TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025018204
公報種別
公開特許公報(A)
公開日
2025-02-06
出願番号
2023121713
出願日
2023-07-26
発明の名称
自動運転システム
出願人
トヨタ自動車株式会社
代理人
弁理士法人高田・高橋国際特許事務所
主分類
B60W
50/00 20060101AFI20250130BHJP(車両一般)
要約
【課題】機械学習モデルを用いた自動運転制御が行われる車両において、この自動運転制御に関連するログデータが保存される当該車両の記憶装置の空き容量が逼迫する状況となるのを未然に回避する。
【解決手段】車両の自動運転制御のための処理と、自動運転制御の実行中、自動運転制御に関するログデータを1又は複数の記憶装置に保存する処理と、車両の航続可能距離を予測する処理と、が行われる。航続可能距離を予測する処理では、ログデータが保存される1又は複数の記憶装置の空き容量が取得される。また、取得された空き容量に応じて航続可能距離が設定される。航続可能距離は、取得された空き容量が少ないほど短い距離に設定される。
【選択図】図4
特許請求の範囲
【請求項1】
車両に搭載される自動運転システムであって、
1又は複数のプロセッサと、
1又は複数の記憶装置と、
を備え、
前記1又は複数のプロセッサは、
前記車両の自動運転制御のための処理と、
前記自動運転制御の実行中、前記自動運転制御に関するログデータを前記1又は複数の記憶装置に保存する処理と、
前記車両の航続可能距離を予測する処理と、
を行うように構成され、
前記1又は複数のプロセッサは、前記航続可能距離を予測する処理において、
前記ログデータが保存される前記1又は複数の記憶装置の空き容量を取得し、
前記空き容量に応じて前記航続可能距離を設定する
ように構成され、
前記航続可能距離が、前記空き容量が少ないほど短い距離に設定される
ことを特徴とする自動運転システム。
続きを表示(約 860 文字)
【請求項2】
請求項1に記載の自動運転システムであって、
前記1又は複数のプロセッサは、更に、
前記空き容量に応じて設定された前記航続可能距離が所定距離以下の場合、前記空き容量を拡大する処理を行うように構成される
こと特徴とする自動運転システム。
【請求項3】
請求項1に記載の自動運転システムであって、
前記1又は複数の記憶装置には、前記車両の現在地及び目的地の位置情報が格納され、
前記1又は複数のプロセッサは、更に、
前記現在地及び目的地の位置情報に基づいて、前記現在地から前記目的地に向かうルートを構成する区間のうち、前記自動運転制御の実行が可能な区間の合計距離を計算する処理と、
前記合計距離が前記空き容量に応じて設定された前記航続可能距離以上の場合、前記空き容量を拡大する処理を行うように構成される
ことを特徴とする自動運転システム。
【請求項4】
請求項1に記載の自動運転システムであって、
前記1又は複数の記憶装置には、前記車両の現在地及び目的地の位置情報が格納され、
前記1又は複数のプロセッサは、更に、
前記現在地及び目的地の位置情報に基づいて、前記現在地から前記目的地に向かうルートを設定する処理を行い、
前記1又は複数のプロセッサは、前記ルートを設定する処理において、
前記ルートの候補を少なくとも2つ設定し、
前記ルートの候補のそれぞれに沿った前記車両の走行中に発生する前記ログデータの総量を予測し、
前記ルートの候補のそれぞれについて予測された前記ログデータの総量に基づいて、前記ルートの候補の目的地への到着時における前記1又は複数の記憶装置内の空き容量の将来値をそれぞれ予測し、
前記ルートの候補のうちから前記空き容量の将来値が最大となるルートの候補を、前記ルートとして選出する
ことを特徴とする自動運転システム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、車両の自動運転制御を行うシステムに関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
近年、機械学習を通じて生成されたモデル(機械学習モデル)を使用して、車両に搭載されたセンサ等のデータから、当該車両を制御する自動運転技術の開発が進んでいる。国際公開第2019/116423号では、機械学習モデルの生成に使用するための訓練データを収集する方法が提案されている。
【0003】
本開示に関連する技術分野の技術水準を示す文献としては、国際公開第2019/116423号の他に、特開2011-113494号公報、特開2022-44235号公報及び特許第6761002号公報を例示することができる。
【先行技術文献】
【特許文献】
【0004】
国際公開第2019/116423号
特開2011-113494号公報
特開2022-44235号公報
特許第6761002号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
機械学習モデルを用いて行われた車両の自動運転制御は、事後的に検証されることが望ましい。この検証を可能にする方法として、車両の自動運転制御に関連するログデータを当該車両の記憶装置に保存することが考えられる。但し、車両の記憶装置の容量には限界がある。そのため、このログデータのデータ量が一定以上に到達したら、これを外部に送信して記憶装置から削除することが考えられる。しかしながら、自動運転制御の実行中、これに関連するログデータは時々刻々と発生する。そのため、外部に送信する前のログデータと、自動運転制御中に発生したログデータとによって記憶装置の空き容量が逼迫したときには、後者のログデータの保存が途中から行えないことになる可能性がある。したがって、このような逼迫状況となるのを未然に回避するため技術開発が望まれる。
【0006】
本開示の1つの目的は、機械学習モデルを用いた自動運転制御が行われる車両において、この自動運転制御に関連するログデータが保存される当該車両の記憶装置の空き容量が逼迫する状況となるのを未然に回避することができる技術を提供することにある。
【課題を解決するための手段】
【0007】
本開示は、車両に搭載される自動運転システムであり、次の特徴を有する。
前記自動運転システムは、1又は複数のプロセッサと、1又は複数の記憶装置と、を備える。
前記1又は複数のプロセッサは、前記車両の自動運転制御のための処理と、前記自動運転制御の実行中、前記自動運転制御に関するログデータを前記1又は複数の記憶装置に保存する処理と、前記車両の航続可能距離を予測する処理と、を行うように構成される。
前記1又は複数のプロセッサは、前記航続可能距離を予測する処理において、前記ログデータが保存される前記1又は複数の記憶装置の空き容量を取得し、前記空き容量に応じて前記航続可能距離を設定するように構成される。前記航続可能距離は、前記空き容量が少ないほど短い距離に設定される。
【発明の効果】
【0008】
本開示によれば、1又は複数の記憶装置の空き容量に応じて車両の航続可能距離が予測される。また、この航続可能距離は、空き容量が少ないほど短い距離に設定される。そのため、空き容量が逼迫する状況となるのを未然に回避することが可能となる。
【図面の簡単な説明】
【0009】
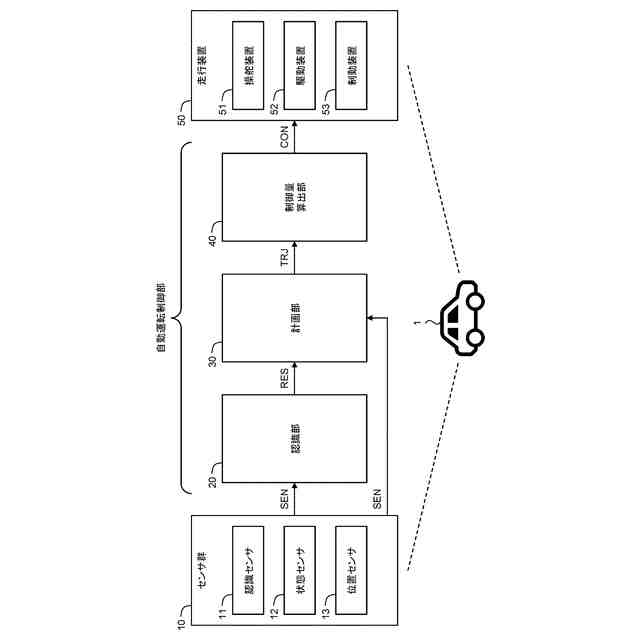
実施の形態に係る車両の自動運転制御に関連する構成例を示すブロック図である。
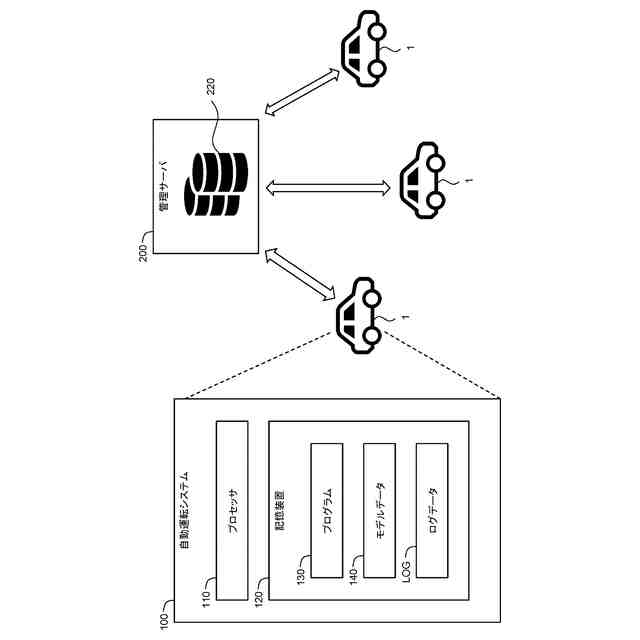
実施の形態に係る自動運転システムの構成例を示す概念図である。
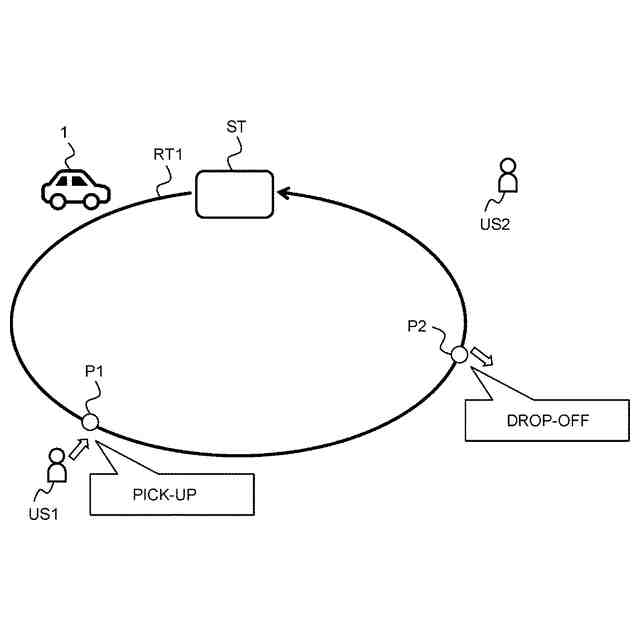
モビリティサービスの概念図を示す図である。
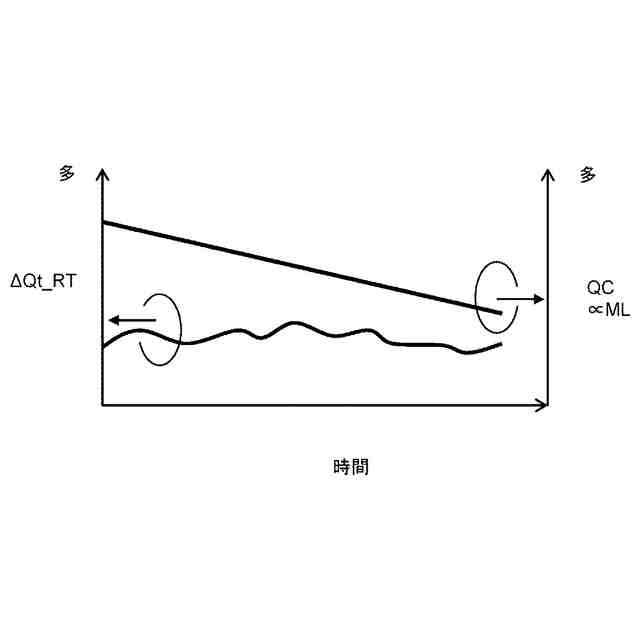
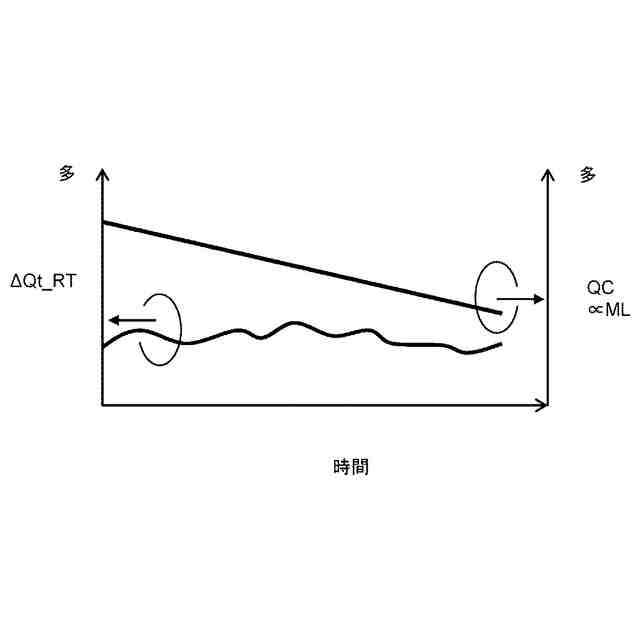
自動運転制御の実行の継続時間と、記録装置の空き容量との関係の一例を示した図である。
記録装置の空き容量の拡大処理を説明する図である。
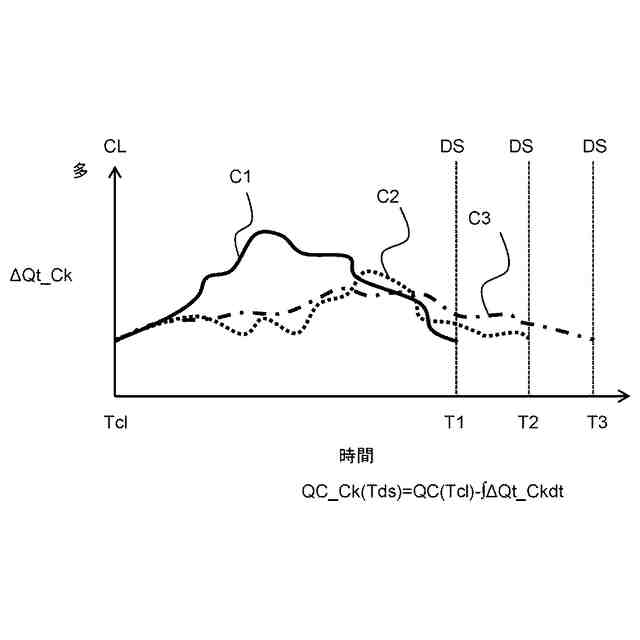
ルートの候補に沿った車両の走行中に発生するログデータの総量を説明する図である。
【発明を実施するための形態】
【0010】
1.車両の自動運転
図1は、本実施の形態に係る車両1の自動運転制御に関連する構成例を示すブロック図である。自動運転とは、車両1の操舵、加速、及び減速のうち少なくとも1つをオペレータによる運転操作によらず自動的に行うことである。自動運転制御は、完全自動運転制御だけでなく、リスク回避制御、レーンキープアシスト制御、等も含む概念である。オペレータは、車両1に搭乗するドライバであってもよいし、車両1を遠隔操作する遠隔オペレータであってもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
他の特許を見る

 特許ウォッチ
特許ウォッチ