TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025015013
公報種別
公開特許公報(A)
公開日
2025-01-30
出願番号
2023118061
出願日
2023-07-20
発明の名称
工具ブラケット
出願人
株式会社スギノマシン
代理人
弁理士法人グローバル・アイピー東京
主分類
B23D
79/00 20060101AFI20250123BHJP(工作機械;他に分類されない金属加工)
要約
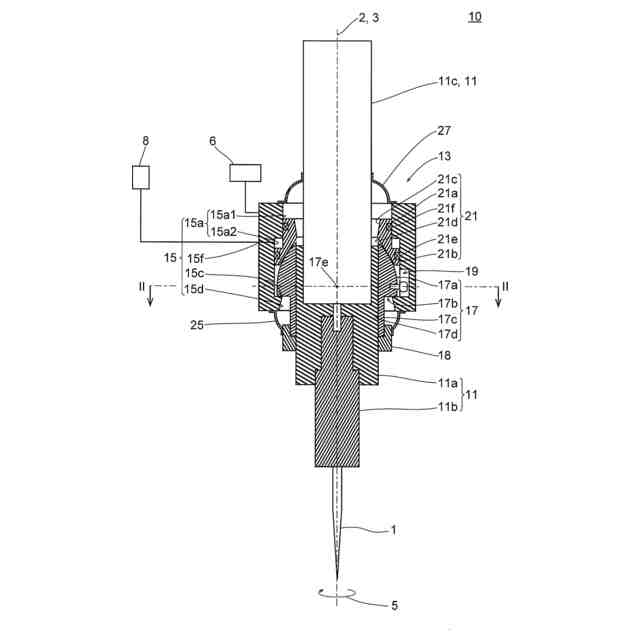
【課題】 スピンドル体を挿入し、スピンドル体が滑らかに傾動できる工具ブラケットを提供する。
【解決手段】 工具ブラケット10は、シリンダ軸2方向に延びるシリンダ室15aを有するハウジング15と、傾動中心17eを中心に傾動する傾動軸3を有し、スピンドル体11が装着され、シリンダ軸2に対して傾動可能な傾動ボディ17と、傾動軸3から径方向に延び、傾動ボディ17に配置される回り止め体19bと、シリンダ軸2方向に沿って延び、ハウジング15に配置される受容溝19aと、を有する。
【選択図】図1
特許請求の範囲
【請求項1】
シリンダ軸方向に延びるシリンダ室を有するハウジングと、
傾動中心を中心に傾動する傾動軸を有し、スピンドル体が装着され、前記シリンダ軸に対して傾動可能な傾動ボディと、
前記傾動軸から径方向に延び、前記傾動ボディに配置される回り止め体と、
前記シリンダ軸方向に沿って延び、前記ハウジングに配置される受容溝と、
を有する、工具ブラケット。
続きを表示(約 400 文字)
【請求項2】
前記回り止め体は、前記傾動中心を通り、前記傾動軸に垂直な平面上に延びる、
請求項1に記載の工具ブラケット。
【請求項3】
前記受容溝は、前記シリンダ軸を通る平面である当接面を有する、
請求項1又は2に記載の工具ブラケット。
【請求項4】
前記回り止め体は、前記当接面と当接する膨出部を有する、
請求項1~3のいずれかに記載の工具ブラケット。
【請求項5】
前記膨出部は、球状である、
請求項4に記載の工具ブラケット。
【請求項6】
先端部に配置される作用部を有し、先端方向に付勢され、前記シリンダ室内を往復するピストンを更に有し、
前記傾動ボディは、前記シリンダ室内に配置され、前記作用部と当接するセンタリング部を有する、
請求項1~5のいずれかに記載の工具ブラケット。
発明の詳細な説明
【技術分野】
【0001】
本発明は、工具ブラケットに関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
工具が傾動できるバリ取り工具が提案されている(特開2022-074292号公報。以下、特許文献1)。特許文献1のバリ取り工具100は、シャンク軸15に沿って配置されたシャンク11を有するハウジング1と、伝達ロッド3と、傾動シャフト4と、傾き修正機構9を有する。傾動シャフト4は、フランジ部41と、伝達ロッドが貫通する受容部41aと、刃物101を保持するロッド部42と、シャンク軸15上に傾動中心25を有する球面ブッシュ24とを有する。傾動シャフト4は、傾動中心25を中心に傾動できる。
【発明の概要】
【発明が解決しようとする課題】
【0003】
特許文献1のバリ取り工具は、マシニングセンタ等の回転主軸に装着される。そのため、特許文献1のバリ取り工具は、例えば、回転主軸を有しないロボットには適用できない。
本発明は、スピンドル体を挿入し、スピンドル体が滑らかに傾動できる工具ブラケットを提供することを目的とする。
【課題を解決するための手段】
【0004】
本発明の第1の観点は、
シリンダ軸方向に延びるシリンダ室を有するハウジングと、
傾動中心を中心に傾動する傾動軸を有し、スピンドル体が装着され、前記シリンダ軸に対して傾動可能な傾動ボディと、
前記傾動軸から径方向に延び、前記傾動ボディに配置される回り止め体と、
前記シリンダ軸方向に沿って延び、前記ハウジングに配置される受容溝と、
を有する、工具ブラケットである。
【0005】
本発明の第2の観点は、
シリンダ軸方向に延びるシリンダ室を有するハウジングと、
圧縮性流体によって先端方向に付勢され、前記シリンダ室内を往復するピストンであって、先端部に配置される作用部を有するピストンと、
傾動軸を有し、前記シリンダ室内に配置され、前記シリンダ軸に対して傾動可能な傾動ボディであって、基端部に配置され、前記作用部と当接するセンタリング部であって、前記傾動軸が前記シリンダ軸から傾斜するときに、前記シリンダ軸を作用線として、前記ピストンを押し出すセンタリング部を有する傾動ボディと、
を有する、工具ブラケットである。
【発明の効果】
【0006】
本発明の工具ブラケットによれば、スピンドル体を挿入し、スピンドル体が滑らかに傾動できる。
【図面の簡単な説明】
【0007】
傾動していない状態の実施形態1のバリ取り工具の縦断面図
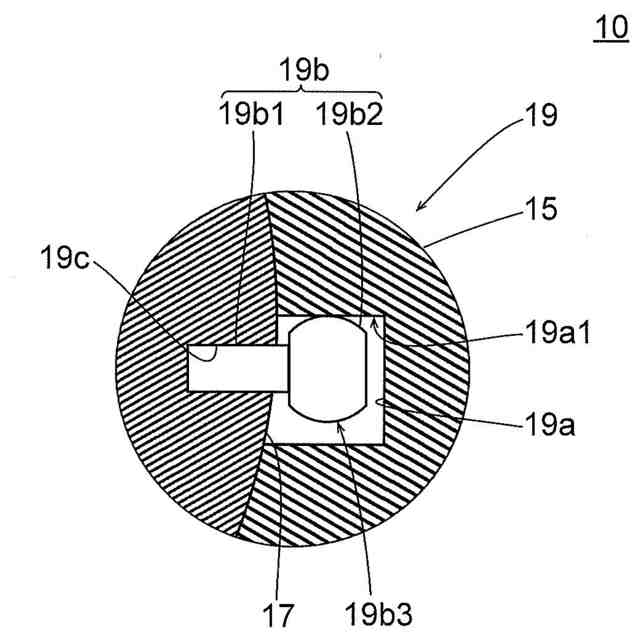
図1のII-II線断面図
図2のIII部拡大図
傾動した状態の実施形態1のバリ取り工具の縦断面図
図4のV-V線断面図
【発明を実施するための形態】
【0008】
<実施形態1>
図1に示すように、本実施形態のバリ取り工具10は、工具ブラケット13と、スピンドル体11と、を有する。図1は、図2のI-I線断面図である。図1は、スピンドル体11が傾動していない状態を示す。図1において、シリンダ軸2(図4参照)と、傾動軸3(図4参照)は一致している。
バリ取り工具10は、ロボット6やエア源8と接続される。
【0009】
工具ブラケット13は、ハウジング15と、ピストン21と、傾動ボディ17と、カップリング18と、回り止め19と、基端カバー27と、先端カバー25と、を有する。
ハウジング15は、中空形状である。ハウジング15の内部に、基端から、ピストン21と、傾動ボディ17と、回り止め19と、が配置される。
【0010】
ハウジング15は、基端部から、シリンダ室15aと、座面15cと、先端開口15dと、を順に有する。ハウジング15は、例えば、ロボット6のアームの先端に取り付けられる。図2に示すように、ハウジング15は、直方体状の外形を有しても良い。シリンダ室15aは、シリンダ軸2を中心に配置される。図1に示すように、シリンダ室15aは、シリンダ部15a2と、小径案内部15a1とを有する。シリンダ部15a2は、ハウジング15の中央部に配置される。小径案内部15a1は、シリンダ部15a2よりも小径である。小径案内部15a1は、シリンダ部15a2に接続され、ハウジング15の基端に開口する。座面15cは、ハウジング15の先端部に配置される。座面15cは、シリンダ軸2に垂直な平面である。座面15cは、回り止め19を介して、シリンダ室15aに接続される。先端開口15dは、座面15cからハウジング15の先端に開口する。好ましくは、先端開口15dは、先端に向かうにつれて径が大きくなる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
他の特許を見る



 特許ウォッチ
特許ウォッチ