定の条件は、前記第1の列Aが表す順列が、補助変数行列が表す順列と一致し、前記第2の列Bが表す逆順列が、前記補助変数行列が表す逆順列と一致していることである、請求項1に記載のモデル生成装置。
【請求項7】
解く問題を、m≦nを満たす2つの自然数m、nについて、n個の数から重複なくm個の数を選んでならべた1つの順列を求めるためのモデルに変換するステップを有し、
前記ステップにおいて、前記n個の数からm個を選んだ第1の列Aと、m個の数からn個を選んだ第2の列Bが所定の条件を満たすことを、前記1つの順列を求める際の制約条件として、前記モデルに含め、
前記所定の条件は、前記第1の列Aが順列であり、前記第2の列Bが、前記第1の列Aの逆順列であることである、
モデル生成方法。
【請求項8】
モデル生成装置と、モデル解法装置とを備え、
前記モデル生成装置は、
解く問題が入力されると、m≦nを満たす2つの自然数m、nについて、n個の数から重複なくm個の数を選んでならべた1つの順列を求めるためのモデルに変換する問題変換部を備え、
前記問題変換部は、前記n個の数からm個を選んだ第1の列Aと、m個の数からn個を選んだ第2の列Bが所定の条件を満たすことを、前記1つの順列を求める際の制約条件として、前記モデルに含め、
前記所定の条件は、前記第1の列Aが順列であり、前記第2の列Bが、前記第1の列Aの逆順列であることであり、
前記モデル解法装置は、前記モデルの示す値が最小となる最適解、あるいは最適解の近似解を算出する、
順列生成システム。
【請求項9】
コンピュータを、
解く問題が入力されると、m≦nを満たす2つの自然数m、nについて、n個の数から重複なくm個の数を選んでならべた1つの順列を求めるためのモデルに変換する問題変換部として機能させるためのプログラムであって、
前記問題変換部は、前記n個の数からm個を選んだ第1の列Aと、m個の数からn個を選んだ第2の列Bが所定の条件を満たすことを、前記1つの順列を求める際の制約条件として、前記モデルに含め、
前記所定の条件は、前記第1の列Aが順列であり、前記第2の列Bが、前記第1の列Aの逆順列であることである、
プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、モデル生成装置、モデル生成方法、順列生成システム、およびプログラムに関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
<量子アニーラーと疑似量子アニーラー>
量子アニーラーとは、量子効果を用いて組合せ最適化問題を短時間で解く専用計算機である。一方、量子アニーラーには、量子ビットの数が少ないことや、ノイズが原因で正しい計算結果が求まらない場合があるなどの課題もある。疑似量子アニーラーは、通常のCPUやGPU、FPGA、ASICなどの半導体を用いて、量子効果を使わずに、後述するIsingモデルあるいはQUBOモデルを解く装置やソフトウェアである。
【0003】
<IsingモデルとQUBOモデル>
量子アニーラーは、-1または+1の値をとる量子ビットを変数とする2次式であるIsingモデルを直接扱う。一方、疑似量子アニーラーは、QUBO(Quadratic Unconstrainted Binary Optimization)モデルを扱うことが多い。QUBOモデルは、アルゴリズムの設計が行いやすいように、各量子ビットが0または1の値をとるようにIsingモデルを変更したものであり、QUBOモデルとIsingモデルとは、モデルのトポロジー(2次項で表される相互作用の形状)を変えることなく相互に等価変換可能である。
【0004】
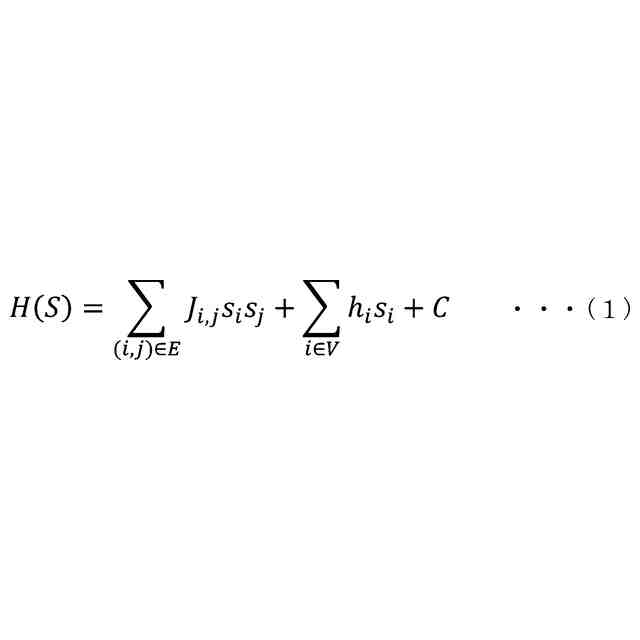
Isingモデルは、下記の式(1)で表される。式(1)において、集合Vは、n個のノードの集合であり、集合Eは、ノードを結ぶ辺の集合であり、重みJ
i,j
は、ノードiとノードjを結ぶ辺((i、j)∈E)における相互作用(interaction)の重みであり、重みh
i
は、ノードiのバイアス(bias)の重みであり、変数s
i
は、ノードi(i∈V)のスピンを表し、-1または+1の値をとる量子ビット(qubit)である。H(S)は、s
i
(iは0からn-1)を要素とするnビットのスピンベクトルSのハミルトニアンである。なお、定数Cはオフセットであり、記述しない場合もある。式(1)における第1和項は、2次項と呼ばれ、第2和項は、1次項と呼ばれる。
【0005】
TIFF
2025021843000002.tif
17
170
【0006】
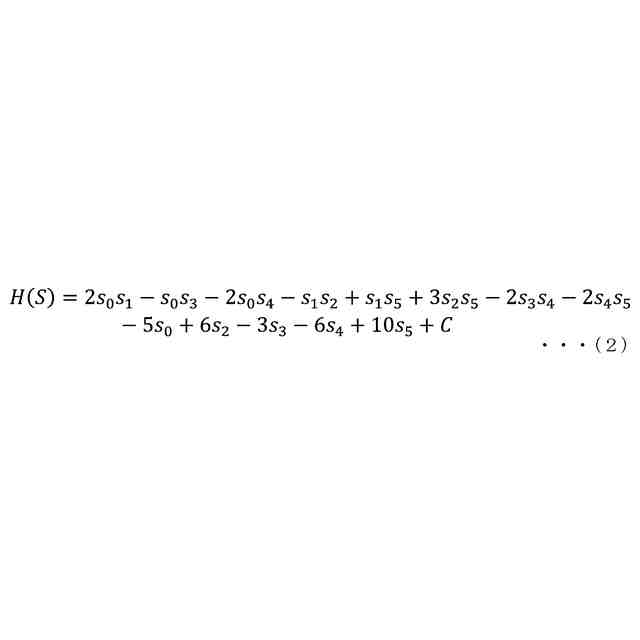
例えば、図11に示すようなノード構成のIsingモデルは、下記の式(2)となる。なお、図11において、丸印各々がノードであり、丸印内の数はノードの番号iであり、丸印に付した数はバイアスの重みh
i
であり、丸印を結ぶ辺に付した数は該線により結ばれたノード間の相互作用の重みJ
i,j
である。式(2)においては、式(1)の第1和項に対応する第1項から第8項が2次項であり、式(1)の第2和項に対応する第9から第13項が1次項である。量子アニーラーあるいは疑似量子アニーラーは、式(2)が入力されると、H(S)が最小となるベクトルS(最適解)を算出する。式(2)の場合、H(S)=-32となる、ベクトルS=[+1, -1, -1, +1, +1, -1]が最適解として算出される。
【0007】
TIFF
2025021843000003.tif
19
170
【0008】
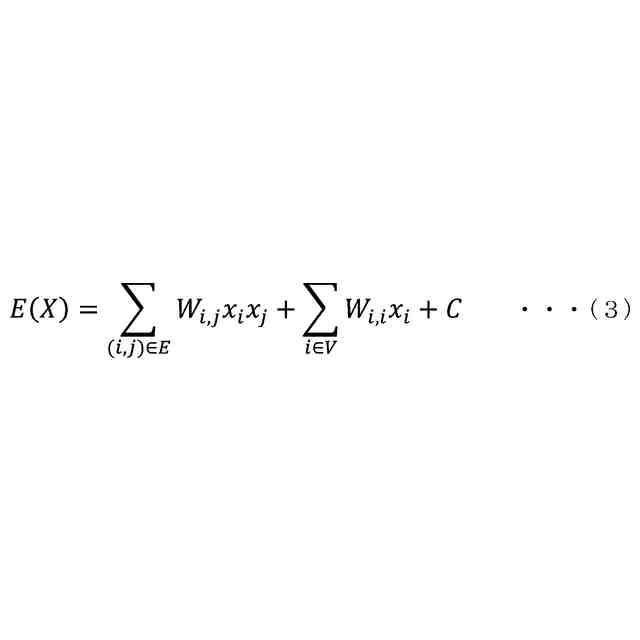
QUBOモデルは、下記の式(3)で表される。式(3)においても、集合Vは、n個のノードの集合であり、集合Eは、ノードを結ぶ辺の集合である。重みW
i,j
は、ノードiとノードjを結ぶ辺((i、j)∈E)における相互作用(interaction)の重みであり、重みW
i,i
は、ノードiのバイアス(bias)の重みである。なお、重みW
i,i
は、自己ループ辺(i, i)の重みとみなしてもよい。変数x
i
は、0または1の値をとるビットである。E(X)、すなわち、式(3)は、x
i
(iは0からn-1)を要素とするnビットのベクトルXのエネルギーである。なお、定数Cはオフセットであり、記述しない場合もある。式(3)においても、第1和項は、2次項であり、第2和項は、1次項である。
【0009】
TIFF
2025021843000004.tif
17
170
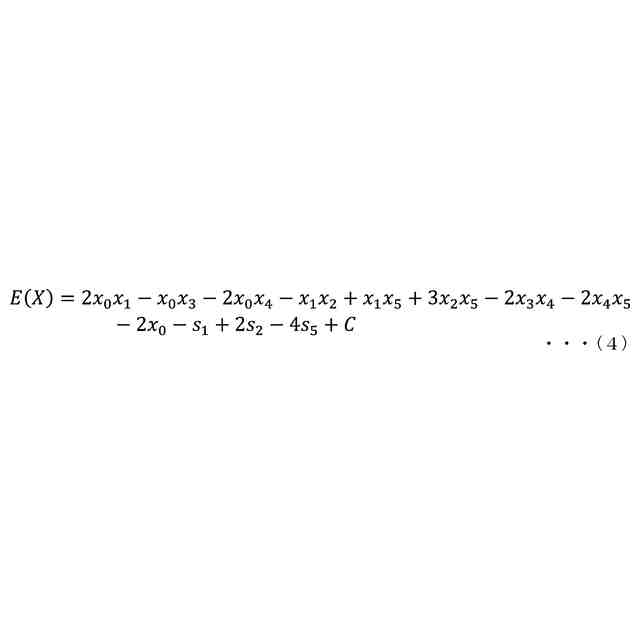
【0010】
例えば、図12に示すようなノード構成のQUBOモデルは、下記の式(4)となる。なお、図12において、丸印各々がノードであり、丸印内の数はノードの番号iであり、丸印に付した数はバイアスの重みW
i,i
であり、丸印を結ぶ辺に付した数は該線により結ばれたノード間の相互作用の重みW
i,j
である。式(4)においては、式(3)の第1和項に対応する第1項から第8項が2次項であり、式(3)の第2和項に対応する第9から第12項が1次項である。疑似量子アニーラーは、式(4)が入力されると、E(X)が最小となるベクトルX(最適解)を算出する。式(4)の場合、E(X)=-7となる、ベクトルX=[1, 0, 0, 1, 1, 0]が最適解として算出される。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
他の特許を見る

 特許ウォッチ
特許ウォッチ