TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025012511
公報種別
公開特許公報(A)
公開日
2025-01-24
出願番号
2023115390
出願日
2023-07-13
発明の名称
識別装置及びそれを有するロボット
出願人
国立大学法人九州工業大学
代理人
個人
,
個人
,
個人
主分類
G01L
5/00 20060101AFI20250117BHJP(測定;試験)
要約
【課題】対象物に接することによってその対象物を識別可能な識別装置及びそれを有するロボットを提供する。
【解決手段】対象物を識別する識別装置10であって、対象物から力を与えられて弾性変形し電気抵抗特性が変化する電気伝導体11、11aと、電気伝導体11、11aに電圧を印加する入力電極12、12aと、電圧が印加された状態の電気伝導体11、11aの異なる箇所からそれぞれ電気信号を取り出す複数の出力電極13、13aと、各出力電極13、13aにより取り出された電気信号を入力値として、機械学習により、電気伝導体12、12aに力を与えている対象物の識別処理を行う識別処理部14とを備える。
【選択図】図1
特許請求の範囲
【請求項1】
対象物を識別する識別装置であって、
前記対象物から力を与えられて弾性変形し電気抵抗特性が変化する電気伝導体と、
前記電気伝導体に電圧を印加する入力電極と、
電圧が印加された状態の前記電気伝導体の異なる箇所からそれぞれ電気信号を取り出す複数の出力電極と、
前記各出力電極により取り出された前記電気信号を入力値として、機械学習により、前記電気伝導体に力を与えている前記対象物の識別処理を行う識別処理部とを備えることを特徴とする識別装置。
続きを表示(約 820 文字)
【請求項2】
請求項1記載の識別装置において、前記電気伝導体は複数あって、該複数の電気伝導体で前記対象物を挟むことを特徴とする識別装置。
【請求項3】
請求項1又は2記載の識別装置において、前記電気伝導体が一側に取り付けられたベース体を備え、前記入力電極及び前記複数の出力電極は前記ベース体の他側から突出していることを特徴とする識別装置。
【請求項4】
請求項3記載の識別装置において、前記ベース体の一側に、前記入力電極に電気的に接続された入力端子部及び前記複数の出力電極に電気的にそれぞれ接続された複数の出力端子部が設けられ、前記電気伝導体は、前記ベース体の一側にシランカップリング剤により接着されて、前記入力端子部及び前記複数の出力端子部に接していることを特徴とする識別装置。
【請求項5】
請求項1又は2記載の識別装置において、前記電気伝導体は板状であって、厚みが0.1mm以上3mm以下であることを特徴とする識別装置。
【請求項6】
対象物を把持する把持部及び前記把持部の回転又は移動を制御する制御手段を有するロボットであって、
前記把持部に、把持している前記対象物を識別する識別装置全体又は一部を設け、
前記識別装置は、
前記対象物から力を与えられて弾性変形し電気抵抗特性が変化する電気伝導体と、
前記電気伝導体に電圧を印加する入力電極と、
電圧が印加された状態の前記電気伝導体の異なる箇所からそれぞれ電気信号を取り出す複数の出力電極と、
前記各出力電極により取り出された前記電気信号を入力値として、機械学習により、前記電気伝導体に力を与えている前記対象物の識別処理を行う識別処理部とを備え、
前記制御手段は、前記識別装置による前記対象物の識別結果に基づいて前記把持部の動作を制御することを特徴とするロボット。
発明の詳細な説明
【技術分野】
【0001】
本発明は、対象物を識別する識別装置及びそれを有するロボットに関する。
続きを表示(約 2,700 文字)
【背景技術】
【0002】
物の種類等に応じてその物に異なる処理を行ったりその物を把持する力を調整したりする現場では、物を識別する識別装置がしばしば使用される。従来の識別装置には、対象物に貼付されたバーコードを読み取って物を識別するものや(特許文献1参照)、対象物をカメラで撮像した画像を基に識別を行うものがあった(特許文献2参照)。バーコードを利用する場合、バーコードを事前に対象物に付すことが求められるが、カメラで撮像した画像を利用する場合、特定のものを事前に対象物に付す必要がないというメリットがある。
【先行技術文献】
【特許文献】
【0003】
特開2013-010150号公報
特開2019-133516号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、カメラで撮像した画像を基に対象物を識別し、対象物を把持した後、識別結果に応じて異なる場所に対象物を移動させたり、把持する力の大きさを変えたりする場合、対象物を把持する装置とは別にカメラを設ける必要があった。この点、対象物に接することでその対象物を識別する機構があれば、対象物を把持する装置が対象物の識別も兼ねることができ有効である。
本発明は、かかる事情に鑑みてなされたもので、対象物に接することによってその対象物を識別可能な識別装置及びその識別装置を有するロボットを提供することを目的とする。
【課題を解決するための手段】
【0005】
前記目的に沿う第1の発明に係る識別装置は、対象物を識別する識別装置であって、前記対象物から力を与えられて弾性変形し電気抵抗特性が変化する電気伝導体と、前記電気伝導体に電圧を印加する入力電極と、電圧が印加された状態の前記電気伝導体の異なる箇所からそれぞれ電気信号を取り出す複数の出力電極と、前記各出力電極により取り出された前記電気信号を入力値として、機械学習により、前記電気伝導体に力を与えている前記対象物の識別処理を行う識別処理部とを備える。
【0006】
前記目的に沿う第2の発明に係るロボットは、対象物を把持する把持部及び前記把持部の回転又は移動を制御する制御手段を有するロボットであって、前記把持部に、把持している前記対象物を識別する識別装置全体又は一部を設け、前記識別装置は、前記対象物から力を与えられて弾性変形し電気抵抗特性が変化する電気伝導体と、前記電気伝導体に電圧を印加する入力電極と、電圧が印加された状態の前記電気伝導体の異なる箇所からそれぞれ電気信号を取り出す複数の出力電極と、前記各出力電極により取り出された前記電気信号を入力値として、機械学習により、前記電気伝導体に力を与えている前記対象物の識別処理を行う識別処理部とを備え、前記制御手段は、前記識別装置による前記対象物の識別結果に基づいて前記把持部の動作を制御する。
【発明の効果】
【0007】
第1の発明に係る識別装置は、対象物から力を与えられて弾性変形し電気抵抗特性が変化する電気伝導体と、電気伝導体に電圧を印加する入力電極と、電圧が印加された状態の電気伝導体の異なる箇所からそれぞれ電気信号を取り出す複数の出力電極と、各出力電極により取り出された電気信号を入力値として、機械学習により、電気伝導体に力を与えている対象物の識別処理を行う識別処理部とを備えるので、対象物に接することによってその対象物を識別可能である。
また、第2の発明に係るロボットは、第1の発明に係る識別装置を有するので、識別装置が対象物に接することによってその対象物を識別可能である。
【図面の簡単な説明】
【0008】
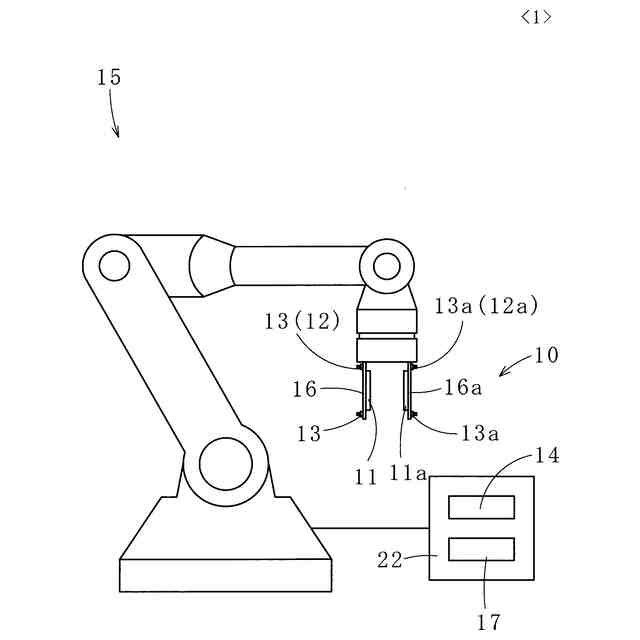
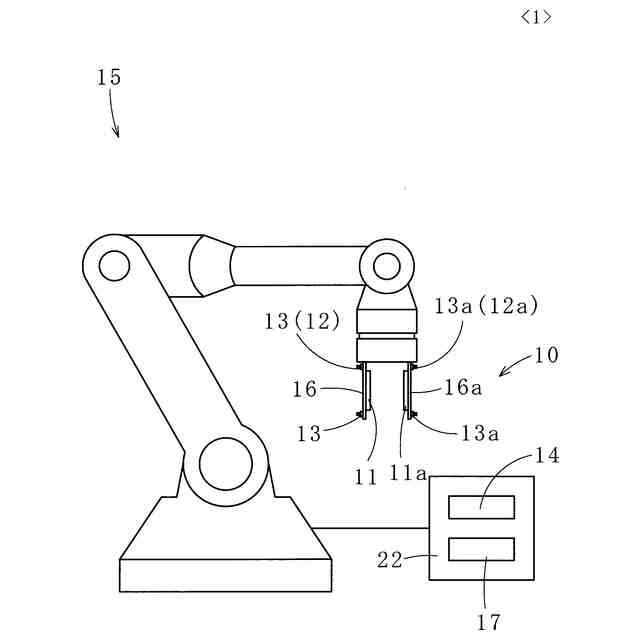
本発明の一実施の形態に係る識別装置を具備するロボットの説明図である。
電気伝導体のベース体への取り付けを示す説明図である。
入力端子部及び出力端子部の配置を示す説明図である。
(A)、(B)はそれぞれ、出力電極の電圧の計測結果を示す説明図である。
(A)、(B)はそれぞれ、出力電極の電圧の計測結果を示す説明図である。
(A)、(B)はそれぞれ、対象サンプルの判定結果を示す説明図である。
(A)、(B)はそれぞれ、対象サンプルの判定結果を示す説明図である。
対象サンプルの判定の正確性を数値で表した結果を示す説明図である。
(A)、(B)はそれぞれ、出力電極の電圧の計測結果を示す説明図である。
(A)、(B)はそれぞれ、出力電極の電圧の計測結果を示す説明図である。
(A)、(B)はそれぞれ、対象サンプルの判定結果を示す説明図である。
(A)、(B)はそれぞれ、対象サンプルの判定結果を示す説明図である。
制御手段の接続を示すブロック図である。
【発明を実施するための形態】
【0009】
続いて、添付した図面を参照しつつ、本発明を具体化した実施の形態につき説明し、本発明の理解に供する。
図1~図3に示すように、本発明の一実施の形態に係る識別装置10は、対象物(図示を省略する)を識別する装置であって、対象物から力を与えられて弾性変形する電気伝導体11、11aと、電気伝導体11に電圧を印可する入力電極12と、電気伝導体11aに電圧を印可する入力電極12aと、電気伝導体11の異なる箇所からそれぞれ電気信号を取り出す複数の出力電極13と、電気伝導体11aの異なる箇所からそれぞれ電気信号を取り出す複数の出力電極13aと、各出力電極13及び各出力電極13aにより取り出された電気信号を入力値として、機械学習により、電気伝導体11、11aに力を与えている対象物の識別処理を行う識別処理部14を備えている。以下、詳細に説明する。
【0010】
本実施の形態において、識別装置10は、図1に示すように、ロボット15に具備されている。ロボット15は、2つ(複数の一例)の電気伝導体11、11a、電気伝導体11、11aがそれぞれ固定されたベース体16、16a及び図示しないモータを作動させてベース体16、16aを電気伝導体11、11aと共にそれぞれ移動させて、電気伝導体11、11a間の距離を変える制御手段17を有している。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
他の特許を見る


 特許ウォッチ
特許ウォッチ