TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024176098
公報種別
公開特許公報(A)
公開日
2024-12-19
出願番号
2023094347
出願日
2023-06-07
発明の名称
無人搬送車及び製造システム
出願人
株式会社村田製作所
代理人
個人
,
個人
主分類
B65H
19/12 20060101AFI20241212BHJP(運搬;包装;貯蔵;薄板状または線条材料の取扱い)
要約
【課題】巻芯をシート巻取装置に供給する際などに、ロールがダメージを受けてしまう状況を防ぐことができる無人搬送車及び製造システムを提供すること。
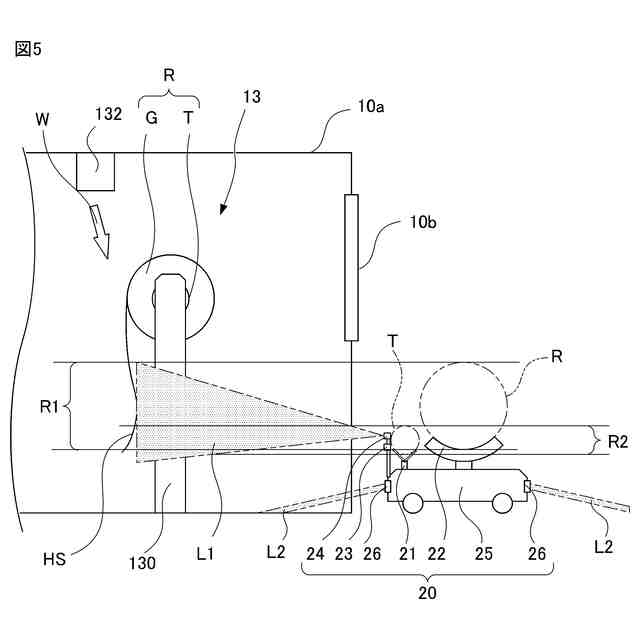
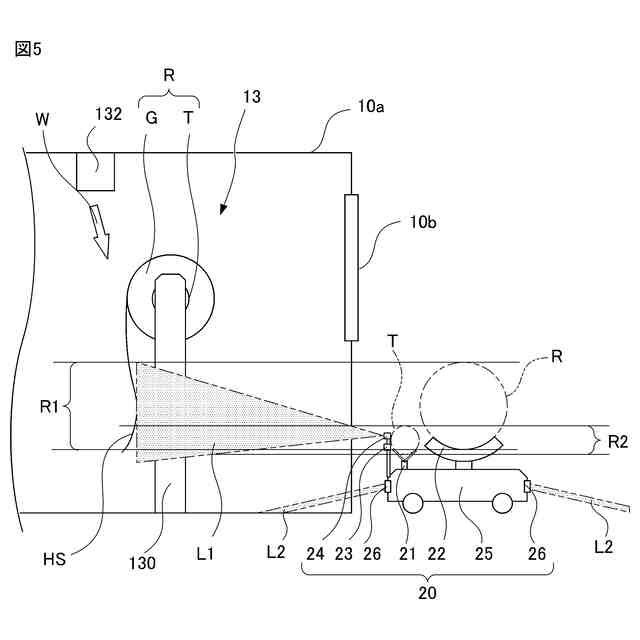
【解決手段】無人搬送車20は、無人搬送車であって、ロールを保持するロール保持部22と、無人搬送車20が進行したときのロール保持部22の通過位置を含むロール保持部通過領域R1の情報を取得する検知部23と、ロール保持部通過領域R1に向けて照明光L1を出射する照明部24と、ロール保持部22と検知部23と照明部24とを保持し、走行可能な走行部25bと、を備える。
【選択図】図5
特許請求の範囲
【請求項1】
無人搬送車であって、
ロールを保持するロール保持部と、
無人搬送車が進行したときの前記ロール保持部の通過位置を含むロール保持部通過領域の情報を取得する検知部と、
前記ロール保持部通過領域に向けて照明光を出射する照明部と、
を備える無人搬送車。
続きを表示(約 1,000 文字)
【請求項2】
表面に粘着剤を有する巻芯を保持する巻芯保持部をさらに備え、
前記検知部は、無人搬送車が進行したときにおける前記巻芯保持部に保持された巻芯の通過位置を含む巻芯通過領域の情報を取得し、
前記照明部は、前記巻芯通過領域に向けて照明光を出射する、
請求項1に記載の無人搬送車。
【請求項3】
前記検知部は、前記ロール保持部通過領域の画像情報を取得する画像センサである、請求項1又は2に記載の無人搬送車。
【請求項4】
前記検知部は、前記巻芯通過領域の画像情報を取得する画像センサである、請求項2に記載の無人搬送車。
【請求項5】
前記照明部が出射する照明光は、フラッシュ光である、請求項1又は2に記載の無人搬送車。
【請求項6】
無人搬送車は、シート巻取装置からロールを回収して搬送する無人搬送車であり、
前記検知部は、前記シート巻取装置にセットされたロールから垂れたシートの存在を検知する、請求項1又は2に記載の無人搬送車。
【請求項7】
無人搬送車は、シート巻取装置に巻芯を搬送する無人搬送車であり、
前記検知部は、前記シート巻取装置にセットされたロールから垂れたシートの存在を検知する、請求項2に記載の無人搬送車。
【請求項8】
無人搬送車の進行先の床面における障害物の有無を検知するための床面障害物検知用の床面障害物検知部をさらに備える、請求項1又は2に記載の無人搬送車。
【請求項9】
請求項1に記載の無人搬送車を含む製造システムであって、
シートを巻き取ってロールを製造するシート巻取装置と、
制御部と、を備え、
前記制御部は、前記検知部により取得された前記ロール保持部通過領域の情報に基づき、前記シート巻取装置にセットされたロールから垂れたシートの存在の有無を判定する、製造システム。
【請求項10】
前記照明部は、時間を空けて複数回の照明光を出射し、
前記検知部は、複数回の照明光の出射タイミングに対応して、複数のタイミングの前記ロール保持部通過領域の情報を取得し、
前記制御部は、前記複数のタイミングの前記ロール保持部通過領域の情報に基づき、前記シート巻取装置にセットされたロールから垂れたシートの存在の有無を判定する、請求項9に記載の製造システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、無人搬送車及び製造システムに関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
従来、ロールを保持するロール保持部や、表面に粘着剤を有する巻芯を保持する巻芯保持部を備える無人搬送車が知られている。例えば特許文献1には、巻芯をシート巻取装置に供給し、ロールをシート巻取装置から回収する無人搬送車が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2004-91007号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ここで、シート巻取装置にセットされているロールからシートが垂れている状況下において無人搬送車がシート巻取装置に進入してしまうと、無人搬送車の一部と、ロールから垂れているシートとが接触して絡みつくなどし、その結果としてロールがダメージを受けてしまう場合がある。
【0005】
本発明は、無人搬送車がシート巻取装置に進入する際などに、ロールがダメージを受けてしまう状況を防ぐことができる無人搬送車を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の無人搬送車は、無人搬送車であって、ロールを保持するロール保持部と、無人搬送車が進行したときの前記ロール保持部の通過位置を含むロール保持部通過領域の情報を取得する検知部と、前記ロール保持部通過領域に向けて照明光を出射する照明部と、備える。
【0007】
本発明の無人搬送車は、無人搬送車であって、表面に粘着剤を有する巻芯を保持する巻芯保持部と、無人搬送車が進行したときにおける前記巻芯保持部に保持された巻芯の通過位置を含む巻芯通過領域の情報を取得する検知部と、前記巻芯通過領域に向けて照明光を出射する照明部と、を備える。
【発明の効果】
【0008】
本発明によれば、無人搬送車がシート巻取装置に進入する際などに、ロールがダメージを受けてしまう状況を防ぐことができる無人搬送車及び製造システムを提供できる。
【図面の簡単な説明】
【0009】
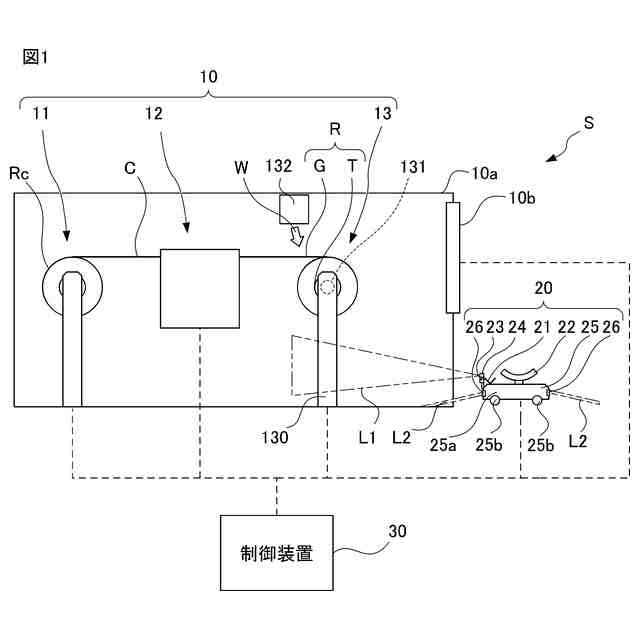
本発明の一実施形態に係る無人搬送車を含む製造システムを示す模式図である。
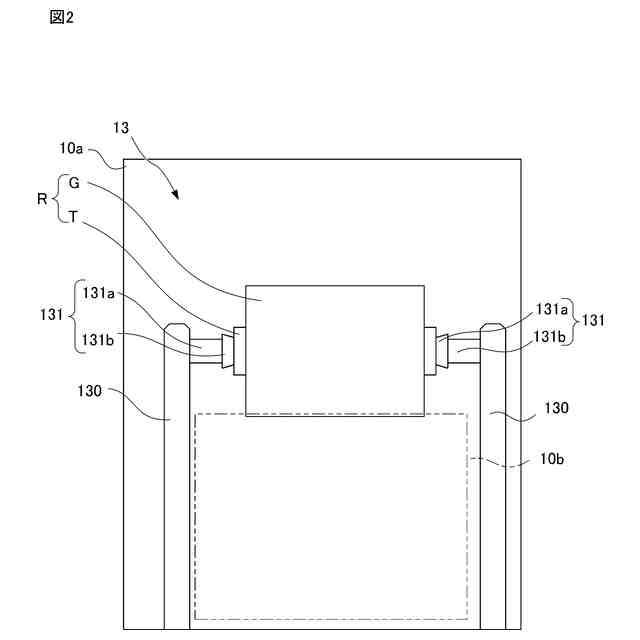
本実施形態に係る巻取部を正面(搬送方向下流側)から見た模式図である。
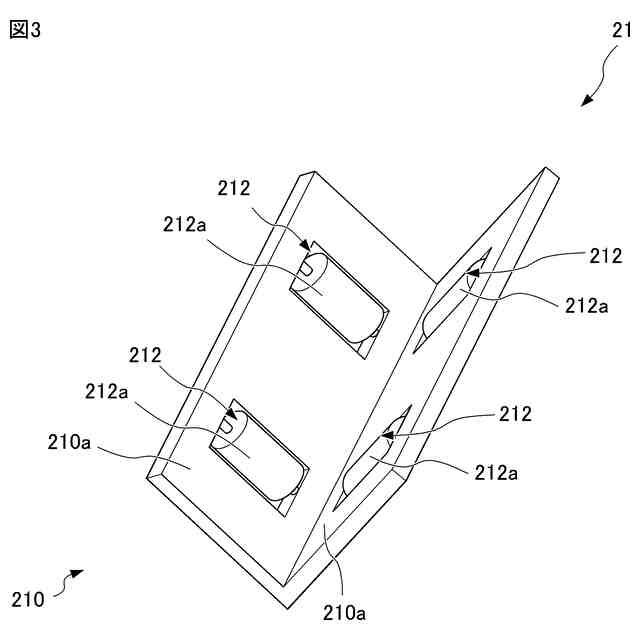
本実施形態に係る巻芯保持部の保持部本体の鳥観図である。
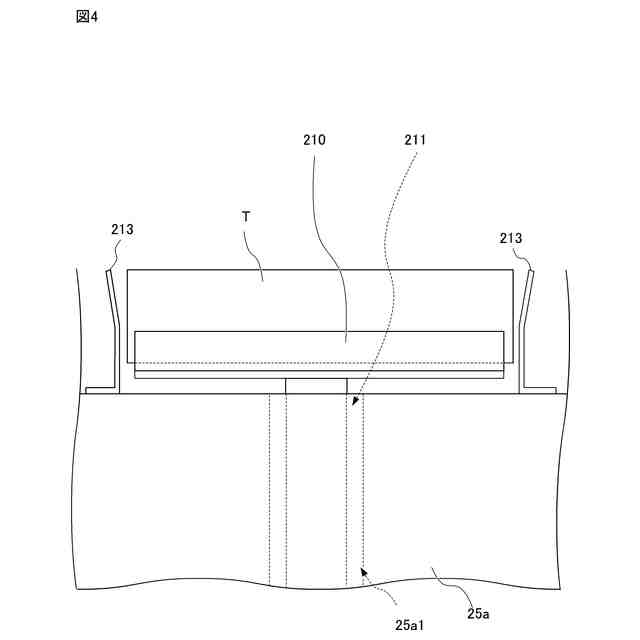
無人搬送車の正面から見た場合の巻芯保持部の模式図である。
本実施形態に係るロール保持部通過領域及び巻芯通過領域を示す模式図である。
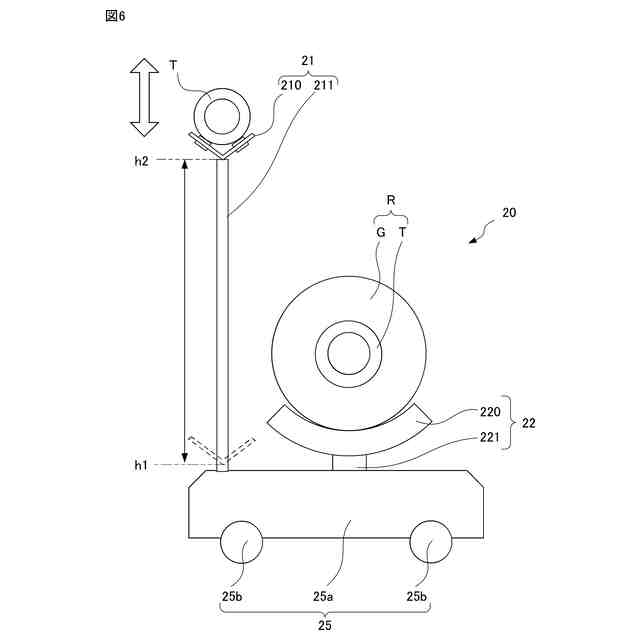
巻芯保持部の昇降動作を示す模式図である。
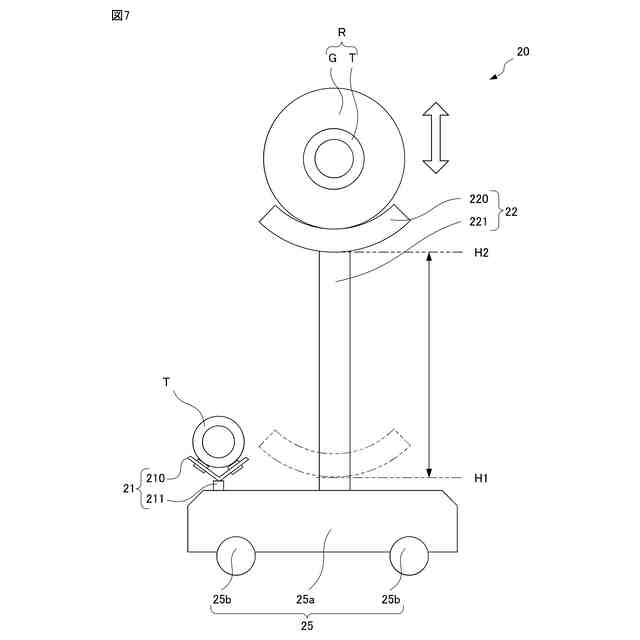
ロール保持部の昇降動作を示す模式図である。
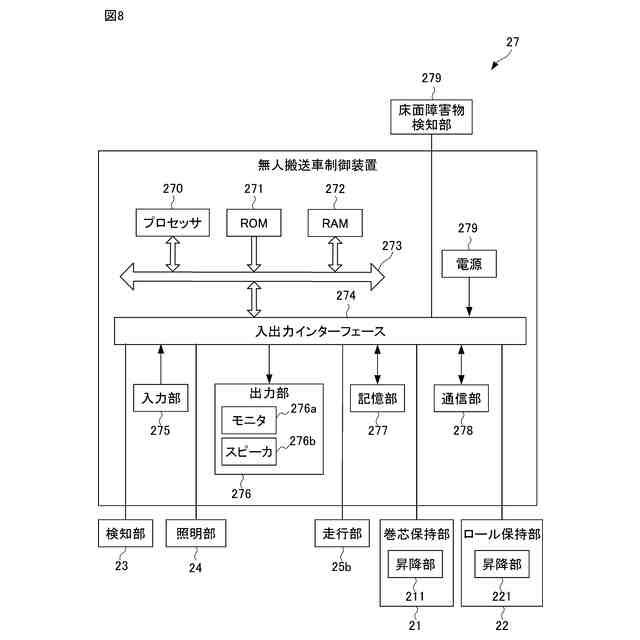
本実施形態に係る無人搬送車のハードウェア構成を示すブロック図である。
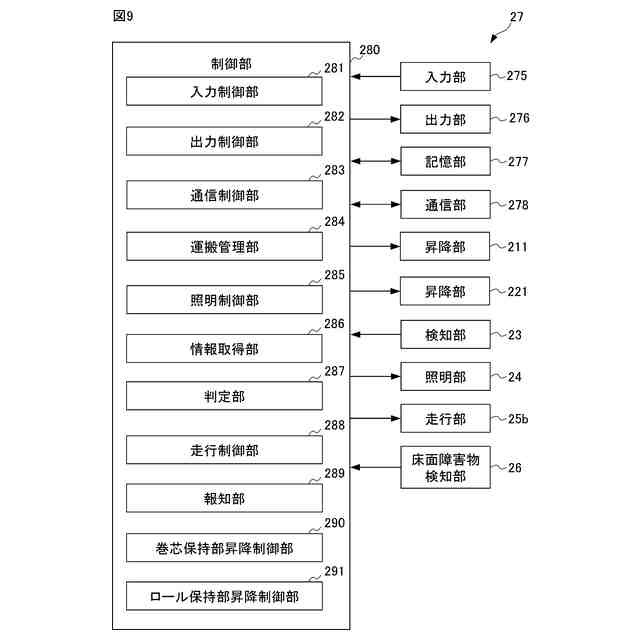
本実施形態に係る無人搬送車制御装置の機能的構成を示すブロック図である。
本実施形態に係るセラミックグリーンシート成型装置のハードウェア構成を示すブロック図である。
本実施形態に係る制御装置の機能的構成を示すブロック図である。
本実施形態に係るロール製造工程の流れを説明するためのフローチャートである。
図12のロール製造工程に含まれるロール巻取工程の流れを説明するためのフローチャートである。
図13のロール巻取工程を連続して行う場合のロール取り外し工程及び巻芯セット工程の流れを説明するためのフローチャートである。
図14の巻芯セット工程に含まれるロール回収動作のうちの前半部分を説明するための模式図である。
図14の巻芯セット工程に含まれるロール回収動作のうちの後半部分を説明するための模式図である。
図14の巻芯セット工程に含まれる巻芯セット動作のうちの前半部分を説明するための模式図である。
図14の巻芯セット工程に含まれる巻芯セット動作のうちの後半部分を説明するための模式図である。
本実施形態に係るフィルム垂れ検知処理の流れを説明するためのフローチャートである。
本実施形態に係るフィルム垂れ検知方法を説明するための模式図である。
変形例における図2に相当する模式図である。
図21の側方から見た場合の巻芯保持部の模式図である。
【発明を実施するための形態】
【0010】
以下、本実施形態の無人搬送車を含む製造システムSについて、図1、2を用いて説明する。図1は、本発明の一実施形態に係る無人搬送車を含む製造システムSを示す模式図である。図2は、本実施形態に係る巻取部を正面(搬送方向下流側)から見た模式図である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
他の特許を見る
 特許ウォッチ
特許ウォッチ