TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025017719
公報種別
公開特許公報(A)
公開日
2025-02-06
出願番号
2023120901
出願日
2023-07-25
発明の名称
路面状態検出装置
出願人
トヨタ自動車株式会社
代理人
弁理士法人中部国際特許事務所
主分類
B60W
40/06 20120101AFI20250130BHJP(車両一般)
要約
【課題】ユーザによる路面補修の要否の判断を容易にすることができる路面状態検出装置を提供する。
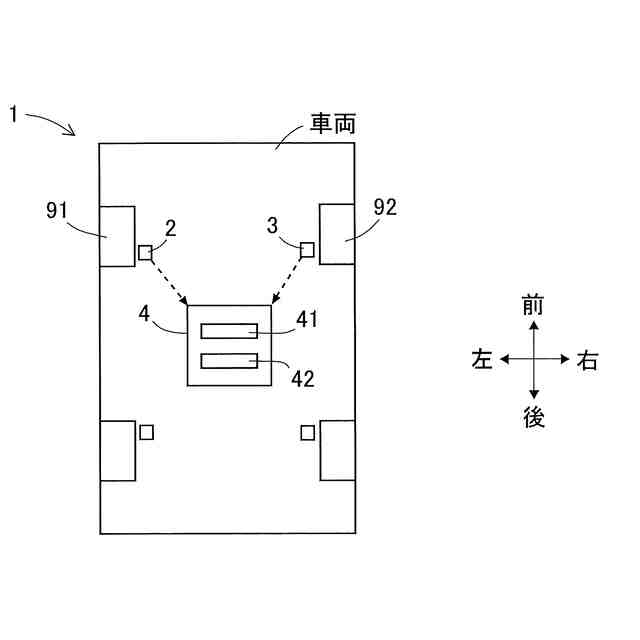
【解決手段】本発明は、左車輪速度センサ2の検出値及び右車輪速度センサ3の検出値を受信するコンピュータ4を備え、コンピュータ4は、左車輪速度センサ2の検出値に基づいて左車輪91の車輪加速度である左車輪加速度を演算し、右車輪速度センサ3の検出値に基づいて右車輪92の車輪加速度である右車輪加速度を演算し、左車輪加速度及び右車輪加速度に基づいて路面の凹凸を検出した場合、路面の凹凸の検出を経過時間のカウントのトリガーとした所定期間における、左車輪加速度の最大値に関連する情報及び右車輪加速度の最大値に関連する情報に基づいて、検出した路面の凹凸が路面の補修対象でない特定段差であるか否かを判定する。
【選択図】図1
特許請求の範囲
【請求項1】
左車輪に対して設けられ、前記左車輪の車輪速度を検出する左車輪速度センサと、
前記左車輪と左右方向に対向して配置された右車輪に対して設けられ、前記右車輪の車輪速度を検出する右車輪速度センサと、
前記左車輪速度センサの検出値及び前記右車輪速度センサの検出値を受信するコンピュータと、
を備え、
前記コンピュータは、
前記左車輪速度センサの検出値に基づいて前記左車輪の車輪加速度である左車輪加速度を演算し、前記右車輪速度センサの検出値に基づいて前記右車輪の車輪加速度である右車輪加速度を演算し、
前記左車輪加速度及び前記右車輪加速度に基づいて路面の凹凸を検出した場合、路面の凹凸の検出を経過時間のカウントのトリガーとした所定期間における、前記左車輪加速度の最大値に関連する情報及び前記右車輪加速度の最大値に関連する情報に基づいて、検出した路面の凹凸が路面の補修対象でない特定段差であるか否かを判定する、
路面状態検出装置。
続きを表示(約 790 文字)
【請求項2】
前記コンピュータは、
前記所定期間内における、前記左車輪加速度の最大値と前記右車輪加速度の最大値との差である最大値差を演算し、
前記所定期間内における、前記左車輪加速度が最大値となった時点と前記右車輪加速度が最大値になった時点との時間差である最大値時間差を演算し、
前記最大値差及び前記最大値時間差に基づいて、路面の凹凸が前記特定段差であるか否かを判定する、
請求項1に記載の路面状態検出装置。
【請求項3】
前記所定期間内における車輪加速度の極大値のうち2番目に大きい値を第2極大値とすると、
前記コンピュータは、さらに、
前記所定期間内における、前記左車輪加速度が前記第2極大値となった時点と前記右車輪加速度が前記第2極大値となった時点との時間差である極大値時間差に基づいて、路面の凹凸が前記特定段差であるか否かを判定する、
請求項2に記載の路面状態検出装置。
【請求項4】
前記コンピュータは、さらに
前記所定期間内における、前記左車輪加速度が最小値となった時点と前記右車輪加速度が最小値になった時点との時間差である最小値時間差に基づいて、路面の凹凸が前記特定段差であるか否かを判定する、
請求項1~3の何れか一項に記載の路面状態検出装置。
【請求項5】
前記所定期間内における車輪加速度の極小値のうち2番目に小さい値を第2極小値とすると、
前記コンピュータは、さらに、
前記所定期間内における、前記左車輪加速度が前記第2極小値となった時点と前記右車輪加速度が前記第2極小値となった時点との時間差である極小値時間差に基づいて、路面の凹凸が前記特定段差であるか否かを判定する、
請求項4に記載の路面状態検出装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、路面状態検出装置に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
車輪速度センサの検出値を用いて路面の凹凸状態を判定する装置は、例えば特開昭60-596号公報に記載されている。この装置は、車輪速度センサの検出値から車輪加速度を演算し、分散や、最大値と最小値との差等に基づいて、路面の凹凸状態を判定する。
【先行技術文献】
【特許文献】
【0003】
特開昭60-596号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来の路面状態検出装置は、橋の継ぎ目などの路面補修が必要でない特定の段差も、ポットホールのような補修対象の凹凸と同様に、路面荒れとして検出する。つまり、従来の路面状態検出装置では、車輪に大きな入力があった場合、それが路面荒れによるものか、あるいは道路の継ぎ目によるものかは判断されなかった。したがって、従来の路面状態検出装置では、路面の補修計画において、ユーザが容易に補修の必要性を判断することができなかった。
【0005】
本発明の目的は、ユーザによる路面補修の要否の判断を容易にすることができる路面状態検出装置を提供することである。
【課題を解決するための手段】
【0006】
本発明の路面状態検出装置は、左車輪に対して設けられ、前記左車輪の車輪速度を検出する左車輪速度センサと、前記左車輪と左右方向に対向して配置された右車輪に対して設けられ、前記右車輪の車輪速度を検出する右車輪速度センサと、前記左車輪速度センサの検出値及び前記右車輪速度センサの検出値を受信するコンピュータと、を備える。前記コンピュータは、前記左車輪速度センサの検出値に基づいて前記左車輪の車輪加速度である左車輪加速度を演算し、前記右車輪速度センサの検出値に基づいて前記右車輪の車輪加速度である右車輪加速度を演算する。前記コンピュータは、前記左車輪加速度及び前記右車輪加速度に基づいて、路面の凹凸を検出する。前記コンピュータは、路面の凹凸を検出した場合、路面の凹凸の検出を経過時間のカウントのトリガーとした所定期間における、前記左車輪加速度の最大値に関連する情報及び前記右車輪加速度の最大値に関連する情報に基づいて、路面の凹凸が路面の補修対象でない特定段差であるか否かを判定する。
【発明の効果】
【0007】
本発明によれば、左右の車輪に対して同一の所定期間(一定期間)における、左右それぞれの車輪加速度の最大値に関連する情報に基づいて、検出した路面の凹凸が特定段差であるか否かが判定される。最大値に関連する情報は、例えば、最大値の大きさであったり、車輪加速度が最大値となった時点(時刻)であったりする。車両が橋の継ぎ目等の特定段差を通過した場合、左右の車輪は、同時且つ同じ大きさで変動する可能性が高い。つまり、コンピュータは、所定期間内の最大値に関連する情報、例えば左右の最大値及び/又は左右の最大値の取得時刻を参照することで、路面の凹凸が特定段差であるか否かを判定することができる。本発明によれば、特定段差とそうでない凹凸とを分類することができ、ユーザによる路面補修の要否の判断を容易にすることができる。
【図面の簡単な説明】
【0008】
本実施形態の路面状態検出装置の構成を示す概念図である。
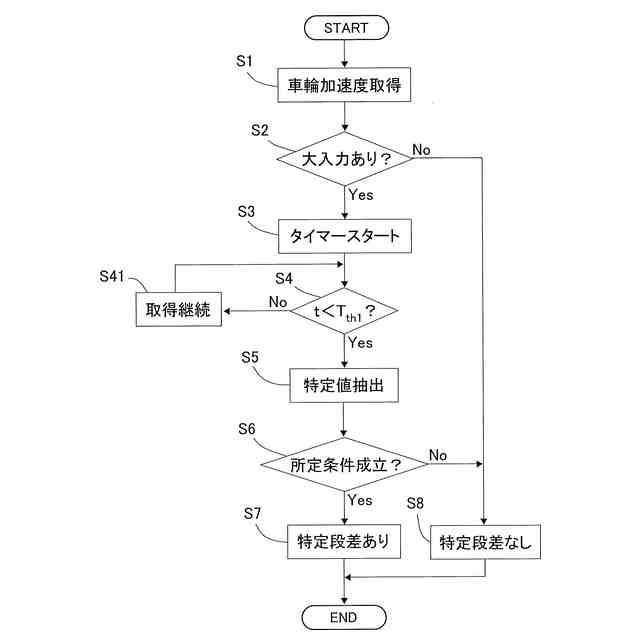
本実施形態の路面状態検出装置の制御例を示すフローチャートである。
本実施形態の各車輪の車輪加速度の変動例を示すタイムチャートである。
本実施形態の各車輪の車輪加速度の変動例を示すタイムチャートである。
【発明を実施するための形態】
【0009】
以下、本発明を実施するための形態として、本発明の一実施形態である路面状態検出装置1を、図を参照しつつ詳しく説明する。なお、本発明は、下記実施例の他、当業者の知識に基づいて種々の変更、改良を施した種々の形態で実施することができる。
【0010】
本実施形態の路面状態検出装置1は、図1に示すように、左車輪速度センサ2と、右車輪速度センサ3と、コンピュータ4と、を備えている。左車輪速度センサ2は、左車輪91に対して設けられ、左車輪91の車輪速度を検出する。右車輪速度センサ3は、左車輪91と左右方向に対向して配置された右車輪92に対して設けられ、右車輪92の車輪速度を検出する。左車輪91と右車輪92とは、車両前後方向において同じ位置に配置されている。つまり、本実施形態のように、車両が左右の前輪と左右の後輪を持つ4輪車である場合、左車輪91が左前輪であれば右車輪92は右前輪であり、左車輪91が左後輪であれば右車輪92は右後輪である。本説明では、左車輪91が左前輪であり、右車輪92が右前輪である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
他の特許を見る



 特許ウォッチ
特許ウォッチ