TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025001283
公報種別
公開特許公報(A)
公開日
2025-01-08
出願番号
2023100784
出願日
2023-06-20
発明の名称
パターン形状計測方法、パターン形状計測装置、および半導体装置の製造方法
出願人
キオクシア株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
G01B
15/00 20060101AFI20241225BHJP(測定;試験)
要約
【課題】パターンの形状を高精度で計測すること。
【解決手段】実施形態のパターン形状計測方法は、計測対象であるパターンの形状データに基づいて、パターンの輪郭点の位置情報を含む輪郭点データを生成し、輪郭点データから2以上の連続する輪郭点の位置情報を選択して、連続する輪郭点の位置情報からなる複数の抽出点データを生成し、複数の前記抽出点データのそれぞれにおいて、連続する輪郭点に基づく指標線と、パターンの所定方向に沿って延びる基準線と、がなす角度を算出し、角度の出現頻度に基づいて、パターンに対する荷電粒子の走査角度を決定し、決定した走査角度において、パターンを走査することを含む。
【選択図】図1
特許請求の範囲
【請求項1】
計測対象であるパターンの形状データに基づいて、前記パターンの輪郭点の位置情報を含む輪郭点データを生成し、
前記輪郭点データから2以上の連続する輪郭点の位置情報を選択して、前記連続する輪郭点の位置情報からなる複数の抽出点データを生成し、
複数の前記抽出点データのそれぞれにおいて、前記連続する輪郭点に基づく指標線と、前記パターンの所定方向に沿って延びる基準線と、がなす角度を算出し、
前記角度の出現頻度に基づいて、前記パターンに対する荷電粒子の走査角度を決定し、
前記走査角度において、前記パターンを走査することを含む、
パターン形状計測方法。
続きを表示(約 1,500 文字)
【請求項2】
前記角度の出現頻度に基づいて、前記荷電粒子の走査角度を決定することは、
複数の前記角度のうち、前記出現頻度が最も低い前記角度を、前記荷電粒子の前記走査角度として決定することを含む、
請求項1に記載のパターン形状計測方法。
【請求項3】
前記輪郭点データから2以上の連続する輪郭点の位置情報を選択することは、
前記輪郭点データのうち、予め定められた領域に含まれる前記輪郭点から2以上の連続する輪郭点の位置情報を選択することを含む、
請求項1に記載のパターン形状計測方法。
【請求項4】
前記角度の出現頻度に基づいて、前記荷電粒子の走査角度を決定することは、
前記抽出点データのうち少なくとも1つの輪郭点が、予め定められた領域に含まれる場合には、前記角度の前記出現頻度に、前記少なくとも1つの輪郭点が予め定められた領域に含まれない場合に比べて大きい重み値による重み付けを行い、
前記重み値と、前記出現頻度と、の乗算値が最も低い前記角度を、前記荷電粒子の前記走査角度として決定することを含む、
請求項2に記載のパターン形状計測方法。
【請求項5】
前記予め定められた領域とは、
前記パターンの寸法を特定し得る輪郭点が含まれる領域である、
請求項3または4に記載のパターン形状計測方法。
【請求項6】
前記角度の出現頻度に基づいて、前記荷電粒子の走査角度を決定することは、
前記角度の前記出現頻度に前記指標線の長さに比例する重み値による重み付けを行い、
前記重み値と、前記出現頻度と、の乗算値が最も低い前記角度を、前記荷電粒子の前記走査角度として決定することを含む、
請求項2に記載のパターン形状計測方法。
【請求項7】
前記角度の出現頻度に基づいて、前記荷電粒子の走査角度を決定することは、
複数の前記角度のうち、前記出現頻度が低い順に2以上の前記角度のそれぞれを、前記走査角度として決定し、
前記角度の前記出現頻度が少ないほど前記走査角度における前記荷電粒子の走査回数が多くなるように、前記走査回数を決定し、
前記走査角度において、前記パターンを走査することは、
前記走査回数、及び前記走査回数において、前記パターンを走査することを含む、
請求項1に記載のパターン形状計測方法。
【請求項8】
前記形状データは、
前記パターンの画像データ、描画データ、及び設計データの少なくともいずれかである、
請求項1に記載のパターン形状計測方法。
【請求項9】
前記形状データは、
前記パターンに荷電粒子を走査することにより予め取得されたものである、
請求項1に記載のパターン形状計測方法。
【請求項10】
計測対象であるパターンの形状データに基づいて、前記パターンの輪郭点の位置情報を含む輪郭点データを生成する輪郭点データ生成部と、
前記輪郭点データから2以上の連続する輪郭点の位置情報を選択して、前記連続する輪郭点の位置情報からなる複数の抽出点データを生成する抽出点データ生成部と、
複数の前記抽出点データのそれぞれにおいて、前記連続する輪郭点に基づく指標線と、前記パターンの所定方向に沿って延びる基準線と、がなす角度を算出する角度算出部と、
前記角度の出現頻度に基づいて、前記パターンに対する荷電粒子の走査角度を決定する走査角度決定部と、
を備える、
パターン形状計測装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明の実施形態は、パターン形状計測方法、パターン形状計測装置、および半導体装置の製造方法に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
半導体デバイス製造のリソグラフィ工程で使用されるフォトマスクの製造工程において、光学像から逆問題を解くことでマスクパターンの形状を求めるILT(Inverse Lithography Technology)技術が用いられている。ILT技術が適用されたマスクパターンの形状は複雑化することがある。
【0003】
ところで、フォトマスク等の基板に形成されたパターンの形状を特定するためには、CD-SEM(Critical Dimension Scanning Electron Microscope)が用いられている。CD-SEMは、計測対象であるパターンに対して電子線を走査し、パターンエッジ等で強調される2次電子のピークを検出することにより、パターンの寸法を計測する。
【0004】
しかしながら、電子線の走査方向と略平行に延びるパターンエッジにおいては、連続的に発生した2次電子が、正帯電した基板側に引き寄せられることにより2次電子のピークが不明瞭となり、寸法の計測精度が低下することがある。このような現象は、ILT技術等が適用された複雑な形状を有するパターンの計測精度を悪化させる場合がある。
【先行技術文献】
【特許文献】
【0005】
特開2020-154401号公報
特開2013-57586号公報
国際公開第2018/020627号
国際公開第2014/208202号
特開2013-140179号公報
国際公開第2010/061516号
【発明の概要】
【発明が解決しようとする課題】
【0006】
1つの実施形態は、パターンの形状を高精度で計測可能なパターン形状計測方法、パターン形状計測装置、および半導体装置の製造方法を提供することを目的とする。
【課題を解決するための手段】
【0007】
実施形態のパターン形状計測方法は、計測対象であるパターンの形状データに基づいて、前記パターンの輪郭点の位置情報を含む輪郭点データを生成し、前記輪郭点データから2以上の連続する輪郭点の位置情報を選択して、前記連続する輪郭点の位置情報からなる複数の抽出点データを生成し、複数の前記抽出点データのそれぞれにおいて、前記連続する輪郭点に基づく指標線と、前記パターンの所定方向に沿って延びる基準線と、がなす角度を算出し、前記角度の出現頻度に基づいて、前記パターンに対する荷電粒子の走査角度を決定し、前記走査角度において、前記パターンを走査することを含む。
【図面の簡単な説明】
【0008】
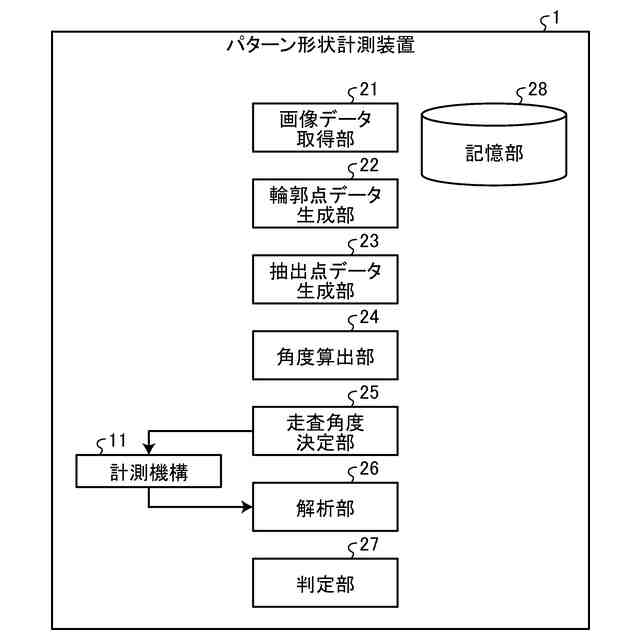
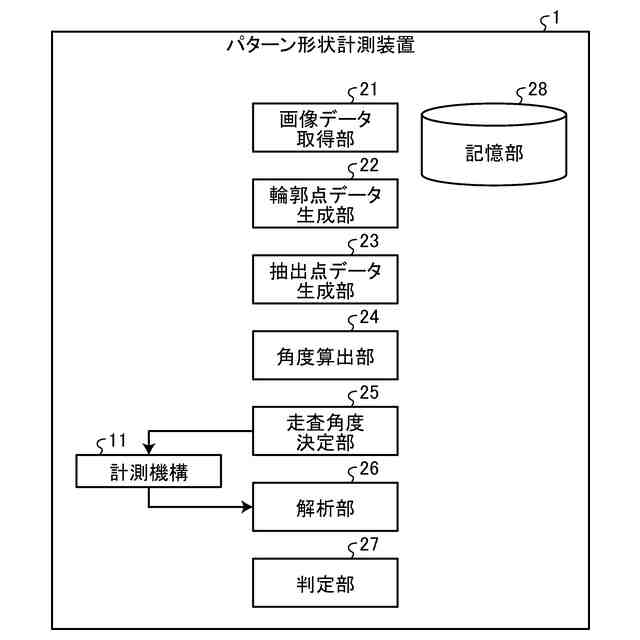
実施形態にかかるパターン形状計測装置の構成の一例を示すブロック図。
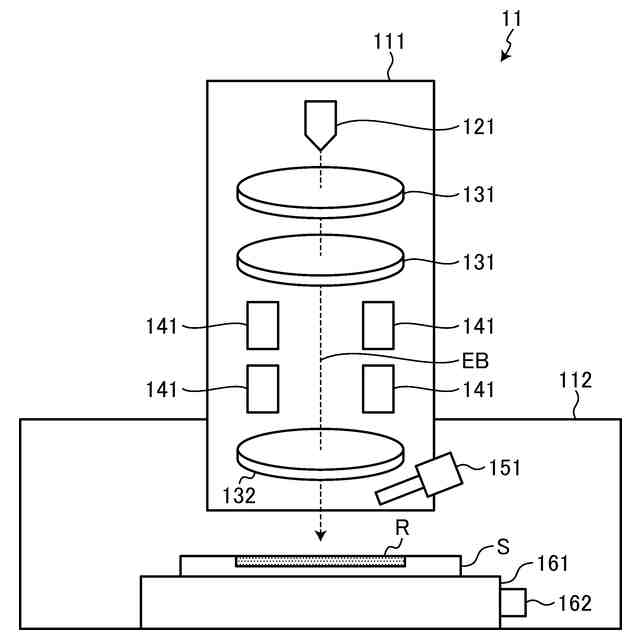
実施形態にかかる計測機構の構成の一例を模式的に示す図。
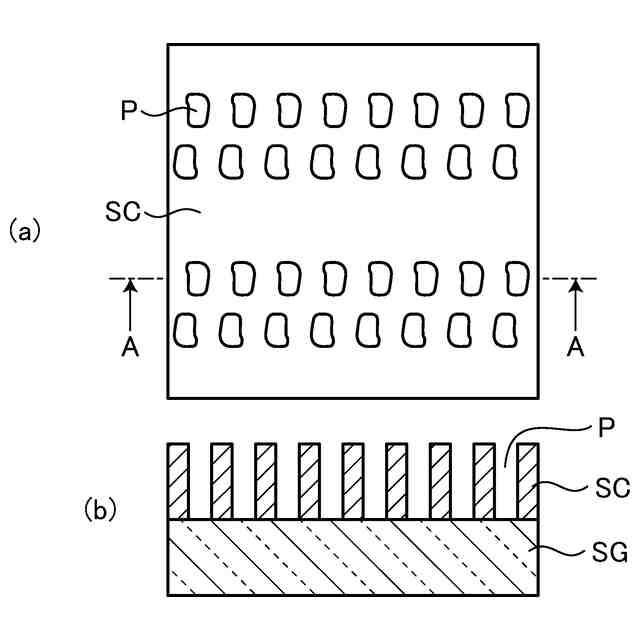
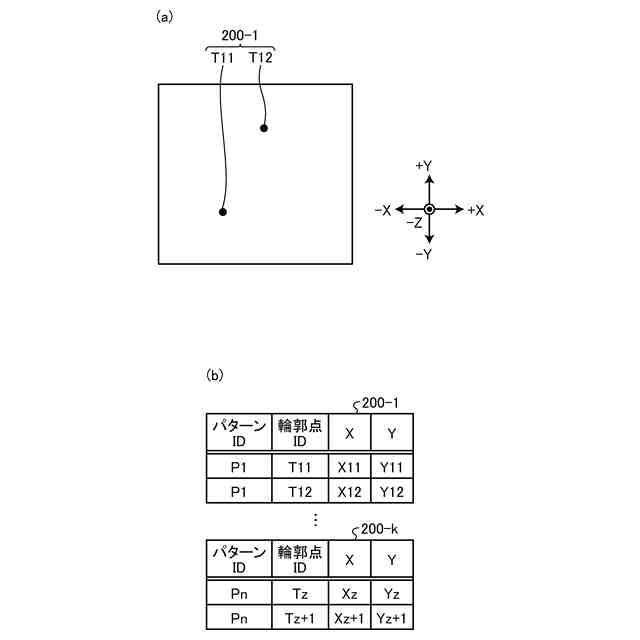
実施形態にかかるマスク基板の構成の一例を模式的に示す図。
実施形態にかかる画像データの一例を示す図。
実施形態にかかる輪郭点データの一例を示す図。
実施形態にかかる抽出点データの一例を示す図。
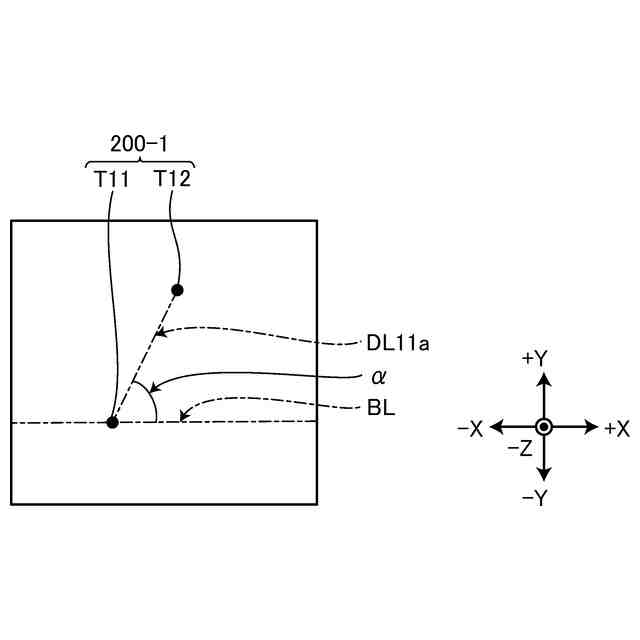
実施形態にかかる角度の算出方法について説明する図。
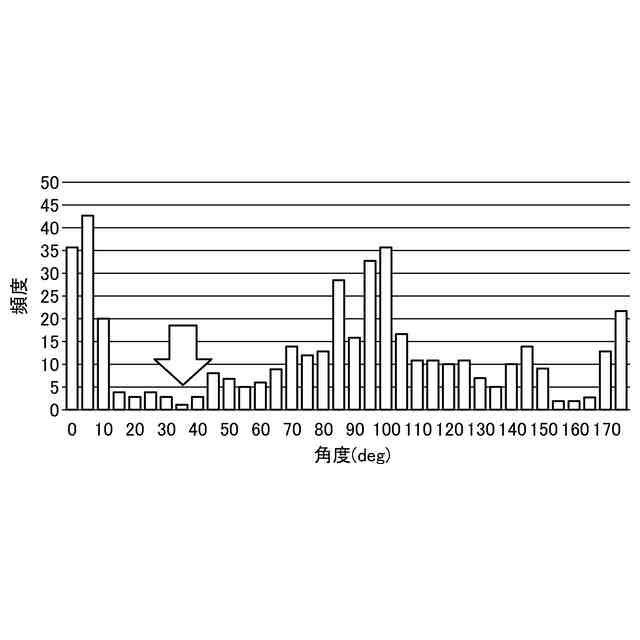
実施形態にかかる角度の出現頻度を表すヒストグラム。
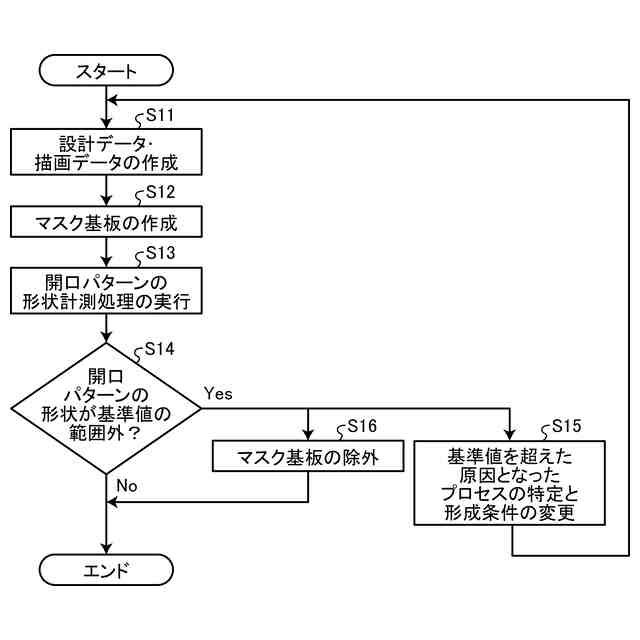
実施形態にかかる半導体装置の製造工程のうち、フォトマスクの製造工程について説明する図。
実施形態にかかる半導体装置の製造工程のうち、パターン形状計測方法について説明する図。
実施形態にかかる半導体装置の製造工程について説明する図。
変形例1にかかる抽出点データの一例を示す図。
変形例2にかかる抽出点データの生成方法について説明する図。
変形例3にかかる抽出点データと重みとの関係の一例を示す図。
変形例4にかかる走査角度の決定方法について説明する図。
変形例5にかかる走査角度の決定方法について説明する図。
【発明を実施するための形態】
【0009】
[実施形態]
以下に、本発明の実施形態につき図面を参照しつつ詳細に説明する。なお、下記の実施形態により、本発明が限定されるものではない。また、下記の実施形態における構成要素には、当業者が容易に想定できるものあるいは実質的に同一のものが含まれる。
【0010】
(パターン形状計測装置の構成例)
図1は、実施形態にかかるパターン形状計測装置1の構成の一例を示すブロック図である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
他の特許を見る
 特許ウォッチ
特許ウォッチ