TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024174445
公報種別
公開特許公報(A)
公開日
2024-12-17
出願番号
2023092271
出願日
2023-06-05
発明の名称
車両用制御装置、車両制御方法、およびプログラム
出願人
本田技研工業株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
B60W
50/08 20200101AFI20241210BHJP(車両一般)
要約
【課題】ドライバの意図に応じた車両の制御を実現すること。
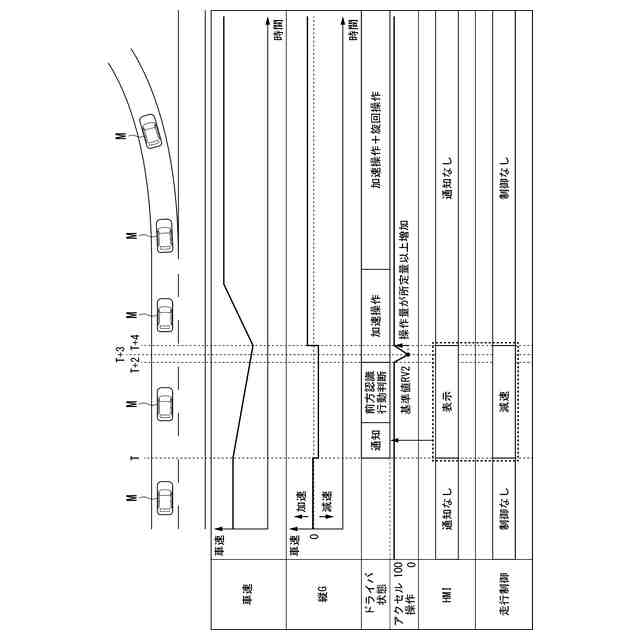
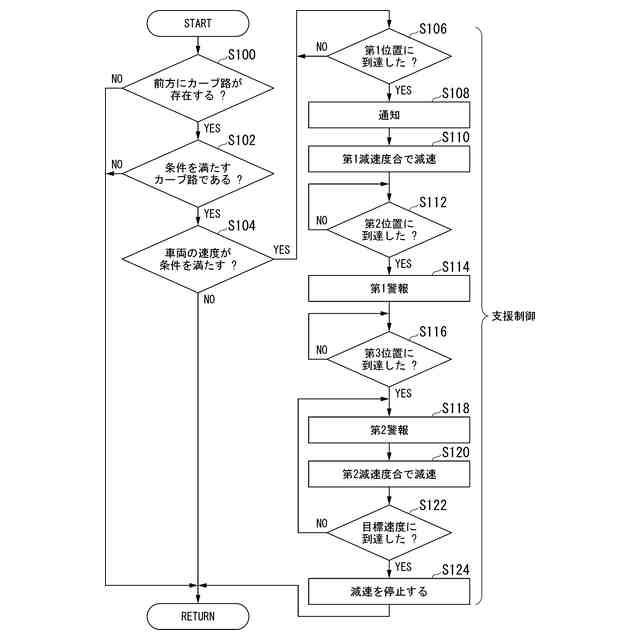
【解決手段】 車両の進行方向に存在するカーブ路に関する第1情報を取得する第1取得部と、前記車両のドライバの加速操作量を含む第2情報を取得する第2取得部と、前記車両が、前記カーブ路の入口から前記入口の所定距離手前までの区間または前記カーブ路を走行中である場合、前記第1情報に基づく目標速度に前記車両の速度を近づけるように前記車両を減速させる減速制御と、前記目標速度に前記車両の速度を近づけることを報知する報知制御との一方または双方を含む支援制御を行う制御部と、を備え、前記制御部は、前記支援制御の実行中、前記第2情報を参照し、前記加速操作量が所定量以上増加した場合に前記支援制御を停止する、車両用制御装置。
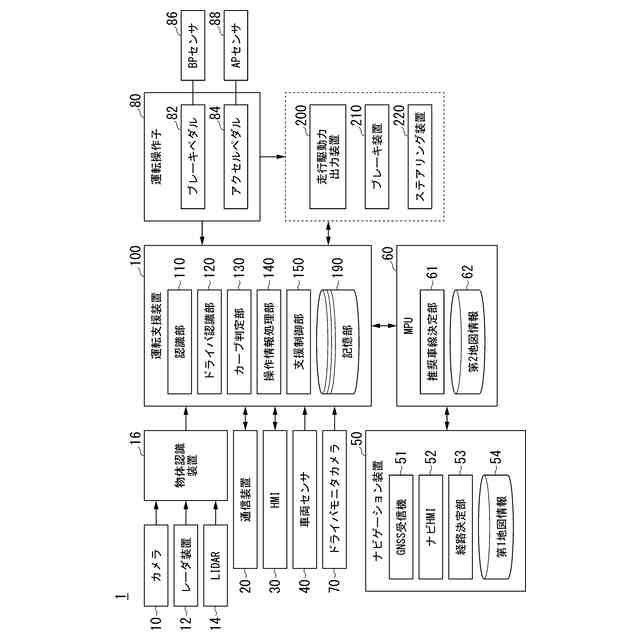
【選択図】図1
特許請求の範囲
【請求項1】
車両の進行方向に存在するカーブ路に関する第1情報を取得する第1取得部と、
前記車両のドライバの加速操作量を含む第2情報を取得する第2取得部と、
前記車両が、前記カーブ路の入口から前記入口の所定距離手前までの区間または前記カーブ路を走行中である場合、前記第1情報に基づく目標速度に前記車両の速度を近づけるように前記車両を減速させる減速制御と、前記目標速度に前記車両の速度を近づけることを報知する報知制御との一方または双方を含む支援制御を行う制御部と、を備え、
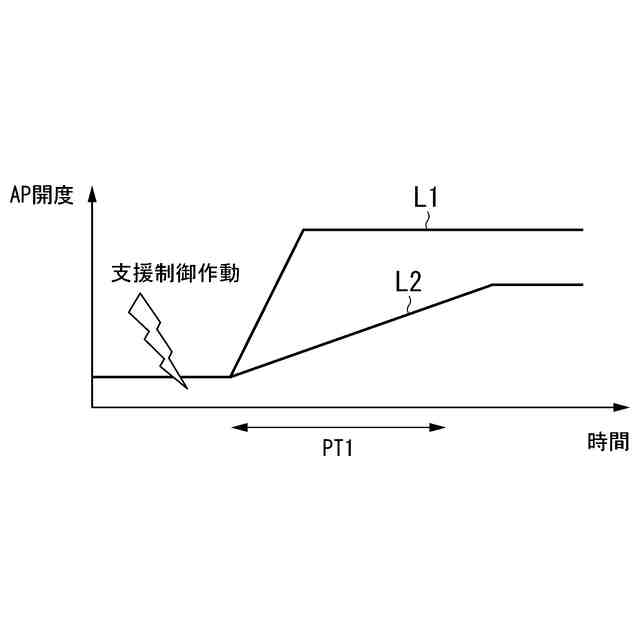
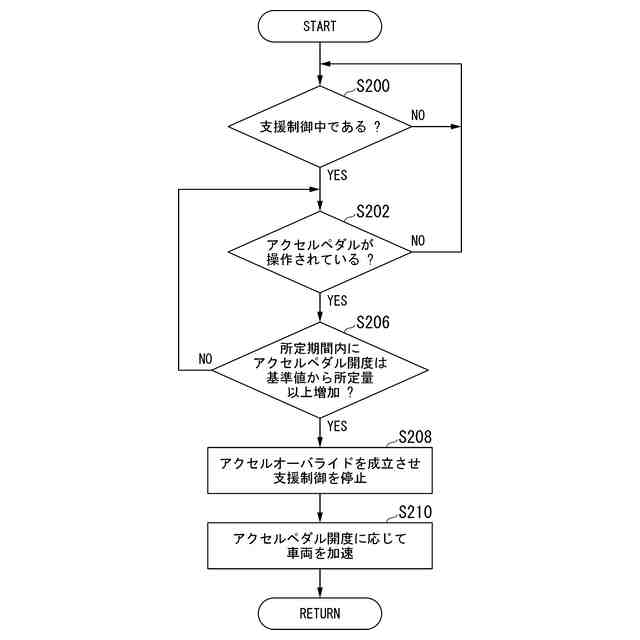
前記制御部は、前記支援制御の実行中、前記第2情報を参照し、前記加速操作量が所定量以上増加した場合に前記支援制御を停止する、
車両用制御装置。
続きを表示(約 890 文字)
【請求項2】
前記制御部は、前記支援制御の実行中、前記加速操作量が基準値から所定量以上増加した場合に前記支援制御を停止し、
前記基準値は、前記支援制御の開始時における前記加速操作量に設定される、
請求項1に記載の車両用制御装置。
【請求項3】
前記制御部は、前記支援制御の実行中、前記加速操作量が基準値から所定量以上増加した場合に前記支援制御を停止し、
前記基準値は、前記支援制御の実行中における前記加速操作量の最小値に設定される、
請求項1に記載の車両用制御装置。
【請求項4】
コンピュータが、
車両の進行方向に存在するカーブ路に関する第1情報を取得し、
前記車両のドライバの加速操作量を含む第2情報を取得し、
前記車両が、前記カーブ路の入口から前記入口の所定距離手前までの区間または前記カーブ路を走行中である場合、前記第1情報に基づく目標速度に前記車両の速度を近づけるように前記車両を減速させる減速制御と、前記目標速度に前記車両の速度を近づけることを報知する報知制御との一方または双方を含む支援制御を行い、
前記支援制御の実行中、前記第2情報を参照し、前記加速操作量が所定量以上増加した場合に前記支援制御を停止する、
車両制御方法。
【請求項5】
コンピュータに、
車両の進行方向に存在するカーブ路に関する第1情報を取得させ、
前記車両のドライバの加速操作量を含む第2情報を取得させ、
前記車両が、前記カーブ路の入口から前記入口の所定距離手前までの区間または前記カーブ路を走行中である場合、前記第1情報に基づく目標速度に前記車両の速度を近づけるように前記車両を減速させる減速制御と、前記目標速度に前記車両の速度を近づけることを報知する報知制御との一方または双方を含む支援制御を行わせ、
前記支援制御の実行中、前記第2情報を参照し、前記加速操作量が所定量以上増加した場合に前記支援制御を停止させる、
プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両用制御装置、車両制御方法、およびプログラムに関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
近年、種々の状況に配慮した持続可能な輸送システムを提供する取り組みが活発化している。この実現に向けて運転支援技術に関する研究開発を通して交通の安全性や利便性をより一層改善する研究開発に注力している。例えば、カーブ進入前の車両に対し、カーブに安全に進入可能な安全速度になるまで制動力を付与する自動ブレーキ装置が開示されている(例えば特許文献1参照)。この自動ブレーキ装置は、カーブの進入口までの距離が所定距離以上であるかどうかを判定し、所定距離以上であると判定したとき、ドライバの加速意図の有無を判定し、加速意図の有無に応じて、制動力を減圧する。
【先行技術文献】
【特許文献】
【0003】
特許第5190022号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来の装置では、ドライバの意図に応じた車両の制御を実現することができないことがあった。例えば、ドライバの意図に応じた加速を車両にさせることができないことがあった。
【0005】
本発明は、このような事情を考慮してなされたものであり、ドライバの意図に応じた車両の制御を実現することができる。例えば、ドライバの意図に応じた加速を車両にさせることができる。延いては乗員を配慮して、持続可能な輸送システムの発展への寄与することができる。
【課題を解決するための手段】
【0006】
この発明に係る車両用制御装置、車両制御方法、およびプログラムは、以下の構成を採用した。
(1):この発明の一態様に係る車両用制御装置は、車両の進行方向に存在するカーブ路に関する第1情報を取得する第1取得部と、前記車両のドライバの加速操作量を含む第2情報を取得する第2取得部と、前記車両が、前記カーブ路の入口から前記入口の所定距離手前までの区間または前記カーブ路を走行中である場合、前記第1情報に基づく目標速度に前記車両の速度を近づけるように前記車両を減速させる減速制御と、前記目標速度に前記車両の速度を近づけることを報知する報知制御との一方または双方を含む支援制御を行う制御部と、を備え、前記制御部は、前記支援制御の実行中、前記第2情報を参照し、前記加速操作量が所定量以上増加した場合に前記支援制御を停止するものである。
【0007】
(2):上記(1)の態様において、前記制御部は、前記支援制御の実行中、前記加速操作量が基準値から所定量以上増加した場合に前記支援制御を停止し、前記基準値は、前記支援制御の開始時における前記加速操作量に設定されるものである。
【0008】
(3):上記(1)の態様において、前記制御部は、前記支援制御の実行中、前記加速操作量が基準値から所定量以上増加した場合に前記支援制御を停止し、前記基準値は、前記支援制御の実行中における前記加速操作量の最小値に設定されるものである。
【0009】
(4):本発明の他の態様に係る車両制御方法は、コンピュータが、車両の進行方向に存在するカーブ路に関する第1情報を取得し、前記車両のドライバの加速操作量を含む第2情報を取得し、前記車両が、前記カーブ路の入口から前記入口の所定距離手前までの区間または前記カーブ路を走行中である場合、前記第1情報に基づく目標速度に前記車両の速度を近づけるように前記車両を減速させる減速制御と、前記目標速度に前記車両の速度を近づけることを報知する報知制御との一方または双方を含む支援制御を行い、前記支援制御の実行中、前記第2情報を参照し、前記加速操作量が所定量以上増加した場合に前記支援制御を停止するものである。
【0010】
(5):本発明の他の態様に係るプログラムは、コンピュータに、車両の進行方向に存在するカーブ路に関する第1情報を取得させ、前記車両のドライバの加速操作量を含む第2情報を取得させ、前記車両が、前記カーブ路の入口から前記入口の所定距離手前までの区間または前記カーブ路を走行中である場合、前記第1情報に基づく目標速度に前記車両の速度を近づけるように前記車両を減速させる減速制御と、前記目標速度に前記車両の速度を近づけることを報知する報知制御との一方または双方を含む支援制御を行わせ、前記支援制御の実行中、前記第2情報を参照し、前記加速操作量が所定量以上増加した場合に前記支援制御を停止させるものである。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
他の特許を見る
 特許ウォッチ
特許ウォッチ