TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025007154
公報種別
公開特許公報(A)
公開日
2025-01-17
出願番号
2023108362
出願日
2023-06-30
発明の名称
車両の走行制御装置
出願人
スズキ株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
,
個人
主分類
B60W
30/02 20120101AFI20250109BHJP(車両一般)
要約
【課題】自動運転走行によってカーブ区間を走行する場合に搭乗者の不安感を抑制できる車両の走行制御装置を提供する。
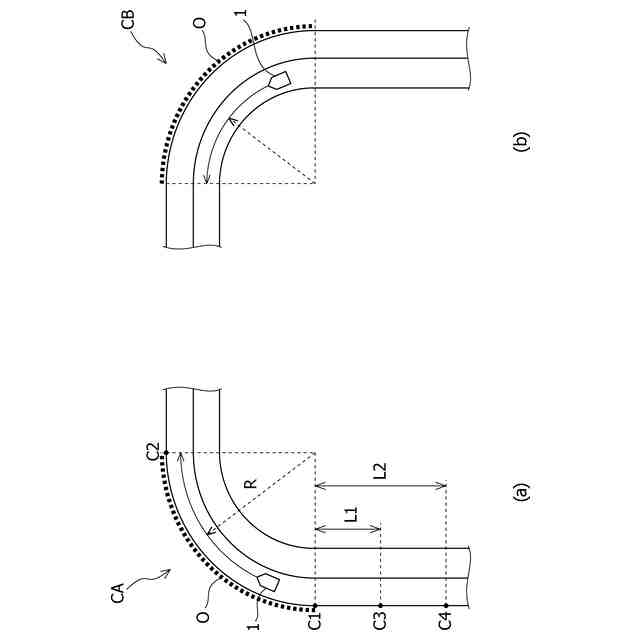
【解決手段】自動運転走行を実行可能な車両の走行制御装置は、車両の状態および周囲環境に関する情報を取得し、自動運転走行時の走行経路を生成し、走行経路に従って車両が自動運転走行する際に車両の横加速度が所定値以下となるように目標速度V1を算出し、環境状態に基づいてカーブ区間を検出し、走行経路にカーブ区間が存在する場合、車両の走行車線がカーブ内側となる内カーブ区間における目標速度を第1車速よりも小さい第2車速V2に設定し、車両の走行車線がカーブ外側となる外カーブ区間における目標速度を第2車速V2よりも小さい第3車速V3に設定する。
【選択図】図3
特許請求の範囲
【請求項1】
自動運転走行を実行可能な車両の走行制御装置であって、
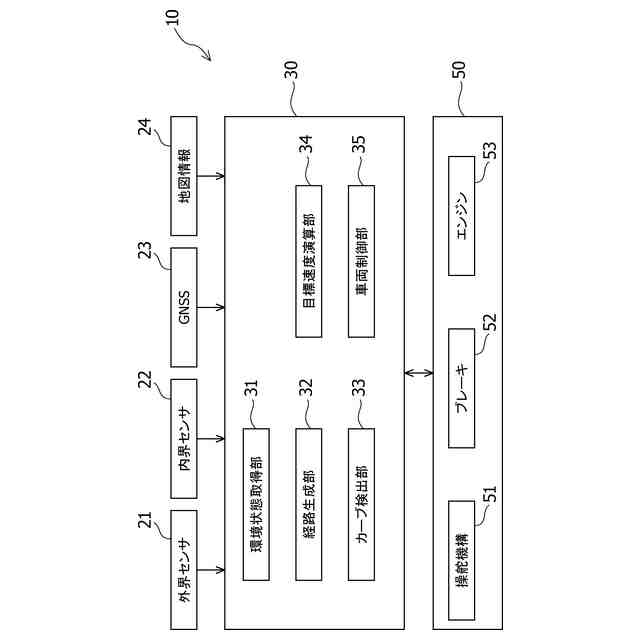
前記車両の車両状態および周囲環境に関する情報を取得する環境状態取得部と、
前記環境状態取得部によって取得される情報に基づいて、自動運転走行時の走行経路を生成する経路生成部と、
前記環境状態取得部によって取得される情報に基づいて、前記走行経路上に存在するカーブ区間を検出するカーブ検出部と、
前記経路生成部によって生成された前記走行経路に従って前記車両が自動運転走行する際の目標速度を演算する目標速度演算部と、
前記目標速度で前記走行経路に沿って走行するように前記車両の速度制御を行う車両制御部と
を備え、
前記目標速度演算部は、前記走行経路に従って前記車両が自動運転走行する際に、前記車両の横加速度が所定値以下となるように、前記目標速度として第1車速を算出し、
前記目標速度演算部は、前記走行経路にカーブ区間が存在する場合、
前記車両の走行車線がカーブ内側となる内カーブ区間における前記目標速度を、前記第1車速よりも小さい第2車速に設定し、
前記車両の走行車線がカーブ外側となる外カーブ区間における前記目標速度を、前記第2車速よりも小さい第3車速に設定する、車両の走行制御装置。
続きを表示(約 1,200 文字)
【請求項2】
前記環境状態取得部によって取得される情報に基づいて、前記外カーブ区間に沿って道路外側に存在する障害物を検出する障害物検出部をさらに備え、
前記障害物検出部によって、前記外カーブ区間に沿って存在する前記障害物が検出された場合、前記目標速度演算部は、前記外カーブ区間における前記目標速度を、前記第3車速よりも小さい第4車速に設定する、請求項1に記載の車両の走行制御装置。
【請求項3】
前記カーブ検出部によって、前記外カーブ区間が下り勾配に存在すると検出された場合、前記目標速度演算部は、前記外カーブ区間における前記目標速度を、前記第4車速よりも小さい第5車速に設定する、請求項2に記載の車両の走行制御装置。
【請求項4】
前記車両制御部は、前記カーブ区間のカーブ開始位置よりも手前に設定された減速開始位置から、前記カーブ区間における前記目標速度まで減速するための減速制御を開始するように構成され、
前記車両制御部は、前記外カーブ区間のカーブ開始位置から前記減速開始位置までの距離が、前記内カーブ区間のカーブ開始位置から前記減速開始位置までの距離よりも長くなるように、前記外カーブ区間に進入する場合の前記減速開始位置を変更する、請求項1から3のいずれか一項に記載の車両の走行制御装置。
【請求項5】
前記走行経路上に存在する前記外カーブ区間が複数の車線を有する場合は、前記車両の走行車線が前記複数の車線のうちの最もカーブ外側の車線である場合にのみ、前記目標速度演算部は、前記目標速度を前記第3車速に設定し、前記車速制御部は、前記減速開始位置の変更を行う、請求項4に記載の車両の走行制御装置。
【請求項6】
前記カーブ検出部は、地図情報データベースから得られる高精度3次元地図情報に基づいて、前記自動運転走行の開始前に、前記走行経路上に存在する前記カーブ区間を検出し、
前記障害物検出部は、前記高精度3次元地図情報に基づいて、前記自動運転走行の開始前に前記障害物を検出する、請求項2に記載の車両の走行制御装置。
【請求項7】
前記目標速度演算部は、
前記第1車速に第1係数を乗算することにより、前記第2車速を算出し、
前記第1車速に、前記第1係数よりも小さい第2係数を乗算することにより前記第3車速を算出する、請求項1に記載の車両の走行制御装置。
【請求項8】
前記目標速度演算部は、
前記車両が前記内カーブ区間を走行する際に、前記車両の横加速度が前記所定値よりも小さい第1制限値以下となるように、前記内カーブ区間の曲率に応じて前記第2車速を算出し、
前記車両が前記外カーブ区間を走行する際に、前記車両の横加速度が前記第1制限値よりも小さい第2制限値以下となるように、前記外カーブ区間の曲率に応じて前記第3車速を算出する、請求項1に記載の車両の走行制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、自動運転走行を実行可能な車両の走行制御装置に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
自動運行装置の制御によって自動運転走行を行う車両の開発が進められている。SAE(Society of Automotive Engineers)レベル3~5相当の自動運転走行が行われる車両においては、自動運行装置が主体となって自動運転レベルに応じた車両制御を行う。したがって、カーブ区間を走行する場合であっても、ドライバは基本的に運転操作を行う必要がない。自動運転走行によってカーブ区間を走行する場合は、直線路と同様の速度で走行するように車両の速度制御を行うケース、または直線路とは異なる速度でカーブ区間を走行するように速度制御を行うケースが考えられる。
【0003】
自動運転車両のカーブ区間における速度制御として、例えば特許文献1には、前方車両との車間距離やカーブ路の旋回半径等を考慮して、カーブ路を旋回走行するための目標車速を設定し、目標車速を実現するための目標加速度を設定する車両制御装置が開示されている。特許文献1の装置は、旋回走行開始から終了まで、ほぼ一定の加速度で旋回走行することにより、乗員の車酔いを抑制するようにしている。
【先行技術文献】
【特許文献】
【0004】
特開2020-066383号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上述したように、レベル3~5相当の自動運転走行が行われる車両においては、車両の自動運行装置が主体となって車両制御を行うため、ドライバは、基本的に自動運転中に運転操作を行う必要がなく、運転席に座っていたとしても、ドライバではなくパッセンジャとして乗車していることになる。自動運転走行中に乗車している搭乗者は、自動運転中の車両の挙動が、自らが運転操作を行う場合の挙動と異なる場合、違和感や不安感を抱く傾向にある。とくに、車両がカーブ区間を走行する場合、搭乗者は、自動運行装置によって車両制御が適切に行われているか不安感を抱きやすく、この不安感は、カーブ区間の周囲環境によって増大することがある。
【0006】
本発明は、上記のような実状に鑑みてなされたものであり、その目的は、自動運転走行によってカーブ区間を走行する場合に、搭乗者の不安感を抑制することができる車両の走行制御装置を提供することにある。
【課題を解決するための手段】
【0007】
本発明の一態様によれば、自動運転走行を実行可能な車両の走行制御装置は、前記車両の車両状態および周囲環境に関する情報を取得する環境状態取得部と、前記環境状態取得部によって取得される情報に基づいて、自動運転走行時の走行経路を生成する経路生成部と、前記環境状態取得部によって取得される情報に基づいて、前記走行経路上に存在するカーブ区間を検出するカーブ検出部と、前記経路生成部によって生成された前記走行経路に従って前記車両が自動運転走行する際の目標速度を演算する目標速度演算部と、前記目標速度で前記走行経路に沿って走行するように前記車両の速度制御を行う車両制御部とを備え、前記目標速度演算部は、前記走行経路に従って前記車両が自動運転走行する際に、前記車両の横加速度が所定値以下となるように、前記目標速度として第1車速を算出し、前記目標速度演算部は、前記走行経路にカーブ区間が存在する場合、前記車両の走行車線がカーブ内側となる内カーブ区間における前記目標速度を、前記第1車速よりも小さい第2車速に設定し、前記車両の走行車線がカーブ外側となる外カーブ区間における前記目標速度を、前記第2車速よりも小さい第3車速に設定する。
【発明の効果】
【0008】
本発明に係る車両の走行制御装置は、自動運転走行によってカーブ区間を走行する場合に、搭乗者の不安感を抑制することができる。
【図面の簡単な説明】
【0009】
図1は、本発明の第1の実施の形態における車両の走行制御装置の概略構成を示すブロック図である。
図2(a),(b)は、カーブ区間を模式的に示す図である。
図3は、第1の実施の形態における速度制御の流れを説明するフローチャートである。
図4は、本発明の第2の実施の形態における車両の走行制御装置の概略構成を示すブロック図である。
図5(a),(b)は、ガードレールが存在するカーブ区間を模式的に示す図である。
図6は、第2の実施の形態における速度制御の流れを説明するフローチャートである。
【発明を実施するための形態】
【0010】
-第1の実施の形態-
以下、本発明の第1の実施の形態に係る車両の走行制御装置について、図面を参照しながら詳細に説明する。本実施の形態による車両の走行制御装置は、レーダおよびカメラ等の外界センサを用いて自車両位置および自車両の周囲環境を認識し、車速と操舵を制御することによって自動運転走行を実行可能に構成されている。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
他の特許を見る





 特許ウォッチ
特許ウォッチ