TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025012318
公報種別
公開特許公報(A)
公開日
2025-01-24
出願番号
2023115066
出願日
2023-07-13
発明の名称
画像処理装置
出願人
株式会社SUBARU
代理人
弁理士法人つばさ国際特許事務所
主分類
G06T
7/00 20170101AFI20250117BHJP(計算;計数)
要約
【課題】認識精度を高めることができる画像処理装置を提供する。
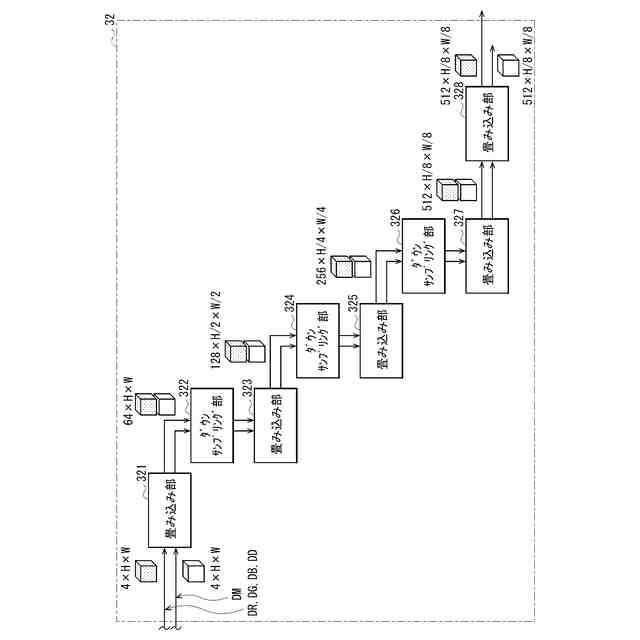
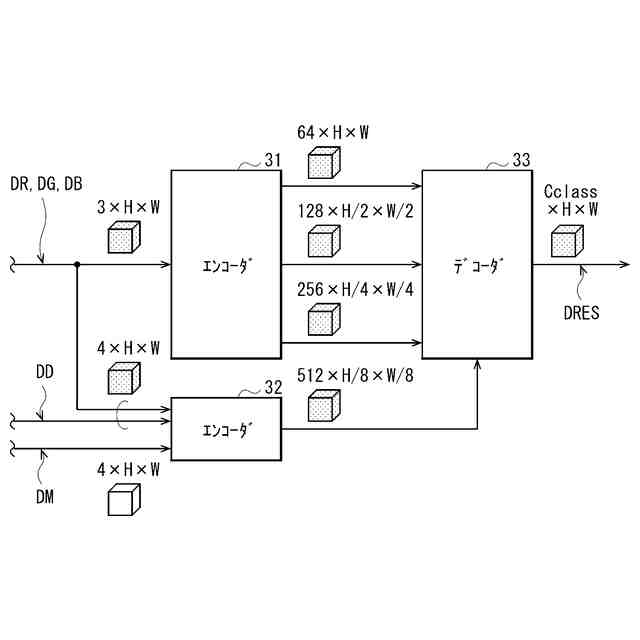
【解決手段】本開示の一実施の形態に係る画像処理装置は、撮像画像データ、および撮像画像データに対応し被写体の深度値についてのマップデータである深度画像データを含む第1の特徴量データと、深度画像データに対応し深度値の有効性についてのマップデータを含む第1の制御データとに基づいて、第1の特徴量データについての第1の畳み込み処理を行うことにより第2の特徴量データを生成可能な第1の畳み込み部を有し、第2の特徴量データに応じた特徴量データを含む複数の特徴量データを生成可能なエンコーダと、複数の特徴量データに基づいて、撮像画像データを生成した撮像装置の周辺の環境の推論結果を生成可能なデコーダとを備える。
【選択図】図7
特許請求の範囲
【請求項1】
撮像画像データ、および前記撮像画像データに対応し被写体の深度値についてのマップデータである深度画像データを含む第1の特徴量データと、前記深度画像データに対応し深度値の有効性についてのマップデータを含む第1の制御データとに基づいて、前記第1の特徴量データについての第1の畳み込み処理を行うことにより第2の特徴量データを生成可能な第1の畳み込み部を有し、前記第2の特徴量データに応じた特徴量データを含む複数の特徴量データを生成可能なエンコーダと、
前記複数の特徴量データに基づいて、前記撮像画像データを生成した撮像装置の周辺の環境の推論結果を生成可能なデコーダと
を備えた画像処理装置。
続きを表示(約 780 文字)
【請求項2】
前記エンコーダは、前記撮像画像データを含む第3の特徴量データに基づいて、前記第3の特徴量データについての第2の畳み込み処理を行うことにより第4の特徴量データを生成可能な第2の畳み込み部をさらに有し、
前記複数の特徴量データは、前記第4の特徴量データに応じた特徴量データを含む
請求項1に記載の画像処理装置。
【請求項3】
前記第1の畳み込み部は、
前記第1の特徴量データおよび前記第1の制御データにおける、互いに対応する座標位置での値を乗算することにより、乗算データを生成可能であり、
前記乗算データに基づいて前記第1の畳み込み処理を行うことにより前記第2の特徴量データを生成可能である
請求項1に記載の画像処理装置。
【請求項4】
前記第1の畳み込み部は、
前記第1の制御データに基づいてルールベースの処理を行うことにより第2の制御データを生成可能であり、
前記第2の特徴量データ、および前記第2の制御データを出力可能である
請求項3に記載の画像処理装置。
【請求項5】
前記第1の畳み込み部は、
前記乗算データに基づいて第3の畳み込み処理を行うことにより第2の制御データを生成可能であり、
前記第2の特徴量データ、および前記第2の制御データを出力可能である
請求項3に記載の画像処理装置。
【請求項6】
前記第1の畳み込み部は、
前記第1の制御データに基づいて、前記第1の制御データについての第4の畳み込み処理を行うことにより第2の制御データを生成可能であり、
前記第2の特徴量データ、および前記第2の制御データを出力可能である
請求項3に記載の画像処理装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、撮像画像に基づいて認識処理を行う画像処理装置に関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
画像処理装置では、撮像画像および深度画像に基づいて、機械学習処理を行うものがある。例えば、特許文献1には、撮像画像に基づいて深度画像を生成するために、機械学習処理を行う技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
特表2023-503827号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、画像処理装置では、撮像画像を生成したカメラの周辺環境を認識するものがある。このような画像処理装置では、周辺環境の認識精度が高いことが望まれている。
【0005】
認識精度を高めることができる画像処理装置を提供することが望ましい。
【課題を解決するための手段】
【0006】
本開示の一実施の形態に係る画像処理装置は、エンコーダと、デコーダとを備えている。エンコーダは、第1の特徴量データと、第1の制御データとに基づいて、第1の特徴量データについての第1の畳み込み処理を行うことにより第2の特徴量データを生成可能な第1の畳み込み部を有し、第2の特徴量データに応じた特徴量データを含む複数の特徴量データを生成可能なものである。第1の特徴量データは、撮像画像データ、および前記撮像画像データに対応し、被写体の深度値についてのマップデータである深度画像データを含む。第1の制御データは、深度画像データに対応し、深度値の有効性についてのマップデータを含む。デコーダは、複数の特徴量データに基づいて、撮像画像データを生成した撮像装置の周辺の環境の推論結果を生成可能なものである。
【発明の効果】
【0007】
本開示の一実施の形態に係る画像処理装置によれば、認識精度を高めることができる。
【図面の簡単な説明】
【0008】
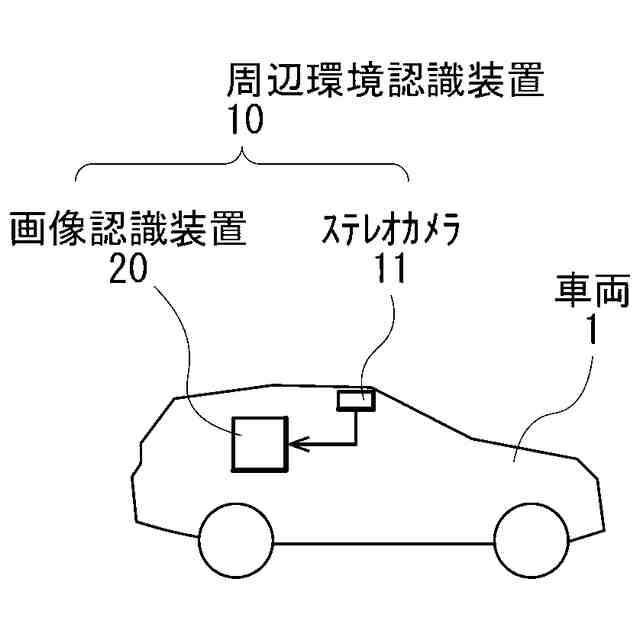
図1は、本開示の一実施の形態に係る周辺環境認識装置の一構成例を表す説明図である。
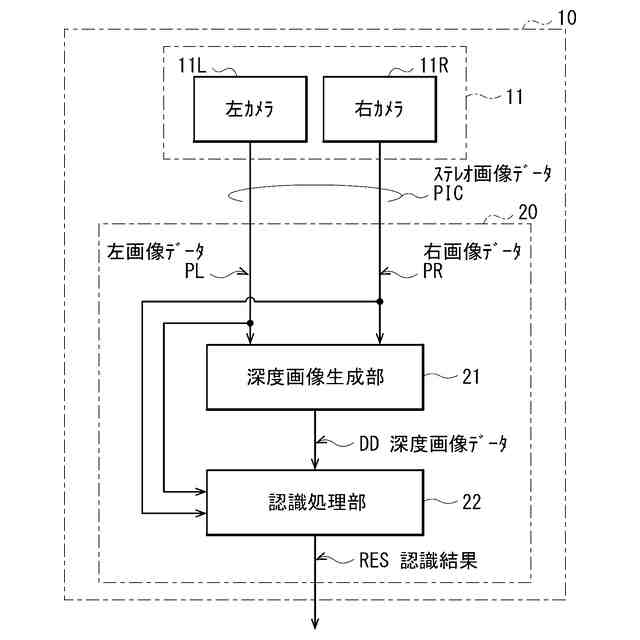
図2は、図1に示した周辺環境認識装置の一構成例を表すブロック図である。
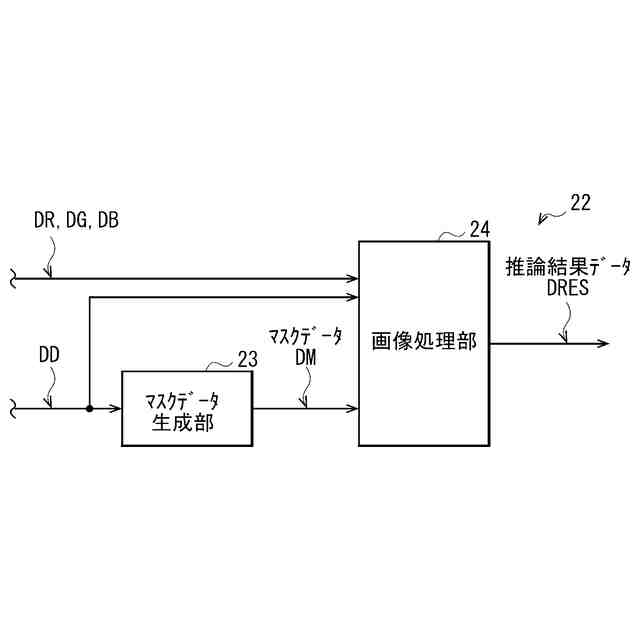
図3は、図2に示した認識処理部の一構成例を表すブロック図である。
図4は、図3に示した認識処理部が用いる機械学習モデルを生成する情報処理装置の一構成例を表すブロック図である。
図5は、図4,5に示した処理部における畳み込みニューラルネットワークの一構成例を表すブロック図である。
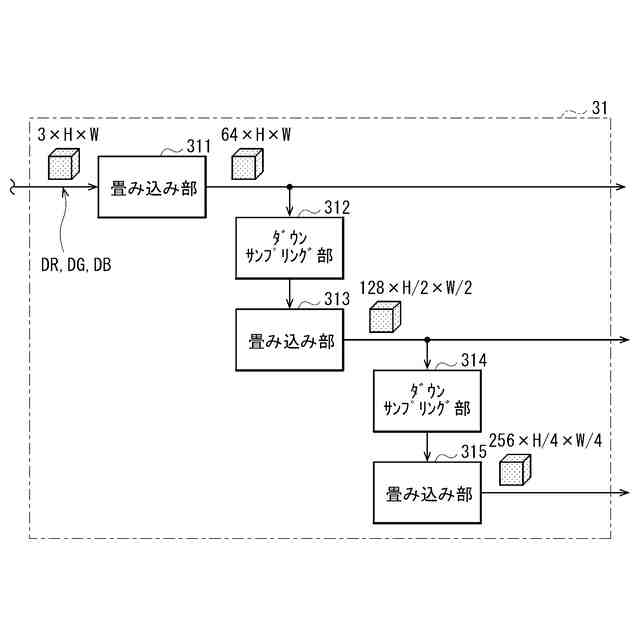
図6は、図5に示した2つのエンコーダのうちの一のエンコーダの一構成例を表すブロック図である。
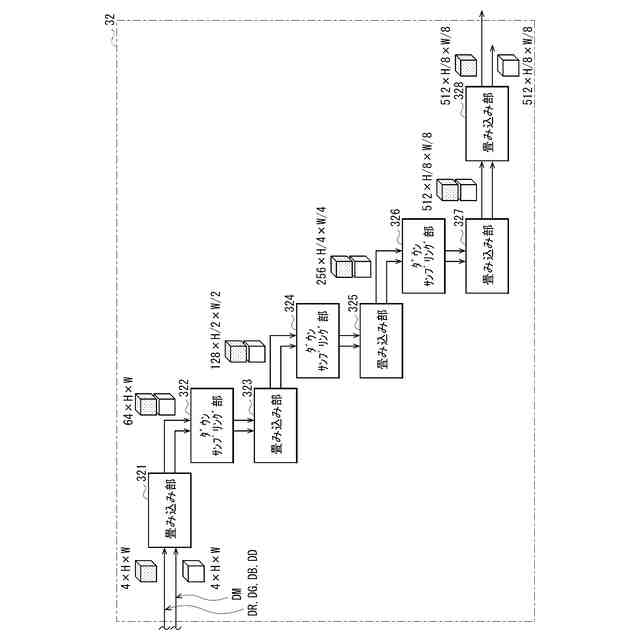
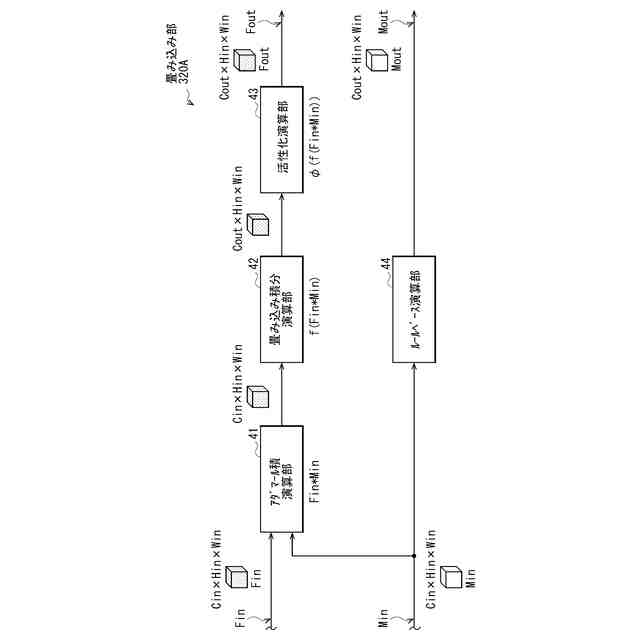
図7は、図5に示した2つのエンコーダのうちの他のエンコーダの一構成例を表すブロック図である。
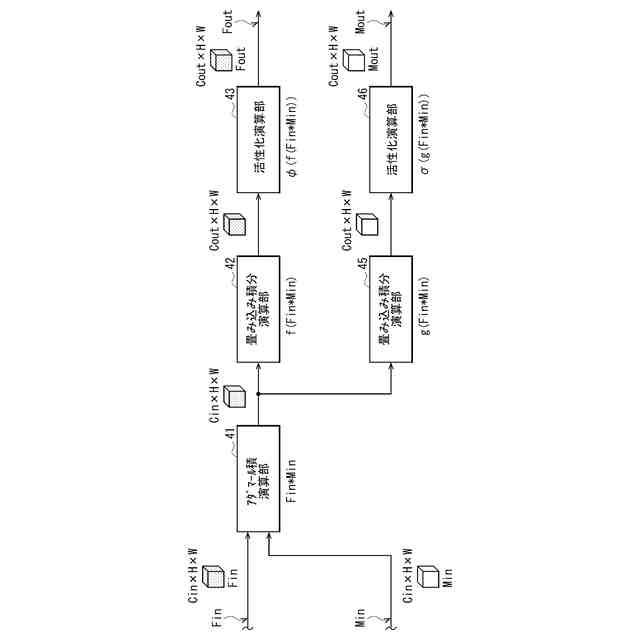
図8Aは、図7に示した畳み込み部の一構成例を表すブロック図である。
図8Bは、図7に示した畳み込み部の他の一構成例を表すブロック図である。
図8Cは、図7に示した畳み込み部の他の一構成例を表すブロック図である。
図9は、図5に示したデコーダの一構成例を表すブロック図である。
図10は、撮像画像の一例を表す説明図である。
図11は、マスクデータにおけるマップデータの一例を表す説明図である。
図12は、教師データに係る推論結果データの一例を表す説明図である。
図13は、機械学習モデルにより生成された推論結果データの一例を表す説明図である。
図14は、参考例に係る畳み込みニューラルネットワークの一構成例を表すブロック図である。
図15は、図14に示したエンコーダの一構成例を表すブロック図である。
図16は、参考例に係る機械学習モデルにより生成された推論結果データの一例を表す説明図である。
図17は、他の参考例に係る畳み込みニューラルネットワークの一構成例を表すブロック図である。
図18は、図17に示したエンコーダの一構成例を表すブロック図である。
図19は、参考例に係る機械学習モデルにより生成された推論結果データの一例を表す説明図である。
図20は、変形例に係る畳み込みニューラルネットワークの一構成例を表すブロック図である。
図21は、図20に示したエンコーダの一構成例を表すブロック図である。
【発明を実施するための形態】
【0009】
以下、本開示の実施の形態について、図面を参照して詳細に説明する。
【0010】
<実施の形態>
[構成例]
図1,2は、一実施の形態に係る画像処理装置を備えた周辺環境認識装置10の一構成例を表すものである。周辺環境認識装置10は、この例では、自動車等の車両1に搭載される。周辺環境認識装置10は、車両1の周辺環境を認識するように構成される。ここで、周辺環境は、移動物体、静止物体、走行にかかわる状態などを含む。移動物体は、車両1の周辺の、他の車両、自転車、歩行者、動物などを含み、静止物体は、車両1の周辺の、建造物、道路標識、路面標識などを含む。走行にかかわる状態は、車両1の周辺の、天候の状態や、路面の濡れや凍結などの状態を含む。周辺環境認識装置10は、ステレオカメラ11と、画像認識装置20とを備えている。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
他の特許を見る
 特許ウォッチ
特許ウォッチ