TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025015005
公報種別
公開特許公報(A)
公開日
2025-01-30
出願番号
2023118052
出願日
2023-07-20
発明の名称
作業計画立案システム及び作業計画立案方法
出願人
株式会社日立製作所
代理人
弁理士法人信友国際特許事務所
主分類
G06Q
10/06 20230101AFI20250123BHJP(計算;計数)
要約
【課題】人手による作業計画の立案により立案者のノウハウを取り込み、自動化による作業計画の立案が可能な作業計画立案システムを提供する。
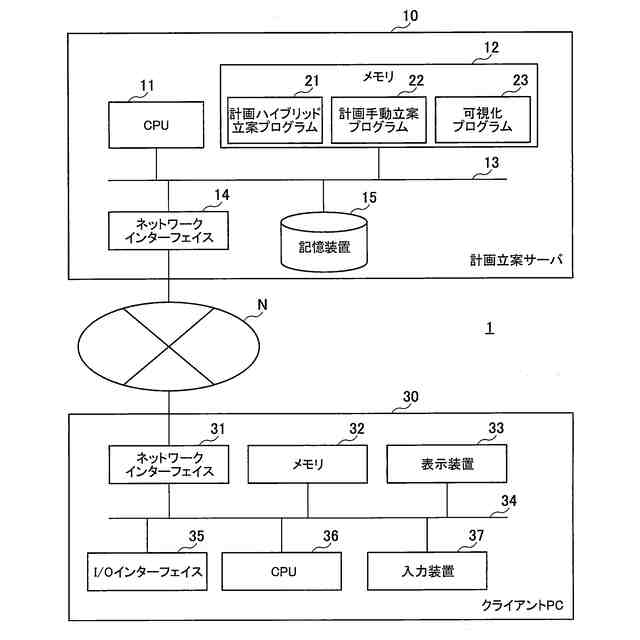
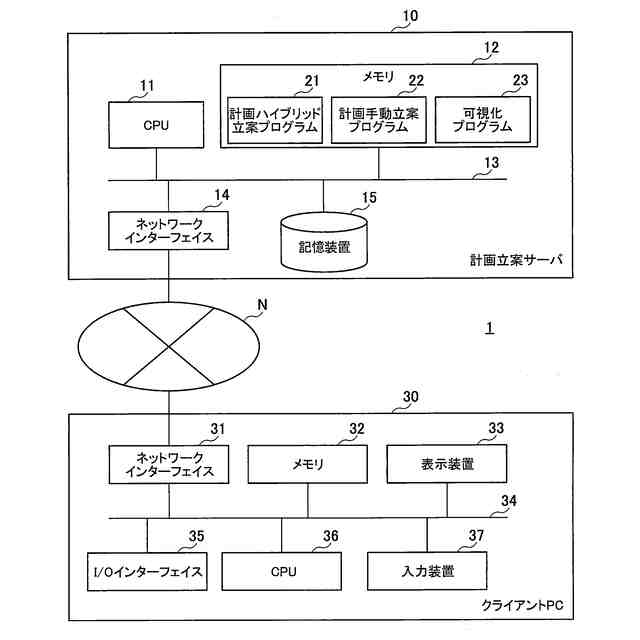
【解決手段】作業計画立案システム1は、作業計画を可視化した画面を出力する可視化プログラム23と、手動で設定される条件で絞り込まれた案件に対して、手動で入力される操作により作業計画を立案する計画手動立案プログラム22と、組み合わせ数が一定値以下になると、自動で作業計画を立案し、数理最適化技術を用いて自動で立案した作業計画を可視化プログラム23に可視化させる計画ハイブリッド立案プログラム21と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
作業員を作業現場に割り当てる作業計画を可視化した画面を出力する可視化部と、
手動で設定される条件で絞り込まれた案件に対して、手動で入力される操作により前記作業計画を立案する計画手動立案部と、
手動で立案された前記作業計画に割り当てられる、複数の前記作業現場の組み合わせ数が一定値以下になるまで、前記計画手動立案部の処理と、前記計画手動立案部で立案された前記作業計画を前記可視化部が前記画面に出力する処理とが繰り返され、前記組み合わせ数が一定値以下になると、数理最適化技術を用いて自動で前記作業計画を立案し、自動で立案した前記作業計画を前記可視化部に可視化させる計画ハイブリッド立案部と、を備える
作業計画立案システム。
続きを表示(約 1,300 文字)
【請求項2】
前記可視化部は、前記作業員ごとに、前記作業現場、及び前記作業現場で行われる作業の作業時間と、前記案件を割り当てられない情報とが示されるガントチャートを含む前記画面を出力する
請求項1に記載の作業計画立案システム。
【請求項3】
前記計画手動立案部は、前記作業計画を割り当てた前記作業の計画割り当てフラグを済に更新し、
前記計画ハイブリッド立案部は、前記計画割り当てフラグが済に更新された前記作業以外の前記作業を対象として、前記作業の組み合わせ数を計算する
請求項2に記載の作業計画立案システム。
【請求項4】
前記可視化部は、地図に前記作業現場を表すノードを可視化し、
前記計画手動立案部は、前記作業計画に選択可能な前記ノードが前記ガントチャートに配置される操作、又は、前記ノードと他のノードとが繋がれる操作により、前記作業を前記作業計画に割り当てる
請求項3に記載の作業計画立案システム。
【請求項5】
前記可視化部は、手動で選択される条件により前記案件の検索指示が行われる条件検索部と、前記条件を満たす案件の作業現場が前記作業員の巡回経路と共に表示される経路表示部と、前記作業員毎に前記作業計画の詳細が表示される作業員毎計画表示部と、を含む前記画面を出力する
請求項4に記載の作業計画立案システム。
【請求項6】
前記可視化部は、前記計画ハイブリッド立案部により立案された前記作業計画の前記巡回経路を示す画面を前記作業員毎に出力し、
前記計画手動立案部は、前記作業員の移動効率を下げる前記作業現場が前記巡回経路に含まれている場合に、他の作業員の前記巡回経路に前記作業現場を組み入れて前記作業計画を修正する
請求項5に記載の作業計画立案システム。
【請求項7】
前記条件は、前記作業員の担当作業、前記作業員の作業種別、作業希望日、前記作業の対応期限を超過した作業、前記対応期限までの日数、前記作業現場までの移動時間、及び作業時間のうち、少なくとも一つを含む
請求項6に記載の作業計画立案システム。
【請求項8】
可視化部と、計画手動立案部と、計画ハイブリッド立案部と、を備える作業計画立案システムで行われる計画立案方法であって、
作業員を作業現場に割り当てる作業計画を可視化した画面を前記可視化部が出力するステップと、
手動で設定される条件で絞り込まれた案件に対して、手動で入力される操作により前記作業計画を立案するステップと、
前記計画ハイブリッド立案部が、手動で立案された前記作業計画に割り当てられる、複数の前記作業現場の組み合わせ数が一定値以下になるまで、前記計画手動立案部の処理と、前記計画手動立案部で立案された前記作業計画を前記可視化部が前記画面に出力する処理とが繰り返され、前記組み合わせ数が一定値以下になると、数理最適化技術を用いて自動で前記作業計画を立案し、自動で立案した前記作業計画を前記可視化部に可視化させるステップと、を含む
作業計画立案方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業計画立案システム及び作業計画立案方法に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
従来、エレベーター等の社会インフラストラクチャの設備を点検するため、設備に作業員が出向いていた。作業員が担当する設備は、複数の建屋、複数の地域にまたがることがあり、作業員は事前に移動時間、作業時間を検討して、設備を回る計画を立案するための時間が必要であった。
【0003】
近年では、数理最適化技術の発展により、数理最適化技術を適用した計画立案業務は自動化されつつある。例えば、特許文献1には、「各作業員における各作業への適合性を所定アルゴリズムで推定して、当該推定した適合性の高さに応じて各作業に割り当てる作業員候補を特定し、各作業の情報とその作業員候補の情報とに基づき、所定の作業計画立案アルゴリズムによって、各作業に関する所定の制約条件を満たすよう各作業間の実施順と割当作業員を決定し、作業計画を生成する」と記載されている。
【先行技術文献】
【特許文献】
【0004】
特開2017-062656号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、計画立案業務には依然として、以下に説明する課題(1)乃至(3)が残っている。
【0006】
(1)数理最適化技術を用いて計画立案業務を自動化する場合の課題
計画立案の対象となる案件数が多いと、案件ごとに作業現場の組み合わせ数が増加し、組み合わせ爆発が発生する。このため、前処理で組み合わせ数を削減しない限り、計画の立案時間が長くなってしまう。前処理で組み合わせ数を削減するためには、暗黙知である計画立案者のノウハウを言語化し、制約条件として組み込む必要がある。しかし、ノウハウは暗黙知であるため、制約条件に計画立案者のノウハウを組み込むには、手間が掛かる。また、自動立案された結果には、計画立案者の意向やその日の最新状況を全て反映できていない可能性がある。
【0007】
(2)従来通り人手で計画を手動立案する場合の課題
コールセンターのオペレーター等、計画立案者に作業現場周辺の土地勘が無い場合がある。この場合、計画立案者は、案件の位置情報を基に、案件ごとの位置関係や移動時間を考慮した、移動効率や生産性が高い計画の立案が困難である。このため、立案に慣れた計画立案者でなければ適切な立案ができず、属人化の原因となっている。
計画立案者に土地勘がある場合においても、案件の作業希望日や対応期限、作業時間、案件間の移動時間、作業員のシフトなどの多くの情報を考慮する必要がある。それらの情報を考慮した上で、作業員の作業可能時間の範囲内で計画を立案しなければならず、立案工数が大きくなる。また、移動効率や生産性が高い計画の立案は困難であった。
【0008】
(3)自動立案と手動立案の共通課題
計画立案者が作業員毎に計画を立案した結果、個別最適した計画を立案することは可能である。しかし、異なる作業員が近い案件を対応する計画を立案してしまう等、作業員全体としての移動効率や生産性を考慮した全体最適の実現は困難であった。
【0009】
このように、社会インフラストラクチャの設備の保守計画立案業務は計画立案対象の設備数が多く、前処理で組み合わせを削減しない限り、計画の立案時間が長くなる。また、計画立案業務の自動化と手動を両立し、手動で立案した計画案を基に数理最適化技術を適用する装置が存在していない。
【0010】
特許文献1に開示された技術は、数理最適化技術で立案した結果をもとに、手動で計画を変更可能ではある。しかし、手動で作成した計画案をベースに計画最適化の技術を適用することができない。このため、自動立案結果に満足できない場合、手動で計画の再作成が必要であった。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
他の特許を見る

 特許ウォッチ
特許ウォッチ