TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025004670
公報種別
公開特許公報(A)
公開日
2025-01-15
出願番号
2023104508
出願日
2023-06-26
発明の名称
管内走行装置、管内走行装置の制御方法、及び管内走行装置の制御プログラム
出願人
日鉄パイプライン&エンジニアリング株式会社
,
学校法人立命館
代理人
個人
,
個人
,
個人
,
個人
,
個人
,
個人
,
個人
,
個人
主分類
G02B
23/24 20060101AFI20250107BHJP(光学)
要約
【課題】面外曲げの管路を走行可能な管内走行装置、管内走行装置の制御方法、及び管内走行装置の制御プログラムを提供する。
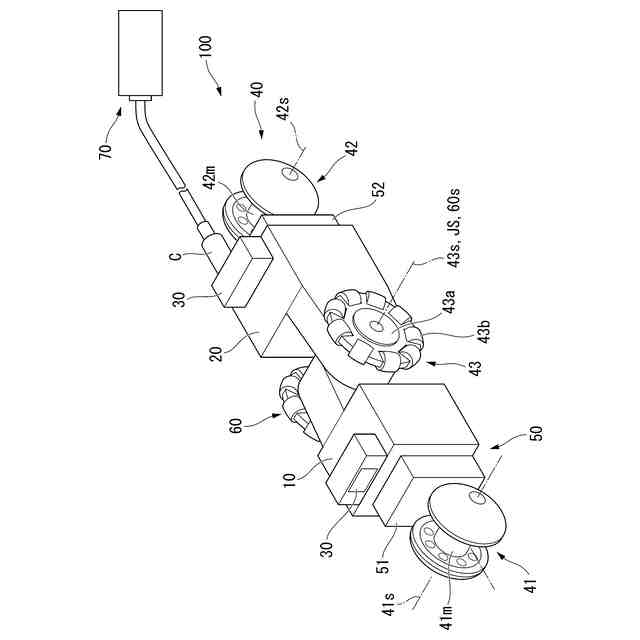
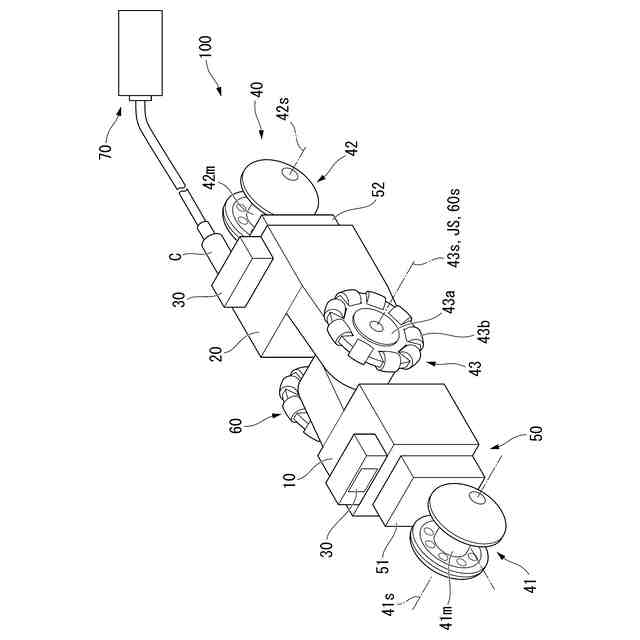
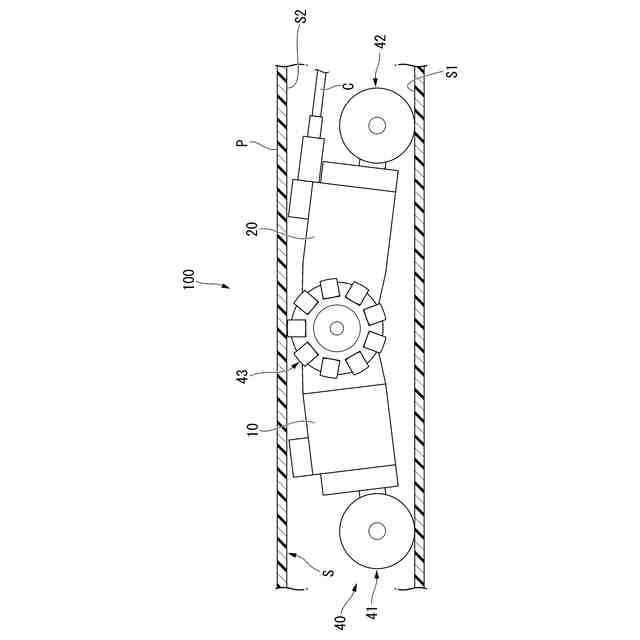
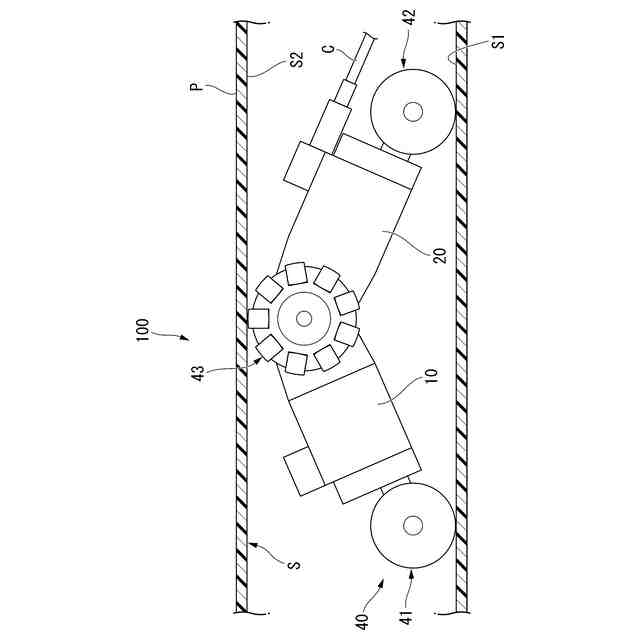
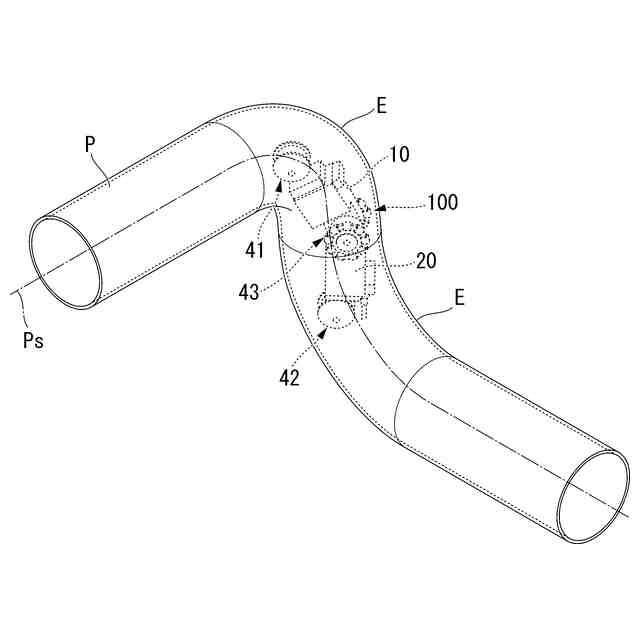
【解決手段】第1リンク10と、第1リンク10に連結される第2リンク20と、第1リンク10と第2リンク20とを連結する能動関節部60と、管内走行装置100を移動可能とするように回転する第1球状車輪41、第2球状車輪42、及び中央車輪43と、を備え、第1球状車輪41は、第1球状車輪41の回転軸41sについて、管路Pの管軸Psまわりの角度を制御可能であり、第2球状車輪42は、第2球状車輪42の回転軸42sについて、管路Pの管軸Psまわりの角度を制御可能であり、中央車輪43は、中央車輪43の回転軸43sに沿って、受動的に移動可能であることを特徴とする。
【選択図】図1
特許請求の範囲
【請求項1】
管路の内部を走行する管内走行装置であって、
前記管内走行装置の一方の側に設けられる第1リンクと、
前記管内走行装置の他方の側に設けられ、前記第1リンクに連結される第2リンクと、
前記第1リンクと前記第2リンクとを揺動可能に連結し、かつ、前記第1リンクと前記第2リンクとの角度を能動的に変更可能な能動関節部と、
前記管内走行装置を前記一方の側及び前記他方の側に移動可能とするように回転する車輪と、
を備え、
前記車輪は、
前記第1リンクの前記一方の側の端部に設けられ、回転軸まわりに回転可能な第1球状車輪と、
前記第2リンクの前記他方の側の端部に設けられ、回転軸まわりに回転可能な第2球状車輪と、
回転軸が前記能動関節部の回転軸に沿うように設けられる中央車輪と、
を含み、
前記能動関節部が、前記第1リンクおよび前記第2リンクとの角度を調整した状態で、
前記第1球状車輪および前記第2球状車輪は、前記管路の内壁面のうちの第1内壁面に接し、前記中央車輪は、前記管路の内壁面のうち、前記管路の管軸を間に挟んで、前記第1内壁面と径方向に対向する第2内壁面に接し、
前記第1球状車輪は、前記第1球状車輪の回転軸について、前記管路の管軸まわりの角度を制御可能であり、
前記第2球状車輪は、前記第2球状車輪の回転軸について、前記管路の管軸まわりの角度を制御可能であり、
前記中央車輪は、前記中央車輪の回転軸に沿って、受動的に移動可能である、
ことを特徴とする管内走行装置。
続きを表示(約 660 文字)
【請求項2】
前記能動関節部はトルク制御が可能である、
ことを特徴とする請求項1に記載の管内走行装置。
【請求項3】
前記能動関節部には、低摩擦ギアードモータが用いられる、
ことを特徴とする請求項1に記載の管内走行装置。
【請求項4】
前記第1球状車輪及び前記第2球状車輪の前記管軸まわりの角度を検出するエンコーダを更に備える、
ことを特徴とする請求項1に記載の管内走行装置。
【請求項5】
前記車輪の回転速度と、前記第1球状車輪及び前記第2球状車輪の前記管軸まわりの角度と、前記能動関節部のトルクと、を操作可能な操作部を更に備える、
ことを特徴とする請求項1に記載の管内走行装置。
【請求項6】
請求項1に記載の管内走行装置の制御方法であって、
前記管路の屈曲部に進入する時、前記第1球状車輪及び前記第2球状車輪のそれぞれを、前記第1リンク及び前記第2リンクに対して、前記管路の管軸まわりに回転しないように制御する、
ことを特徴とする管内走行装置の制御方法。
【請求項7】
前記能動関節部のトルクを一定に制御する、
ことを特徴とする請求項6に記載の管内走行装置の制御方法。
【請求項8】
請求項1から5のいずれか1項に記載の管内走行装置を作動させるための制御手段としてコンピュータを機能させることを特徴とする、
管内走行装置の制御プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、管内走行装置、管内走行装置の制御方法、及び管内走行装置の制御プログラムに関する。
続きを表示(約 3,000 文字)
【背景技術】
【0002】
ガス管をはじめとする管路の内部を点検する点検装置として、カメラを備える管内走行装置を用いることがある。
例えば、特許文献1には、複雑な制御を不要とし、かつ、小型化を図ることを目的とした管内走行装置が開示されている。特許文献1の管内走行装置は、複数のリンクを連結部によって揺動可能に連結し、転動体によって管路の内部を走行可能にしつつ、付勢手段によって転動体を管の内壁面に当接させる。特許文献1の管内走行装置における転動体は、管内走行装置が進行方向に進む方向の回転と、管内走行装置が管軸まわりにロール回転する方向の回転と、が、1つのアクチュエータによって制御される。
【先行技術文献】
【特許文献】
【0003】
特開2022-26760号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
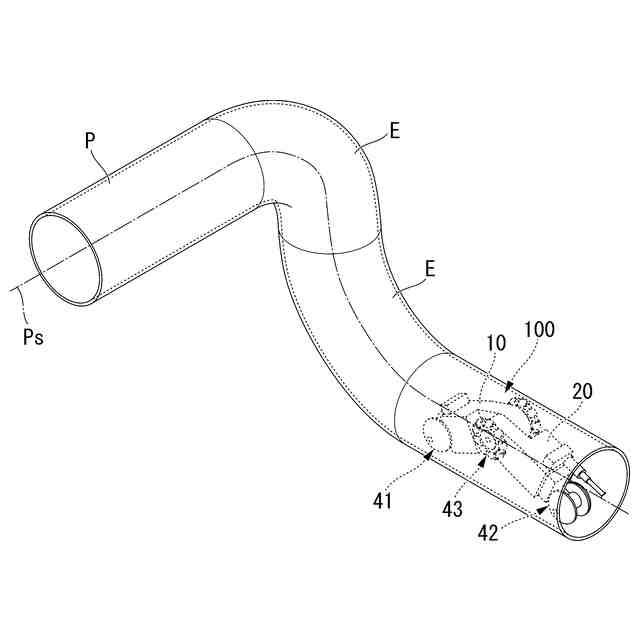
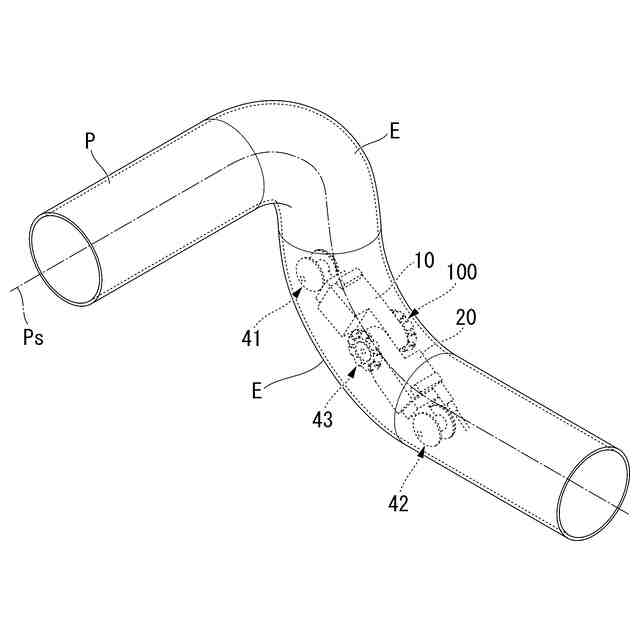
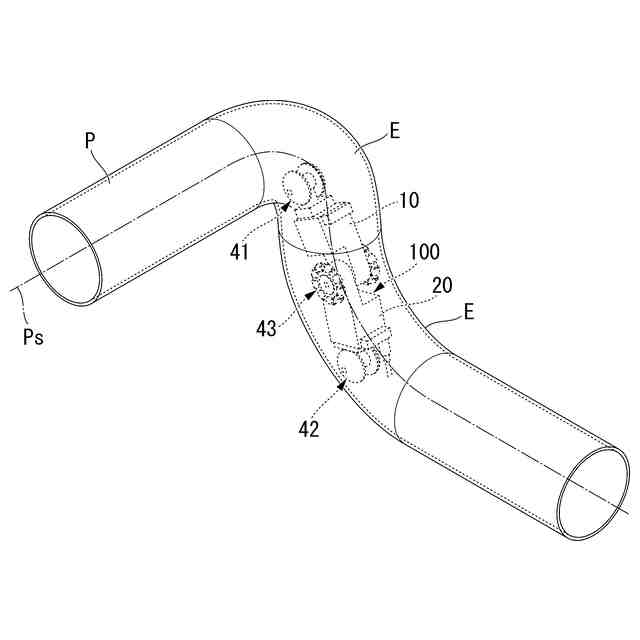
管内走行装置が走行する管路には、エルボ等によって屈曲部が形成されたものがある。すなわち、管軸が曲線状となっているものがある。また、複数のエルボが連続して設けられ、かつ、前記複数のエルボにおいて、曲線状の管軸が含まれる平面が互いに異なっている(面外曲げ)ものがある。
特許文献1の管内走行装置において、リンクが3つ以上設けられた場合、前述の面外曲げの管路を走行することが幾何条件的に不可能となる。また、リンクが2つの場合、面外曲げの管路を走行する際には、面外曲げの管路内を走行中に、管内走行装置が管軸まわりにロール回転する必要がある。しかしながら、特許文献1の管内走行装置では、面外曲げの管路を走行しようとすると、転動体が管内走行装置のリンクに対して回転してしまい、管路内を進めなくなる課題がある。
【0005】
本発明は、前述した事情に鑑みてなされたものであって、面外曲げの管路を走行可能な管内走行装置、管内走行装置の制御方法、及び管内走行装置の制御プログラムを提供することを目的とする。
【課題を解決するための手段】
【0006】
<1>本発明の態様1に係る管内走行装置は、管路の内部を走行する管内走行装置であって、前記管内走行装置の一方の側に設けられる第1リンクと、前記管内走行装置の他方の側に設けられ、前記第1リンクに連結される第2リンクと、前記第1リンクと前記第2リンクとを揺動可能に連結し、かつ、前記第1リンクと前記第2リンクとの角度を能動的に変更可能な能動関節部と、前記管内走行装置を前記一方の側及び前記他方の側に移動可能とするように回転する車輪と、を備え、前記車輪は、前記第1リンクの前記一方の側の端部に設けられ、回転軸まわりに回転可能な第1球状車輪と、前記第2リンクの前記他方の側の端部に設けられ、回転軸まわりに回転可能な第2球状車輪と、回転軸が前記能動関節部の回転軸に沿うように設けられる中央車輪と、を含み、前記能動関節部が、前記第1リンクおよび前記第2リンクとの角度を調整した状態で、前記第1球状車輪および前記第2球状車輪は、前記管路の内壁面のうちの第1内壁面に接し、前記中央車輪は、前記管路の内壁面のうち、前記管路の管軸を間に挟んで、前記第1内壁面と径方向に対向する第2内壁面に接し、前記第1球状車輪は、前記第1球状車輪の回転軸について、前記管路の管軸まわりの角度を制御可能であり、前記第2球状車輪は、前記第2球状車輪の回転軸について、前記管路の管軸まわりの角度を制御可能であり、前記中央車輪は、前記中央車輪の回転軸に沿って、受動的に移動可能であることを特徴とする。
【0007】
態様1によれば、第1球状車輪は、第1球状車輪の回転軸について、管路の管軸まわりの角度を制御可能であり、第2球状車輪は、第2球状車輪の回転軸について、管路の管軸まわりの角度を制御可能である。そして、中央車輪は、中央車輪の回転軸に沿って、受動的に移動可能である。すなわち、中央車輪は、管内走行装置を一方の側及び他方の側に移動可能とするように回転することに加えて、外からの力によって受動的に、管路の内壁面を周方向に滑るように移動可能である。
これらによって、例えば、管内走行装置が面内曲げの管路から管内走行装置が面外曲げの管路に進入し、第1球状車輪が管路の内壁面に接することで管軸まわりに回転する方向の力を受けた時、以下のように制御可能である。すなわち、第1球状車輪及び第2球状車輪が、それぞれの回転軸を、管内走行装置のリンクに対して管軸まわりに回転しないように制御する(回転軸を管軸に対して交差する方向に制御する)ことで、例えば、第1球状車輪のみなど、管内走行装置の一部が部分的に管軸まわりに回転するといったこと等が無く、管内走行装置の全体が管軸まわりに回転する。このことで、面外曲げの管路内で、管内走行装置を管軸まわりにロール回転させることができる。よって、特殊な操作等をすることなく、また、事前に管路の幾何学情報を調査することなく、面外曲げの管路を走行可能な管内走行装置とすることができる。
また、例えば、第1球状車輪及び第2球状車輪のそれぞれの回転軸を、管内走行装置のリンクに対して管軸まわりに回転するように制御することで、管内走行装置を、一方の側又は他方の側に移動させることなく、その場で管軸まわりにロール回転させることができる。このことで、例えば、管内走行装置が曲線状の管路に進入する前に、管内走行装置の管軸まわりの角度を最適に調整することができる。よって、より管路の内部を走行しやすくすることができる。
また、リンクが2つのみであることで、リンクが3つ以上設けられる場合と比較して、小型且つ軽量な管内走行装置とすることができる。
【0008】
<2>本発明の態様2に係る管内走行装置は、態様1に係る管内走行装置において、前記能動関節部はトルク制御が可能であることを特徴とする。
【0009】
ここで、管内走行装置において、複数の内径の管路に対応可能としたい旨の要望がある。この時、管路の内径を問わず、車輪が管路の内壁面に押し付けられる力を十分なものとする必要がある。すなわち、例えば、車輪が管路の内壁面に押し付けられる力が小さいと、管内走行装置が管路を走行する際に必要な摩擦力が十分に得られなくなり、管内走行装置が管路を走行できなくなる。
そこで、態様2によれば、第1リンクと第2リンクとの角度を能動的に変更可能な能動関節部は、トルク制御が可能である。このことで、能動関節部が、第1リンクと第2リンクとの角度を変更して車輪を管路の内壁面に当接させる際のトルクを制御することで、管路の内壁面に車輪を押し付ける力を、管路の内径を問わず十分なものにすることができる。よって、例えば、管路の内径が大きい場合に、車輪と管路の内壁面との間の摩擦力を十分にすることで、管内走行装置が管路を走行できなくなることを抑えることができる。
【0010】
<3>本発明の態様3に係る管内走行装置は、態様1又は態様2に係る管内走行装置において、前記能動関節部には、低摩擦ギアードモータが用いられることを特徴とする。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
他の特許を見る

 特許ウォッチ
特許ウォッチ