TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025021588
公報種別
公開特許公報(A)
公開日
2025-02-14
出願番号
2023125381
出願日
2023-08-01
発明の名称
通信システム及び通信方法
出願人
コグニティブリサーチラボ株式会社
代理人
個人
,
個人
,
個人
主分類
B64U
20/80 20230101AFI20250206BHJP(航空機;飛行;宇宙工学)
要約
【課題】複数のドローンがスウォームとして飛行する場合に、ドローン相互間の位置を確認し、接触・衝突を回避する。
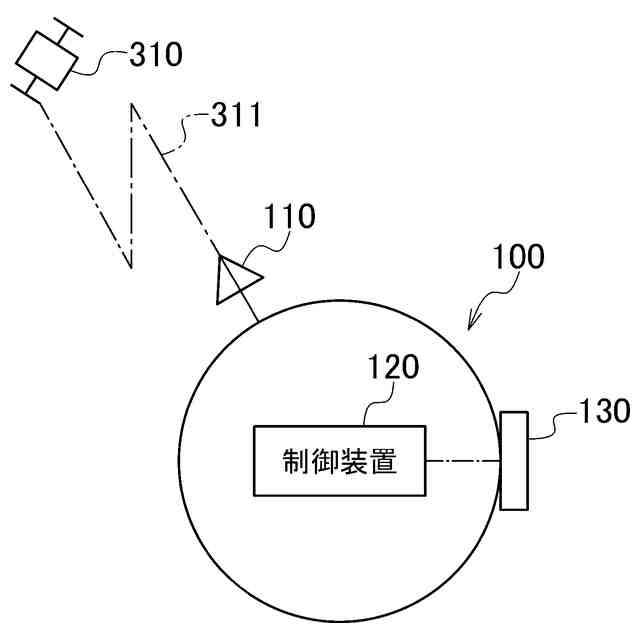
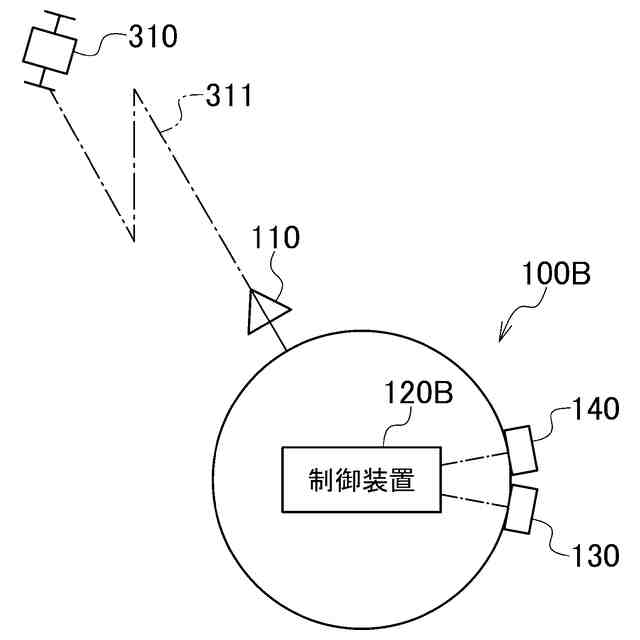
【解決手段】第一ドローン(100)はGPS衛星(310)から第一ドローン(100)の位置座標を示す信号(311)を受信し、その位置座標を光パターンとしてディスプレイパネル(130)を介して表示する。第二ドローンはこの光パターンを撮像し、第一ドローンの位置を特定する。
【選択図】図1
特許請求の範囲
【請求項1】
少なくとも1個の第一移動体と、少なくとも1個の第二移動体と、を少なくとも含む通信対象物相互間の通信システムであって、
前記通信システムは、
前記第一移動体が備える位置座標信号受信装置、制御装置及び表示装置と、
前記第二移動体が備える撮像装置及び制御装置と、
からなり、
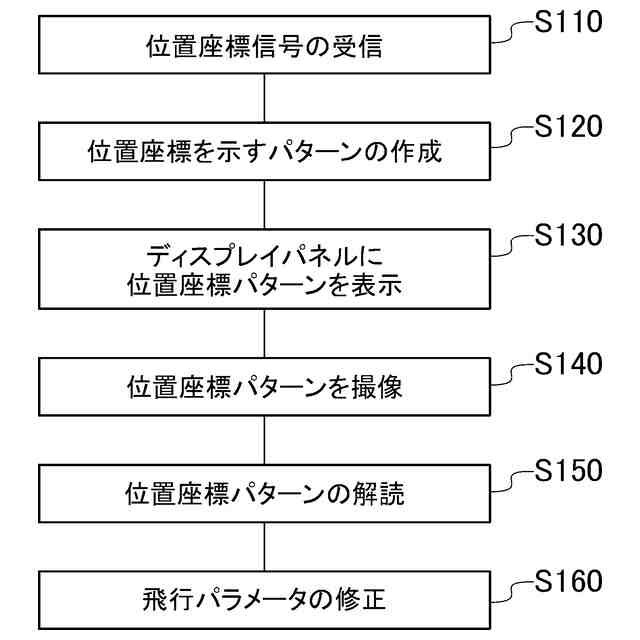
前記位置座標信号受信装置は衛星と交信可能であり、前記衛星から前記第一移動体の位置座標を示す信号を受信し、
前記第一移動体の前記制御装置は、前記第一移動体の位置座標を示すパターンその他のパターンを作成し、
前記表示装置は前記制御装置が作成した前記パターンを表示し、
前記撮像装置は前記表示装置が表示する前記パターンを撮像し、
前記第二移動体の前記制御装置は前記撮像装置が撮像した前記パターンを解読し、解読したパターンの指示に従って当該第二移動体の位置を制御するものであることを特徴とする通信システム。
続きを表示(約 1,200 文字)
【請求項2】
前記第二移動体の前記制御装置は当該第二移動体の位置座標を示すパターンその他のパターンを作成し、
前記第二移動体は前記パターンを表示する表示装置を備えており、
前記第一移動体は前記第二移動体の前記表示装置が表示する前記パターンを撮像する撮像装置を備えており、
前記第一移動体の前記制御装置は前記第一移動体の前記撮像装置が撮像した前記パターンを解読するものであることを特徴とする請求項1に記載の通信システム。
【請求項3】
前記第二移動体の前記制御装置は当該第二移動体の位置座標を示すパターンその他のパターンを作成し、
前記第二移動体は前記パターンを表示する表示装置を備えており、
他の第二移動体は、前記第二移動体の前記表示装置が表示したパターンを前記撮像装置によって撮像し、
前記他の第二移動体の前記制御装置は前記撮像装置が撮像した前記パターンを解読するものであることを特徴とする請求項1に記載の通信システム。
【請求項4】
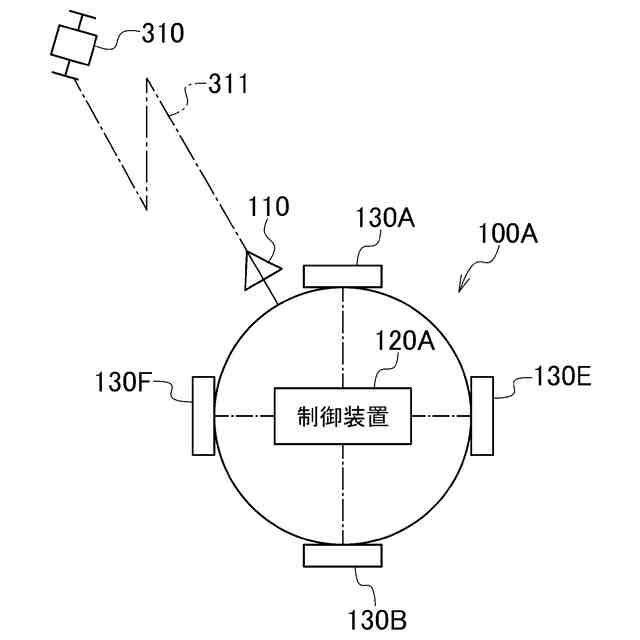
前記第一移動体は6個の前記表示装置を備えており、
前記6個の前記表示装置は前記第一移動体の移動方向における前後、左右及び上下にそれぞれ設置されていることを特徴とする請求項1に記載の通信システム。
【請求項5】
前記表示装置は、前記表示装置を前記第一移動体に取り付けている軸を中心として回動または枢動可能であることを特徴とする請求項1に記載の通信システム。
【請求項6】
前記表示装置は予め定められた経路に沿って前記第一移動体のボディ上を移動可能であることを特徴とする請求項1に記載の通信システム。
【請求項7】
前記第二移動体は6個の前記撮像装置を備えており、前記6個の前記撮像装置は前記第二移動体の移動方向における前後、左右及び上下にそれぞれ設置されていることを特徴とする請求項1に記載の通信システム。
【請求項8】
前記撮像装置は、前記撮像装置を前記第二移動体に取り付けている軸を中心として枢動可能であることを特徴とする請求項1に記載の通信システム。
【請求項9】
前記撮像装置は予め定められた経路に沿って前記第二移動体のボディ上を移動可能であることを特徴とする請求項1に記載の通信システム。
【請求項10】
前記第二移動体の前記制御装置は、前記撮像装置が前記第一移動体の前記表示装置から発せられたパターンを撮像したときには、前記パターンを受信したことを示す確認パターンを前記第二移動体の前記表示装置から前記第一移動体に対して発信し、
前記第一移動体の前記撮像装置が前記確認パターンを撮像することを特徴とする請求項2に記載の通信システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は複数個の移動体、特に、複数個の飛行体相互間の通信システム及び通信方法に関する。
続きを表示(約 3,400 文字)
【背景技術】
【0002】
現在では、ドローンに代表される無人航空機の実装が社会的に広がっており、今後も飛躍的に広がることが予想される。
ドローンの平時利用の例としては、物流業界における宅配ドローン、運輸業界における無人航空タクシーなどがある。
ドローンは平和利用のみならず、軍事利用にも供される。特に、現代の戦闘においては、ドローンは従来の兵器に代わって主要な要素になりつつある。
このため、戦闘中の双方の勢力は、敵側の軍事ドローンに対して、電子機器を破壊する電子戦(Electronic Warfare:EW)や、ドローンの諸機能を無効化するための電子妨害(Jamming:ジャミング)を頻繁に行っている。
このように、ドローンの利用が増大するにつれて、ドローンの動作を正確に制御する必要性、具体的には、ドローンに対するハッキング(EWやジャミングも含む)を防止する必要性も増大する。
【0003】
例えば、無人航空タクシーがハッキングされると、高速道路や海に乗客を下ろしたりすることにより乗客の安全を脅かすおそれがある。
あるいは、軍事ドローンがハッキングされれば、自軍側にUターンしてくるおそれがあり、あるいは、ドローン同士で衝突し合うおそれもある。
また、ドローンは、特に軍事利用においては、1機のみでの利用ではなく、複数機(数十機、数百機または数千機)のドローンを一群とするスウォーム(Swarm)として利用されることが増えつつある。
スウォームにおいては、ドローン同士の接触や衝突を避けるため、各ドローン間の相対的位置関係を正確に把握することが必要である。
以上のように、これからのドローンにはハッキングに対する耐性と、特にスウォームにおける各ドローンの正確な位置把握とが要求される。
【0004】
飛行体の位置把握のシステムの一例として特開2010-88033号公報に記載されたものがある。
同公報に記載されている通信システムにおいては、ヘリコプターに移動体無線通信装置を搭載し、この移動体無線通信装置によってヘリコプター自身の位置を把握し、どのエリアにいるのかを判断し、そのエリアに対応する基地局の局番号を記憶する。
また、実用新案登録第3224856号公報には、無線機を搭載するドローンと、無線機を備える地上局と、からなる通信システムが開示されている。ドローンと地上局とは、920MHz帯の周波数で双方向の通信を行うことにより、通信速度を上げることができる。
【先行技術文献】
【特許文献】
【0005】
特開2010-88033号公報
実用新案登録第3224856号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
以上のように、従来においては、自機の位置把握は一般的には無線通信を介して行われていた。
また、スウォームにおいて各ドローン間の接触や衝突を回避するための各ドローンの位置制御も従来は無線による制御が主流であった。
しかしながら、無線通信はジャミングによって容易に妨害または無効化される。
このため、ドローン間の通信システムはジャミングやEWに対する耐性を有することが要求される。
これはドローン間のみならず、あらゆる飛行体間または地上移動体や水上移動体などの移動体間に共通する課題である。
本発明はこのような移動体間の従来の通信システムにおける問題点に鑑みてなされたものであり、ジャミングやEWなどの電磁的妨害に対する耐性を付与された通信システムを提供することを目的とする。
【課題を解決するための手段】
【0007】
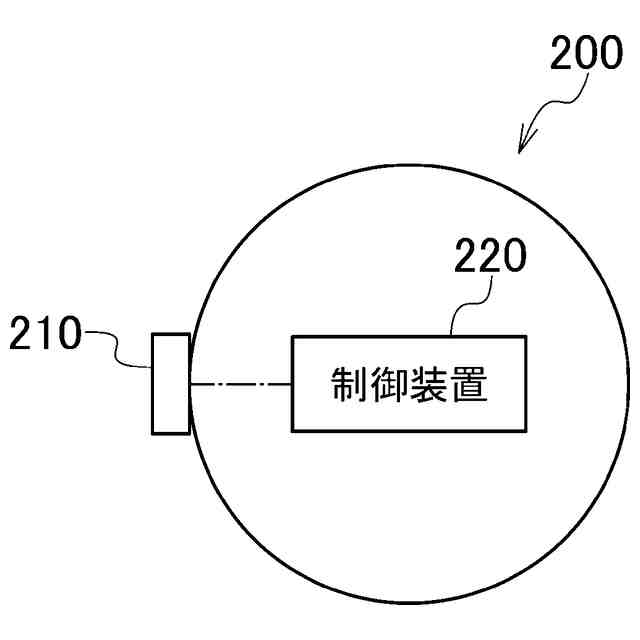
この目的を達成するため、本発明は、少なくとも1個の第一移動体(100)と、少なくとも1個の第二移動体(200)と、を少なくとも含む通信対象物相互間の通信システムであって、前記通信システムは、前記第一移動体(100)が備える位置座標信号受信装置(110)、制御装置(120)及び表示装置(130)と、前記第二移動体(200)が備える撮像装置(210)及び制御装置(220)と、からなり、前記位置座標信号受信装置(110)は衛星(310)と交信可能であり、前記衛星(310)から前記第一移動体(100)の位置座標を示す信号(311)を受信し、前記第一移動体(100)の前記制御装置(110)は、前記第一移動体(100)の位置座標を示すパターンその他のパターンを作成し、前記表示装置(130)は前記制御装置(120)が作成した前記パターンを表示し、前記撮像装置(210)は前記表示装置(130)が表示する前記パターンを撮像し、前記第二移動体(200)の前記制御装置(220)は前記撮像装置(210)が撮像した前記パターンを解読し、解読したパターンの指示に従って当該第二移動体(200)の位置を制御するものであることを特徴とする通信システムを提供する。
【0008】
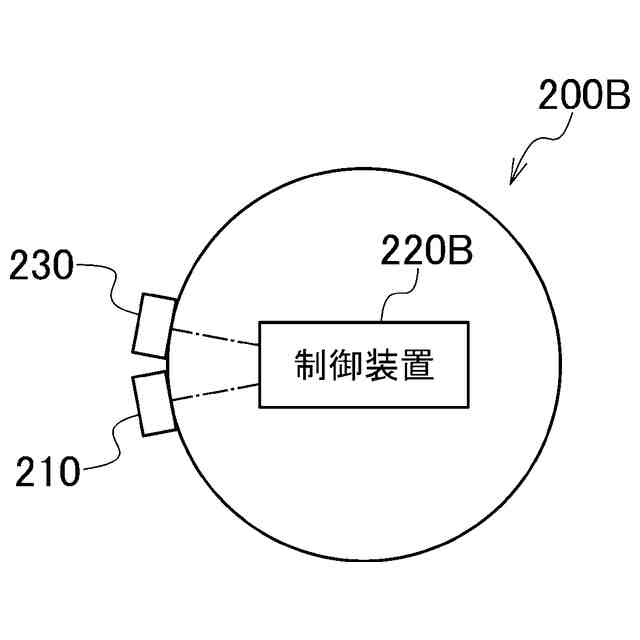
前記第二移動体(200B)の前記制御装置(220B)は当該第二移動体(200B)の位置座標を示すパターンその他のパターンを作成し、前記第二移動体(200B)は前記パターンを表示する表示装置(230)を備えており、前記第一移動体(100B)は前記第二移動体(200B)の前記表示装置(230)が表示する前記パターンを撮像する撮像装置(140)を備えており、前記第一移動体(100B)の前記制御装置(120B)は前記第一移動体(100B)の前記撮像装置(140)が撮像した前記パターンを解読するものであることが好ましい。
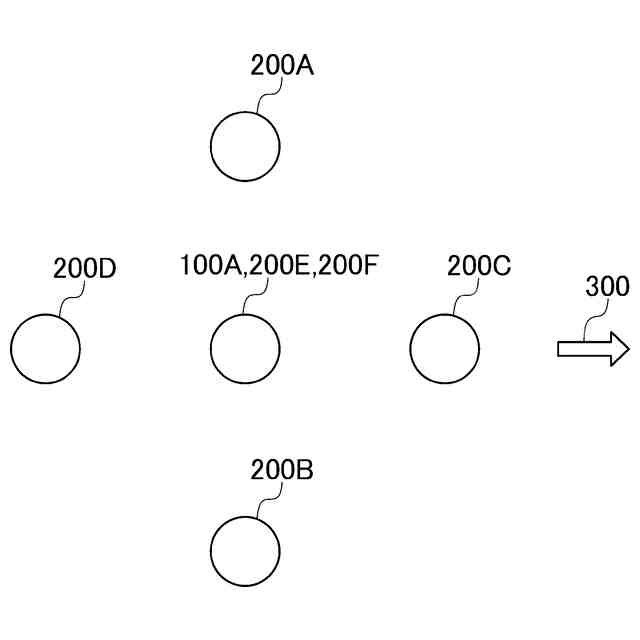
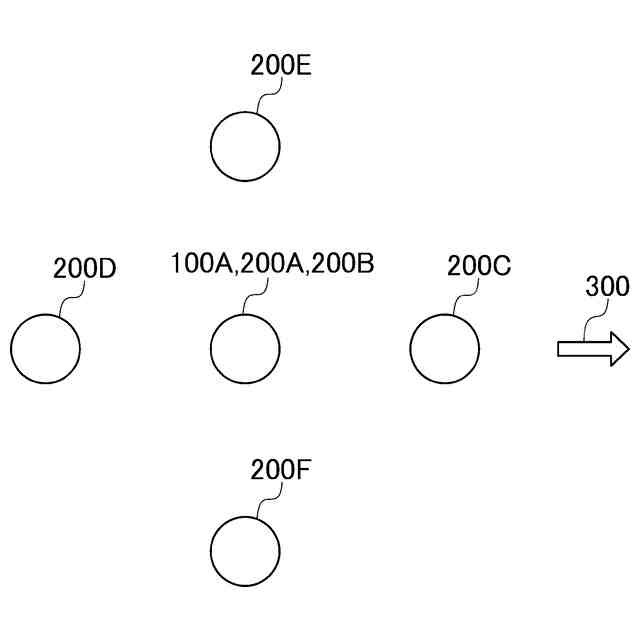
前記第二移動体(200B)の前記制御装置(220B)は当該第二移動体(200B)の位置座標を示すパターンその他のパターンを作成し、前記第二移動体(200B)は前記パターンを表示する表示装置(230)を備えており、他の第二移動体(200B)は、前記第二移動体(200B)の前記表示装置(230)が表示したパターンを前記撮像装置(210)によって撮像し、前記他の第二移動体(200B)の前記制御装置(220B)は前記撮像装置(210)が撮像した前記パターンを解読するものであることが好ましい。
【0009】
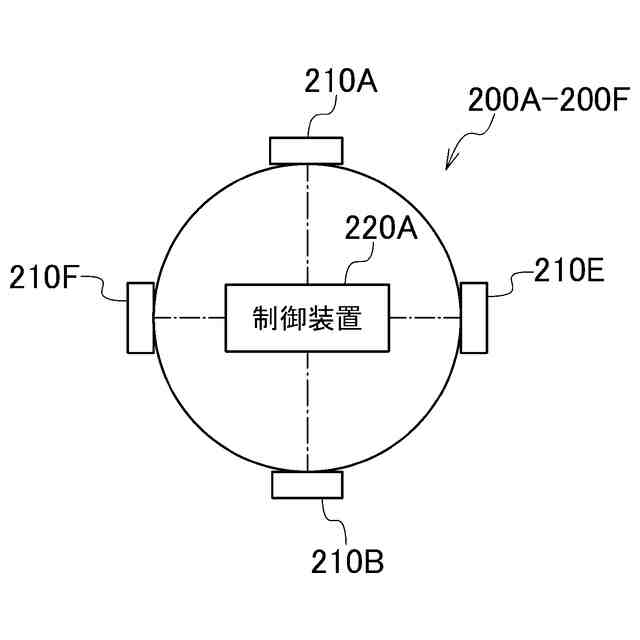
例えば、前記第一移動体(100A)は6個の前記表示装置(130A-130F)を備えており、前記6個の前記表示装置(130A-130F)は前記第一移動体(100A)の移動方向における前後、左右及び上下にそれぞれ設置されていることが好ましい。
前記表示装置(130G)は、前記表示装置(130G)を前記第一移動体(100)に取り付けている軸(312)を中心として回動または枢動可能であることが好ましい。
前記表示装置(130H)は予め定められた経路に沿って前記第一移動体(100)のボディ上を移動可能であることが好ましい。
前記第二移動体は6個の前記撮像装置を備えており、前記6個の前記撮像装置は前記第二移動体の移動方向における前後、左右及び上下にそれぞれ設置されていることが好ましい。
【0010】
前記撮像装置は、前記撮像装置を前記第二移動体に取り付けている軸を中心として枢動可能であることが好ましい。
前記撮像装置は予め定められた経路に沿って前記第二移動体のボディ上を移動可能であることが好ましい。
前記第二移動体の前記制御装置は、前記撮像装置が前記第一移動体の前記表示装置から発せられたパターンを撮像したときには、前記パターンを受信したことを示す確認パターンを前記第二移動体の前記表示装置から前記第一移動体に対して発信し、前記第一移動体の前記撮像装置が前記確認パターンを撮像することが好ましい。
前記第一移動体の前記制御装置は、前記第一移動体の前記表示装置からパターンを発信した後に予め定められた時間内に前記第二移動体から前記確認パターンを受信しないときには、前記第一移動体の前記表示装置から発せられるパターンの光量を大きくすることが好ましい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
他の特許を見る

 特許ウォッチ
特許ウォッチ