TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025015249
公報種別
公開特許公報(A)
公開日
2025-01-30
出願番号
2023118541
出願日
2023-07-20
発明の名称
ワーク供給装置およびワーク供給方法
出願人
テイ・エス テック株式会社
代理人
個人
,
個人
,
個人
主分類
B23P
19/00 20060101AFI20250123BHJP(工作機械;他に分類されない金属加工)
要約
【課題】手作業によらずワークを所定の向きにできるワーク供給装置およびワーク供給方法を提供する。
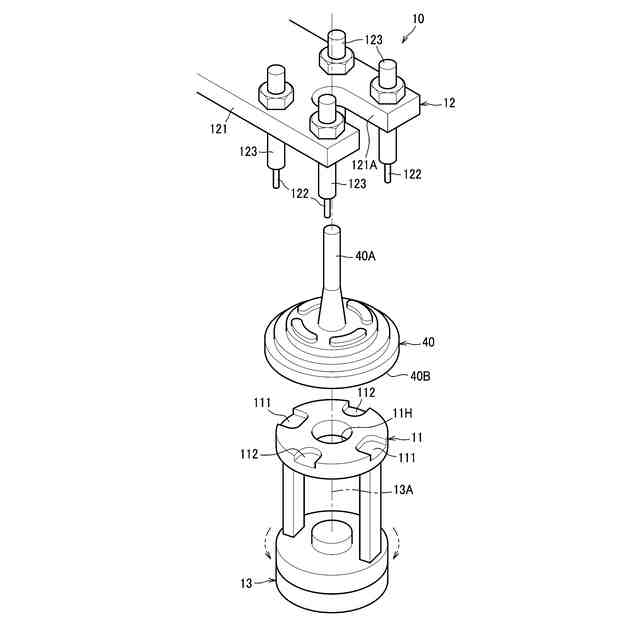
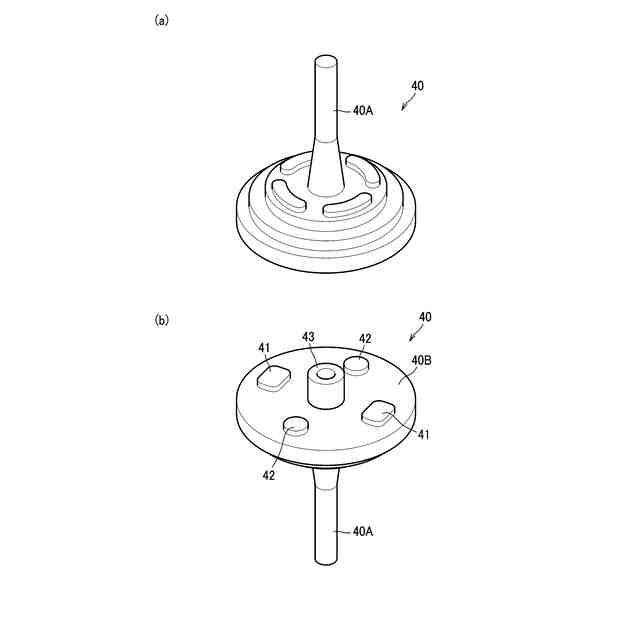
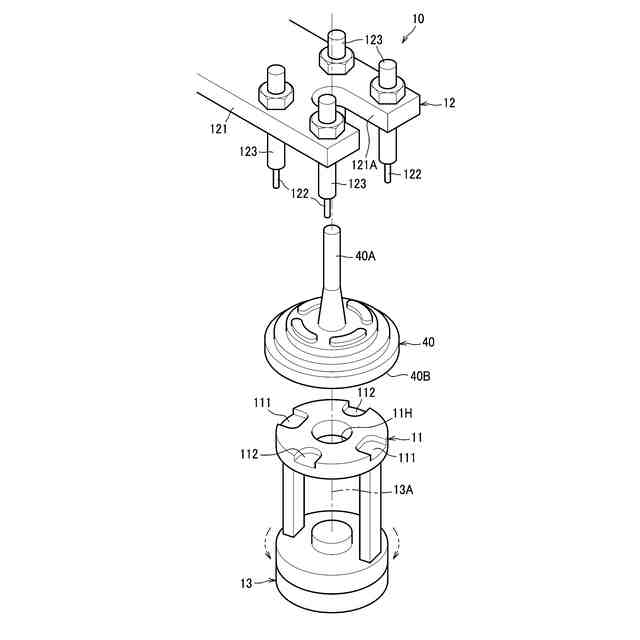
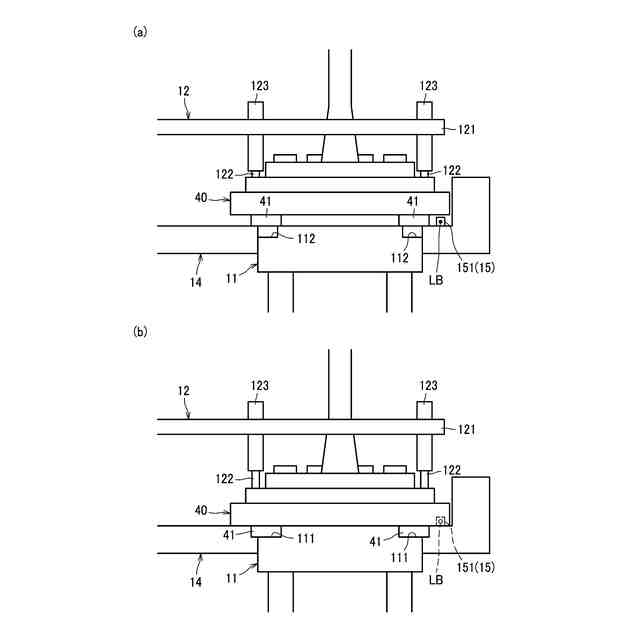
【解決手段】ワーク供給装置は、ワーク40の凹凸と嵌合可能な凹凸を有し、ワーク40を下から支持する支持台11と、ワーク40に上から接触してワーク40を支持台11に向けて押圧する押圧装置12と、支持台11を、ワーク40と支持台11が重なる方向に延びる軸13Aを中心として回転させるステッピングモータ13と、ワーク40の凹凸と支持台11の凹凸との嵌合を検出するための検出装置と、制御部とを備える。制御部は、ワーク40が支持台11の上に配置された後、押圧装置12によりワーク40を支持台11に向けて押圧しながら、ステッピングモータ13により支持台11を回転させ、検出装置の検出結果に基づいてワーク40の凹凸と支持台11の凹凸との嵌合を検出した後、支持台11の向きを所定の向きにして支持台11の回転を停止させる。
【選択図】図3
特許請求の範囲
【請求項1】
ワークを所定の向きにして供給するワーク供給装置であって、
前記ワークの凹凸と嵌合可能な凹凸を有し、前記ワークを下から支持する支持台と、
前記ワークに上から接触して前記ワークを前記支持台に向けて押圧する押圧装置と、
前記支持台を、前記ワークと前記支持台が重なる方向に延びる軸を中心として回転させる回転装置と、
前記ワークの凹凸と前記支持台の凹凸との嵌合を検出するための検出装置と、
制御部と、を備え、
前記制御部は、前記ワークが前記支持台の上に配置された後、
前記押圧装置により前記ワークを前記支持台に向けて押圧しながら、前記回転装置により前記支持台を回転させ、
前記検出装置の検出結果に基づいて前記ワークの凹凸と前記支持台の凹凸との嵌合を検出した後、前記支持台の向きを所定の向きにして前記支持台の回転を停止させることを特徴とするワーク供給装置。
続きを表示(約 2,200 文字)
【請求項2】
前記検出装置は、前記ワークと前記支持台との間の隙間を検出可能であり、
前記制御部は、前記検出装置の、前記隙間が所定以下になったという検出結果に基づいて前記ワークの凹凸と前記支持台の凹凸との嵌合を検出することを特徴とする請求項1に記載のワーク供給装置。
【請求項3】
ロボットハンドをさらに備え、
前記ロボットハンドは、
ロボットアームに取り付けられるハンド部であって、前記ワークを保持するハンド部と、
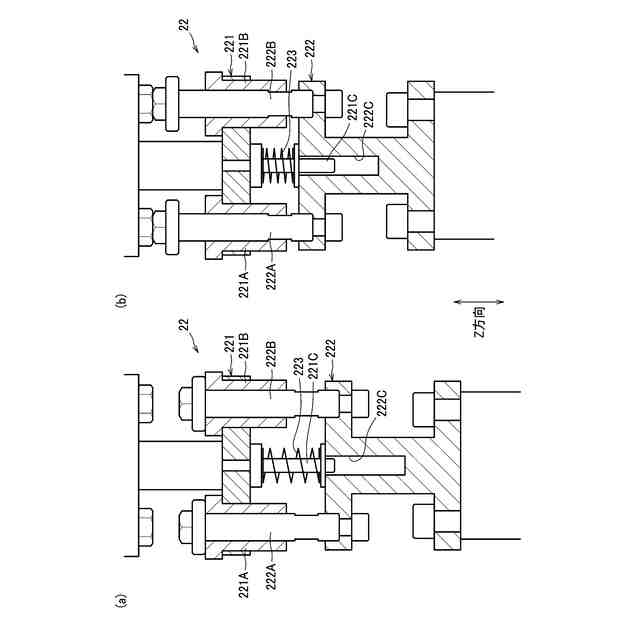
前記ロボットアームと前記ハンド部との間に配置された第1フローティング機構であって、前記ロボットアームから前記ハンド部に向かう方向であるZ方向に前記ハンド部を移動可能に支持する第1フローティング機構と、
前記ロボットアームと前記ハンド部との間に配置された第2フローティング機構であって、前記Z方向と直交するX方向に前記ハンド部を移動可能に支持するとともに、前記Z方向および前記X方向の両方と直交するY方向に前記ハンド部を移動可能に支持する第2フローティング機構と、
を備えることを特徴とする請求項1に記載のワーク供給装置。
【請求項4】
前記ハンド部は、
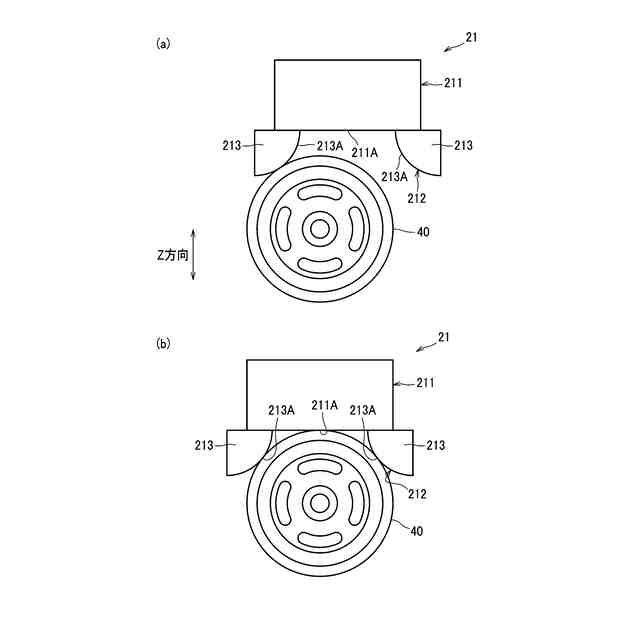
磁力により前記ワークを吸着する吸着部と、
前記ワークを前記吸着部に誘い込む凹み形状の誘い込み部であって、前記吸着部から前記ハンド部の先端に向かうにつれて幅が広くなる誘い込み部と、を有することを特徴とする請求項3に記載のワーク供給装置。
【請求項5】
前記第1フローティング機構は、
第1ベース部と、
前記第1ベース部に対して前記Z方向に移動可能となるように前記第1ベース部に支持された第1可動部と、
前記第1可動部を前記Z方向において前記第1ベース部から離れる方向に付勢するバネと、を有することを特徴とする請求項3に記載のワーク供給装置。
【請求項6】
前記第2フローティング機構は、
第2ベース部と、
前記第2ベース部に対して前記X方向および前記Y方向に移動可能となるように前記第2ベース部に支持された第2可動部と、
前記第2ベース部に対する前記第2可動部の移動をロックするロック状態と、前記第2ベース部に対する前記第2可動部の移動を許容するロック解除状態とに切り替え可能なロック機構と、を有することを特徴とする請求項3に記載のワーク供給装置。
【請求項7】
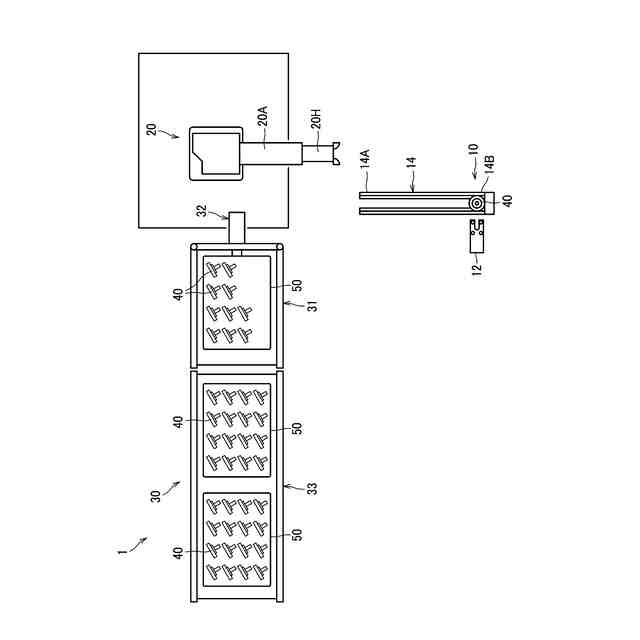
前記ワークが収容された収容箱を、前記ロボットハンドが前記ワークをピックアップするピック位置まで移動させるローラコンベアであって、前記収容箱が供給される側の端部である第1端部から、前記第1端部とは反対側の第2端部に近づくにつれて下に位置するように傾斜したローラコンベアと、
前記ローラコンベアの前記第2端部に設けられた衝撃吸収機構であって、前記収容箱を前記ピック位置に停止させる、エアシリンダを有してなる衝撃吸収機構と、をさらに備えることを特徴とする請求項3に記載のワーク供給装置。
【請求項8】
前記ローラコンベアは、前記第1端部が前記第2端部よりも上に位置するように傾斜する第1傾斜位置と、前記第2端部が前記第1端部よりも上に位置するように傾斜する第2傾斜位置との間で回動可能であり、
ワーク供給装置は、
前記第1傾斜位置に位置する前記ローラコンベアの第1端部につながる供給コンベアであって、前記第1傾斜位置に位置する前記ローラコンベアに前記収容箱を供給する供給コンベアと、
前記供給コンベアの下に配置され、前記第2傾斜位置に位置する前記ローラコンベアの第1端部につながる排出コンベアであって、前記第2傾斜位置に位置する前記ローラコンベアから前記収容箱が排出される排出コンベアと、をさらに備えることを特徴とする請求項7に記載のワーク供給装置。
【請求項9】
前記ローラコンベアの回動軸から前記第1端部までの長さは、前記回動軸から、前記ピック位置に位置する前記収容箱の前記第1端部に近い端部であって前記回動軸から最も遠い部分までの長さよりも長いことを特徴とする請求項8に記載のワーク供給装置。
【請求項10】
ワークを所定の向きにして供給するワーク供給装置であって、
前記ワークの凹凸と嵌合可能な凹凸を有し、前記ワークを下から支持する支持台と、
前記ワークに上から接触して前記ワークを前記支持台に向けて押圧する押圧装置と、
前記支持台を、前記ワークと前記支持台が重なる方向に延びる軸を中心として回転させる回転装置と、
前記ワークの凹凸と前記支持台の凹凸との嵌合を検出するための検出装置と、
を備えるワーク供給装置を用いるワーク供給方法であって、
前記ワークが前記支持台の上に配置された後、
前記押圧装置により前記ワークを前記支持台に向けて押圧しながら、前記回転装置により前記支持台を回転させ、
前記検出装置の検出結果に基づいて前記ワークの凹凸と前記支持台の凹凸との嵌合を検出した後、前記支持台の向きを所定の向きにして前記支持台の回転を停止させることを特徴とするワーク供給方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ワーク供給装置およびワーク供給方法に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
ワーク供給装置として、例えば、円盤形状のワークを1枚ずつ供給できるものが知られている(特許文献1)。
【先行技術文献】
【特許文献】
【0003】
特開2022-021760号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、ワークを供給する際に、ワークを所定の向きにしておくことが必要な場合がある。従来は、手作業でワークを所定の向きにしていた。
そこで、手作業によらずワークを所定の向きにできることが望まれる。
【課題を解決するための手段】
【0005】
ワーク供給装置は、ワークを所定の向きにして供給するワーク供給装置であって、前記ワークの凹凸と嵌合可能な凹凸を有し、前記ワークを下から支持する支持台と、前記ワークに上から接触して前記ワークを前記支持台に向けて押圧する押圧装置と、前記支持台を、前記ワークと前記支持台が重なる方向に延びる軸を中心として回転させる回転装置と、前記ワークの凹凸と前記支持台の凹凸との嵌合を検出するための検出装置と、制御部と、を備える。
前記制御部は、前記ワークが前記支持台の上に配置された後、前記押圧装置により前記ワークを前記支持台に向けて押圧しながら、前記回転装置により前記支持台を回転させ、前記検出装置の検出結果に基づいて前記ワークの凹凸と前記支持台の凹凸との嵌合を検出した後、前記支持台の向きを所定の向きにして前記支持台の回転を停止させる。
【0006】
支持台の上に配置されたワークを押圧装置により支持台に向けて押圧しながら、回転装置により支持台を回転させ、検出装置の検出結果に基づいてワークと支持台との嵌合を検出した後、支持台の向きを所定の向きにして支持台の回転を停止させることで、手作業によらずワークを所定の向きにできる。
【0007】
前記検出装置は、前記ワークと前記支持台との間の隙間を検出可能であり、前記制御部は、前記検出装置の、前記隙間が所定以下になったという検出結果に基づいて前記ワークの凹凸と前記支持台の凹凸との嵌合を検出する構成であってもよい。
【0008】
検出装置が、ワークと支持台との間の隙間を検出可能なことで、コストを抑制できる。
【0009】
ワーク供給装置は、ロボットハンドをさらに備え、前記ロボットハンドは、ロボットアームに取り付けられるハンド部であって、前記ワークを保持するハンド部と、前記ロボットアームと前記ハンド部との間に配置された第1フローティング機構であって、前記ロボットアームから前記ハンド部に向かう方向であるZ方向に前記ハンド部を移動可能に支持する第1フローティング機構と、前記ロボットアームと前記ハンド部との間に配置された第2フローティング機構であって、前記Z方向と直交するX方向に前記ハンド部を移動可能に支持するとともに、前記Z方向および前記X方向の両方と直交するY方向に前記ハンド部を移動可能に支持する第2フローティング機構と、を備える構成であってもよい。
【0010】
ロボットハンドが、第1フローティング機構と、第2フローティング機構とを備えることで、ハンド部でワークを保持する際のワークの位置のばらつきを吸収できる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
他の特許を見る



 特許ウォッチ
特許ウォッチ