TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025007813
公報種別
公開特許公報(A)
公開日
2025-01-17
出願番号
2023109451
出願日
2023-07-03
発明の名称
補正値演算方法、補正値演算プログラム、補正値演算装置、およびエンコーダ
出願人
株式会社ミツトヨ
代理人
個人
主分類
G01D
5/244 20060101AFI20250109BHJP(測定;試験)
要約
【課題】2相正弦波状信号の内挿誤差を補正するための補正係数を、簡易な方法で効率よく高精度に算出することができる補正値演算方法、補正値演算プログラム、および補正値演算装置、並びに当該補正値演算装置を備えるエンコーダを提供する。
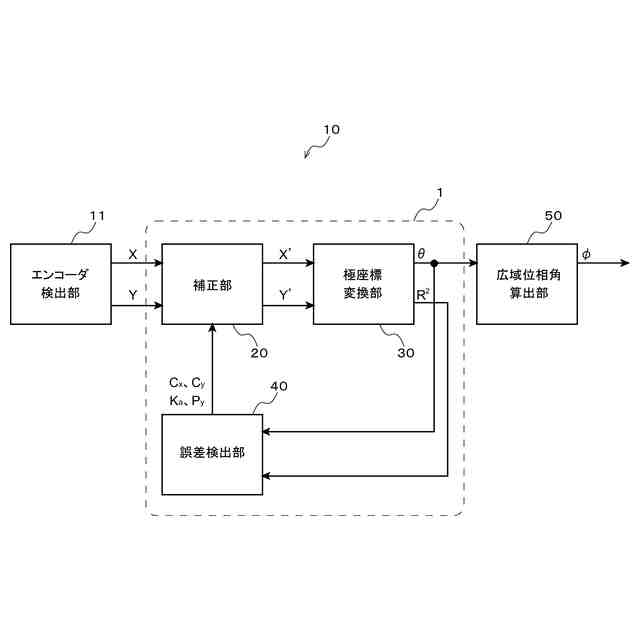
【解決手段】補正値演算方法は、エンコーダが出力する2相正弦波状信号(X、Y)を補正するための補正値を演算する。リサージュ波形におけるN個の位相角と各位相角に対応するリサージュ半径について、各位相角に対応するリサージュ半径の2乗である二乗半径を算出する極座標演算ステップと、算出された各位相角と位相角に対応する二乗半径Rとに基づき、2相正弦波状信号を成す信号Xのオフセット誤差の補正残差および信号Yのオフセット誤差の補正残差、信号Xと信号Yの振幅比誤差の補正残差、信号Xと信号Yの位相差誤差の補正残差を算出し、各補正残差に基づき各補正値を算出する補正値演算ステップと、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
エンコーダが出力する2相正弦波状信号(X、Y)を補正するための補正値を演算する補正値演算方法であって、
前記2相正弦波状信号によって描かれるリサージュ波形におけるN個の位相角θ
i
と各位相角θ
i
に対応するリサージュ半径R
i
について、各位相角θ
i
に対応する前記リサージュ半径R
i
の2乗である二乗半径R
i
2
を算出する極座標演算ステップと、
前記極座標演算ステップにより算出された各位相角θ
i
と当該位相角θ
i
に対応する前記二乗半径R
i
2
とに基づき、少なくとも、前記2相正弦波状信号を成す信号Xのオフセット誤差C
x
の補正残差ΔC
x
および信号Yのオフセット誤差C
y
の補正残差ΔC
y
、信号Xと信号Yの振幅比誤差K
a
の補正残差ΔK
a
、並びに信号Xと信号Yの位相差誤差P
y
の補正残差ΔP
y
を算出し、各補正残差に基づき各補正値を算出する補正値演算ステップと、を備え、
前記補正値演算ステップは、
前記二乗半径R
2
を位相角θを引数に含む三角関数で表した近似式モデルにおける係数を、各位相角θ
i
と各位相角θ
i
に対応する前記二乗半径R
i
2
とを用いて最小二乗法により求め、得られた係数から前記補正残差を求めることを特徴とする補正値演算方法。
続きを表示(約 4,000 文字)
【請求項2】
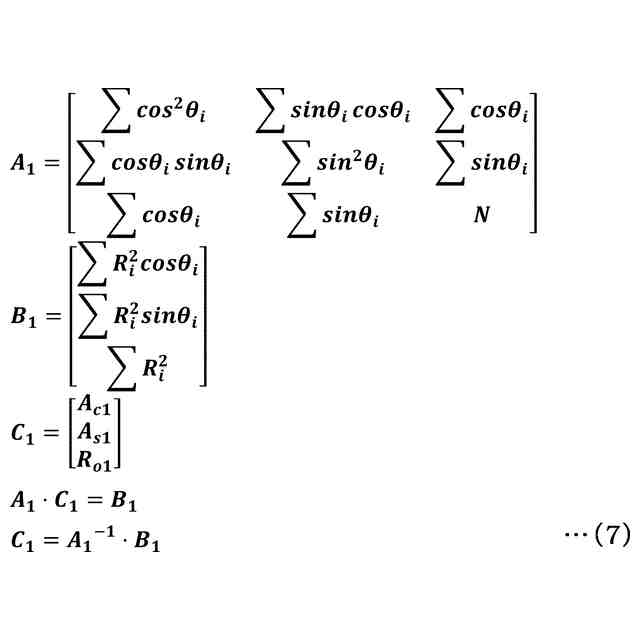
前記補正値演算ステップは、
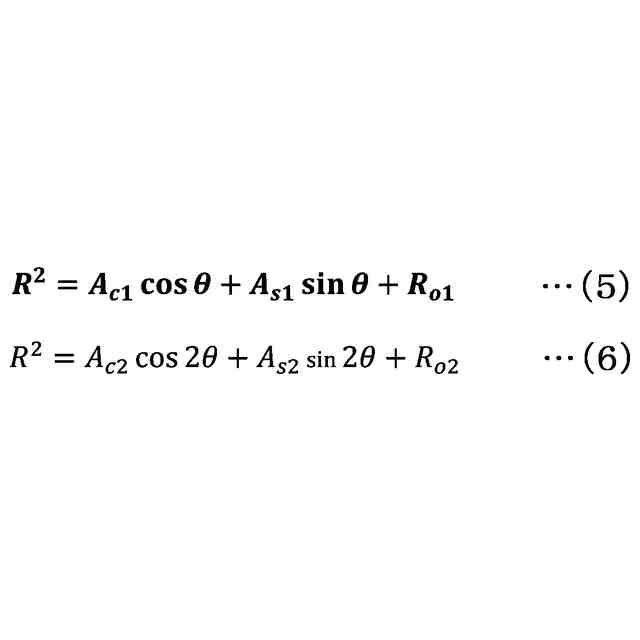
式(5)および式(6)を前記近似式モデルとし、
TIFF
2025007813000027.tif
30
128
当該式(5)における係数A
c1
およびA
s1
を、式(7)によりC
1
行列の要素として求め、
TIFF
2025007813000028.tif
109
169
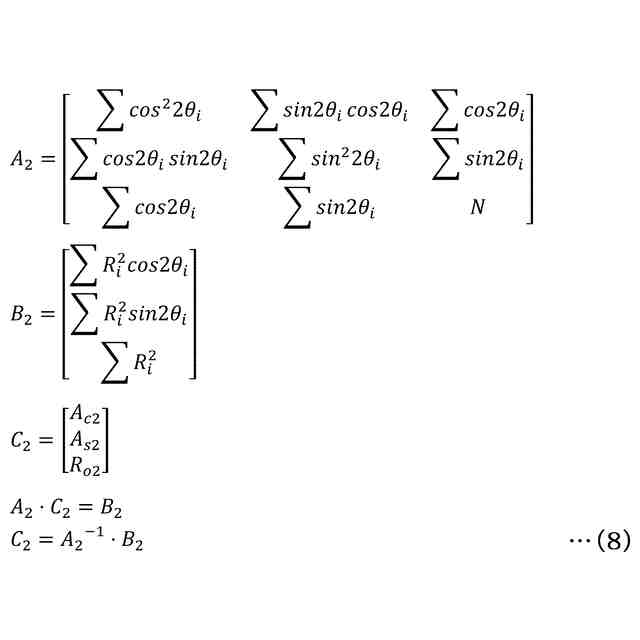
当該式(6)における係数A
c2
およびA
s2
を、式(8)によりC
2
行列の要素として求め、
TIFF
2025007813000029.tif
114
161
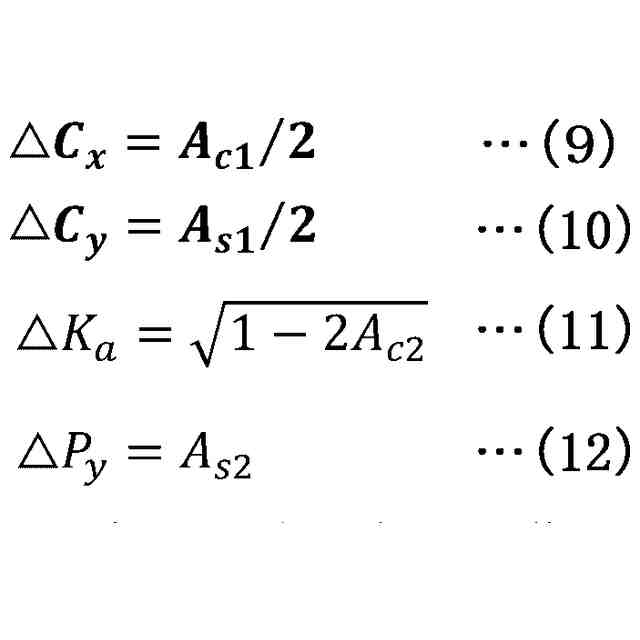
得られた係数A
c1
、A
s1
、A
c2
およびA
s2
から、式(9)~(12)により各補正値を求める
TIFF
2025007813000030.tif
61
97
ことを特徴とする請求項1に記載の補正値演算方法。
【請求項3】
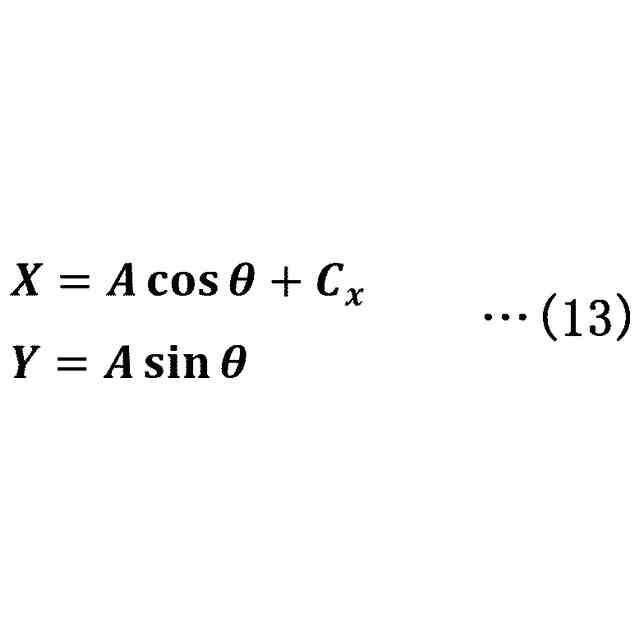
前記極座標演算ステップにおいて、Aを前記2相正弦波状信号の振幅として式(20)によりsinθ
i
とcosθ
i
を近似して得られるx
i
およびy
i
を位相角θ
i
を表すデータとして算出し、
TIFF
2025007813000031.tif
32
124
前記補正値演算ステップは、
式(5)および式(6)を前記近似式モデルとし、
TIFF
2025007813000032.tif
30
128
当該式(5)における係数A
c1
およびA
s1
を、式(21)によりC
1
行列の要素として求め、
TIFF
2025007813000033.tif
107
131
当該式(6)における係数A
c2
およびA
s2
を、式(23)によりC
2
行列の要素として求め、
TIFF
2025007813000034.tif
117
161
得られた係数A
c1
、A
s1
、A
c2
およびA
s2
から、式(9)、(10)、(26)、および(12)により各補正残差を求める
TIFF
2025007813000035.tif
64
127
ことを特徴とする請求項1に記載の補正値演算方法。
【請求項4】
前記補正値に基づいて前記2相正弦波状信号を補正する補正ステップをさらに備え、
前記補正ステップにより補正された2相正弦波状信号に対して前記補正値演算ステップを再度適用して前記補正値を更新することを特徴とする請求項1から3の何れか1項に記載の補正値演算方法。
【請求項5】
各補正値を、式(19)により更新する
TIFF
2025007813000036.tif
68
144
ことを特徴とする請求項4に記載の補正値演算方法。
【請求項6】
前記エンコーダは、2相正弦波状信号の1周期に相当する変位を超える広範囲の変位を検出可能であり、
各位相角θ
i
に対応する前記広範囲の変位を表す広域位相角φ
i
を算出する広域位相角算出ステップと、
前記二乗半径R
2
を広域位相角φの三角関数で表す近似式モデルにおける係数を、前記二乗半径R
i
2
と前記広域位相角φ
i
とを用いて最小二乗法により求め、得られた係数から前記各広域位相角φ
i
に対応する信号強度補正値を求め、当該信号強度補正値に基づき前記各広域位相角φ
i
に対応する前記二乗半径R
i
2
を補正する信号強度補正ステップと、
をさらに備え、
前記補正値演算ステップは、前記信号強度補正ステップによって前記二乗半径R
i
2
が補正された前記二乗半径R
LCi
2
に基づき補正値を算出する、ことを特徴とする請求項1に記載の補正値演算方法。
【請求項7】
前記信号強度補正ステップは、
式(27)を、前記二乗半径R
2
を広域位相角φの三角関数で表す近似式モデルとし、
TIFF
2025007813000037.tif
19
161
当該式(27)における係数a
k
およびb
k
(ただしkは1からN
L
の整数であり、N
L
は近似に用いる際に高次の高調波の次数である)を、式(28)によりR
k
行列の要素として求め、
TIFF
2025007813000038.tif
121
165
得られた係数a
k
およびb
k
から、式(29)により前記各広域位相角φ
i
に対応する信号強度補正値R
Ci
2
を算出し、
TIFF
2025007813000039.tif
29
158
式(30)により、信号強度補正値R
Ci
2
で前記二乗半径R
i
2
を補正して前記各広域位相角φ
i
に対応する補正後の二乗半径R
LCi
2
を算出する
TIFF
2025007813000040.tif
29
110
ことを特徴とする請求項6に記載の補正値演算方法。
【請求項8】
コンピュータに、請求項1から3の何れか1項に記載の補正値演算方法を実行させるプログラム。
【請求項9】
エンコーダが出力する2相正弦波状信号(X、Y)を補正するための補正値を演算する補正値演算装置であって、
前記2相正弦波状信号によって描かれるリサージュ波形におけるN個の位相角θ
i
と各位相角θ
i
に対応するリサージュ半径R
i
について、各位相角θ
i
に対応する前記リサージュ半径R
i
の2乗である二乗半径R
i
2
を算出する極座標変換部と、
前記極座標変換部により算出された各位相角θ
i
と当該位相角θ
i
に対応する前記二乗半径R
i
2
とに基づき、少なくとも、前記2相正弦波状信号を成す信号Xのオフセット誤差C
x
の補正残差ΔC
x
および信号Yのオフセット誤差C
y
の補正残差ΔC
y
、信号Xと信号Yの振幅比誤差K
a
の補正残差ΔK
a
、並びに信号Xと信号Yの位相差誤差P
y
の補正残差ΔP
y
を算出し、各補正残差に基づき各補正値を算出する誤差検出部と、を備え、
前記誤差検出部は、
前記二乗半径R
2
を位相角θを引数に含む三角関数で表した近似式モデルにおける係数を、各位相角θ
i
と各位相角θ
i
に対応する前記二乗半径R
i
2
とを用いて最小二乗法により求め、得られた係数から前記補正残差を求めることを特徴とする補正値演算装置。
【請求項10】
前記誤差検出部は、
式(5)および式(6)を前記近似式モデルとし、
TIFF
2025007813000041.tif
30
128
当該式(5)における係数A
c1
およびA
s1
を、式(7)によりC
1
行列の要素として求め、
TIFF
2025007813000042.tif
109
169
当該式(6)における係数A
c2
およびA
s2
を、式(8)によりC
2
行列の要素として求め、
TIFF
2025007813000043.tif
114
161
得られた係数A
c1
、A
s1
、A
c2
およびA
s2
から、式(9)~(12)により各補正値を求める
TIFF
2025007813000044.tif
61
97
ことを特徴とする請求項9に記載の補正値演算装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、2相正弦波状信号を補正する補正値演算方法、補正値演算プログラム、補正値演算装置、およびエンコーダに関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
従来より、エンコーダが出力する2相正弦波状信号について、オフセット誤差、振幅比誤差、位相差誤差等の誤差を補正する手法が知られている。
【0003】
例えば、特許文献1では、2相正弦波状信号の3次高調波成分を検出し、オフセット誤差、振幅比誤差、位相差誤差を演算し補正する発明が記載されている。特許文献1に記載の発明では、オフセット誤差と振幅比誤差は、2相正弦波信号を用いたリサージュ信号においてX軸またはY軸を横切る4つのゼロクロス点から得るため、補正係数を求める際に用いるデータにゼロクロス点近傍でサンプリングされたデータが含まれていないと、誤差を十分に低減できない。また、位相差誤差は、2相正弦波信号を用いたリサージュ信号がy=x、y=-xの直線と交差する4点から得られるが、誤差を低減するためには直線と交差する点の近傍でサンプリングする必要がある。
【0004】
ここで、電磁誘導式エンコーダは、交流信号を駆動して変位を検出するため、光電式エンコーダに比べサンプリングに時間を要する。また低消費電力のエンコーダでは、サンプリングレートを抑制する場合がある。このようなサンプリングレートが低いエンコーダでは、所望の点(例えばゼロクロス点やy=x、y=-xと交差する点)の近傍でサンプリングできないことがあり、誤差が十分に低減できない恐れがある。
【0005】
また特許文献2では、等ピッチのデータを用いたフーリエ解析による3次高調波成分の検出方法が開示されている。この方法では、リサージュ信号の1回転を均等に分割し、すべての区間をフーリエ解析する。この手法では、サンプリングレートが低いとすべての区間のサンプリングを終えるのに時間を要し、フーリエ解析の更新頻度が低下する。このことから、オフセット誤差、振幅比誤差、位相差誤差の検出に、フーリエ解析の採用は困難であるという問題がある。
【0006】
特許文献3では、2相正弦波状信号XおよびYを、それぞれ別個に正弦波と余弦波の和の式に最小2乗法で近似する方法が開示されている。振幅に係る内挿誤差を低減するには、2相正弦波間の振幅比を1とする必要があるところ、2相正弦波の相対的な関係を配慮せず別個に最小2乗法で近似する特許文献3の方法では、振幅比に係る内挿誤差の検出効率が低いという問題がある。
【先行技術文献】
【特許文献】
【0007】
特開2006-112862号公報
特開2006-112859号公報
特開2007-327770号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
このような状況に鑑み、本発明は、2相正弦波状信号の内挿誤差を補正するための補正係数を、簡易な方法で効率よく高精度に算出することができる補正値演算方法、補正値演算プログラム、および補正値演算装置、並びに当該補正値演算装置を備えるエンコーダを提供することを目的とする。
【課題を解決するための手段】
【0009】
上記の課題を解決すべく、本発明の実施形態に係る補正値演算方法は、エンコーダが出力する2相正弦波状信号(X、Y)を補正するための補正値を演算する。当該補正値演算方法は、2相正弦波状信号によって描かれるリサージュ波形におけるN個の位相角θ
i
と各位相角θ
i
に対応するリサージュ半径R
i
について、各位相角θ
i
に対応するリサージュ半径R
i
の2乗である二乗半径R
i
2
を算出する極座標演算ステップと、極座標演算ステップにより算出された各位相角θ
i
と当該位相角θ
i
に対応する二乗半径R
i
2
とに基づき、少なくとも、2相正弦波状信号を成す信号Xのオフセット誤差C
x
の補正残差ΔC
x
および信号Yのオフセット誤差C
y
の補正残差ΔC
y
、信号Xと信号Yの振幅比誤差K
a
の補正残差ΔK
a
、並びに信号Xと信号Yの位相差誤差P
y
の補正残差ΔP
y
を算出し、各補正残差に基づき各補正値を算出する補正値演算ステップと、を備える。そして、補正値演算ステップにおいて、二乗半径R
2
を位相角θを引数に含む三角関数で表した近似式モデルにおける係数を、各位相角θ
i
と各位相角θ
i
に対応する二乗半径R
i
2
とを用いて最小二乗法により求め、得られた係数から補正残差を求めることを特徴とする。
【0010】
また、本発明の実施形態に係るプログラムは、コンピュータに、上記の補正値演算方法を実行させる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
他の特許を見る

 特許ウォッチ
特許ウォッチ