TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024172554
公報種別
公開特許公報(A)
公開日
2024-12-12
出願番号
2023090343
出願日
2023-05-31
発明の名称
足元位置認識方法
出願人
トヨタ自動車株式会社
代理人
弁理士法人高田・高橋国際特許事務所
主分類
G06T
7/00 20170101AFI20241205BHJP(計算;計数)
要約
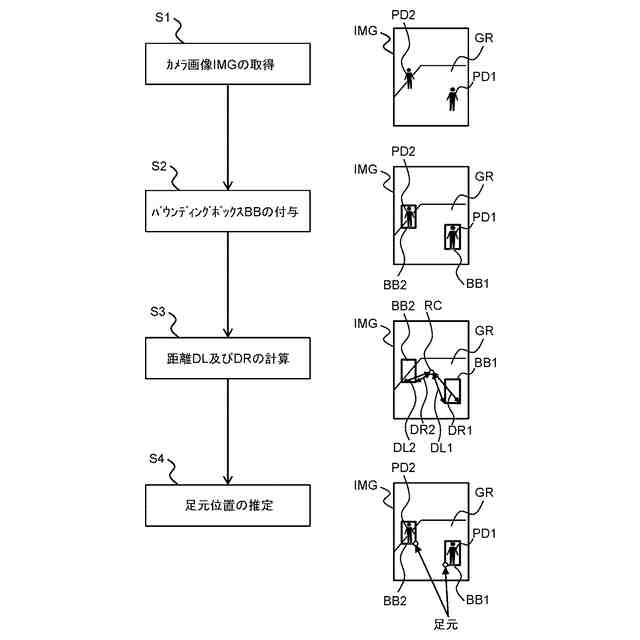
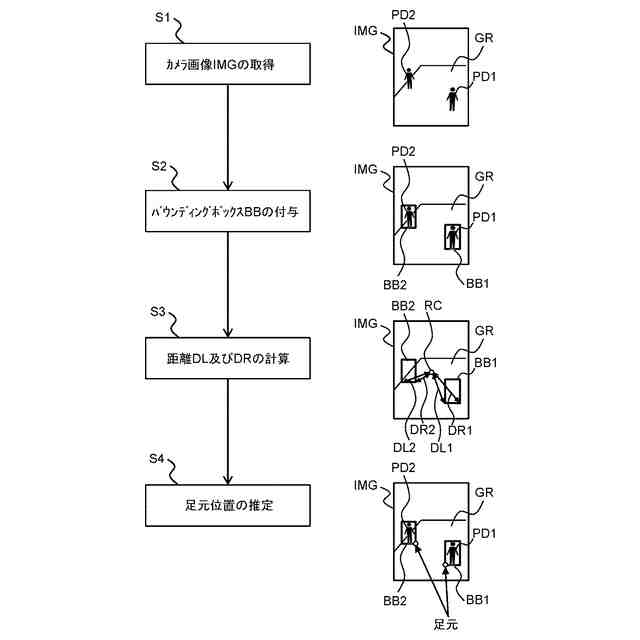
【課題】バウンディングボックスを用いてカメラ画像に含まれる人物の足元位置を認識する場合において、この認識の誤差を低減する。
【解決手段】カメラ画像に含まれる人物の足元の位置を認識する方法が提供される。この方法では、まず、カメラ画像が取得される。カメラ画像にはカメラの画角の範囲に存在する歩行面と、この画角の範囲に存在する人物とが含まれる。続いて、カメラ画像に含まれる人物を囲む矩形のバウンディングボックスが付与される。続いて、左方及び右方距離が計算される。左方及び右方距離は、カメラ画像において基準座標からバウンディングボックスの左下及び右下の頂点の座標までの各距離を示す。基準座標は、歩行面とカメラの光軸が交わる位置に対応する座標を示す。右方及び左方距離のうち短い距離を有する頂点の座標が、バウンディングボックスにより囲まれた人物の足元位置として推定される。
【選択図】図1
特許請求の範囲
【請求項1】
カメラ画像に含まれる人物の足元の位置を認識する方法であって、
前記カメラ画像を取得するステップであって、前記カメラ画像にはカメラの画角の範囲に存在する歩行面と、前記画角の範囲に存在する人物とが含まれるステップと、
前記カメラ画像に含まれる人物を囲む矩形のバウンディングボックスを付与するステップと、
前記カメラ画像において前記歩行面と前記カメラの光軸が交わる位置に対応する座標を示す基準座標から前記バウンディングボックスの左下の頂点の座標までの距離を示す左方距離と、前記カメラ画像において前記基準座標から前記バウンディングボックスの右下の頂点の座標までの距離を示す右方距離と、を計算するステップと、
前記右方距離及び前記左方距離のうち短い距離を有する頂点の座標を、前記バウンディングボックスにより囲まれた人物の足元位置として推定するステップと、
を含む
ことを特徴とする足元位置認識方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、カメラ画像に含まれる人物の足元の位置を認識する方法に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
特開2021-067469号公報は、カメラの位置又は任意の位置から当該カメラに写った被写体までの距離を推定する方法を開示する。この従来の方法では、まず、被写体(人物)が写る画像が取得される。続いて、この画像における被写体の表示領域を囲む矩形のバウンディングボックスが付与され、被写体の足元位置が推定される。足元位置は、バウンディングボックスの下辺の中心座標から推定される。カメラの位置又は任意の位置から被写体までの距離は、この足元位置を変数とする推定モデルを用いて推定される。
【0003】
本開示に関連する技術分野の技術水準を示す文献としては、特開2021-067469号公報の他に、特許第6397354号公報及び特開2021-056717号公報を例示することができる。
【先行技術文献】
【特許文献】
【0004】
特開2021-067469号公報
特許第6397354号公報
特開2021-056717号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、バウンディングボックスの下辺の中点を人物の足元位置と推定した場合、カメラ画像内の人物の座標によってはこの足元位置の認識に誤差が生じることがある。よって、この認識の誤差を低減するための改良が求められる。
【0006】
本開示の1つの目的は、バウンディングボックスを用いてカメラ画像に含まれる人物の足元位置を認識する場合において、この認識の誤差を低減することが可能な技術を提供することにある。
【課題を解決するための手段】
【0007】
本開示は、カメラ画像に含まれる人物の足元の位置を認識する方法であり、次の特徴を有する。
前記方法は、
前記カメラ画像を取得するステップであって、前記カメラ画像にはカメラの画角の範囲に存在する歩行面と、前記画角の範囲に存在する人物とが含まれるステップと、
前記カメラ画像に含まれる人物を囲む矩形のバウンディングボックスを付与するステップと、
前記カメラ画像において前記歩行面と前記カメラの光軸が交わる位置に対応する座標を示す基準座標から前記バウンディングボックスの左下の頂点の座標までの距離を示す左方距離と、前記カメラ画像において前記基準座標から前記バウンディングボックスの右下の頂点の座標までの距離を示す右方距離と、を計算するステップと、
前記右方距離及び前記左方距離のうち短い距離を有する頂点の座標を、前記バウンディングボックスにより囲まれた人物の足元位置として推定するステップと、
を含む。
【発明の効果】
【0008】
右方距離よりも左方距離の方が短い場合は、バウンディングボックスにより囲まれた人物がカメラ画像の右側に位置している可能性が高い。反対に、左方距離よりも右方距離の方が短い場合は、バウンディングボックスにより囲まれた人物がカメラ画像の左側に位置している可能性が高い。また、カメラ画像の右側に位置する人物の足元はバウンディングボックスの下辺の中点の座標よりも左側に寄る傾向があり、カメラ画像の左側に位置する人物の足元は、この中点よりも右側に寄る傾向がある。本開示はこの特徴に着目したものである。本開示によれば、バウンディングボックスの右下又は左下の頂点の座標のうち、基準座標からの距離が短い頂点の座標を人物の足元位置と推定することができる。従って、バウンディングボックスの下辺の中点の座標を足元位置と認識する場合に比べて、認識の誤差の低減が期待される。
【図面の簡単な説明】
【0009】
実施形態に係る足元位置認識方法を説明する図である。
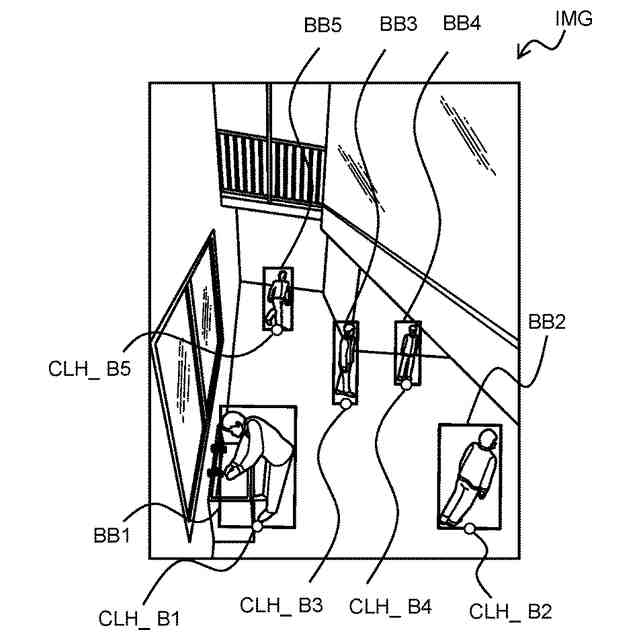
従来の足元位置認識方法の一例を説明する図である。
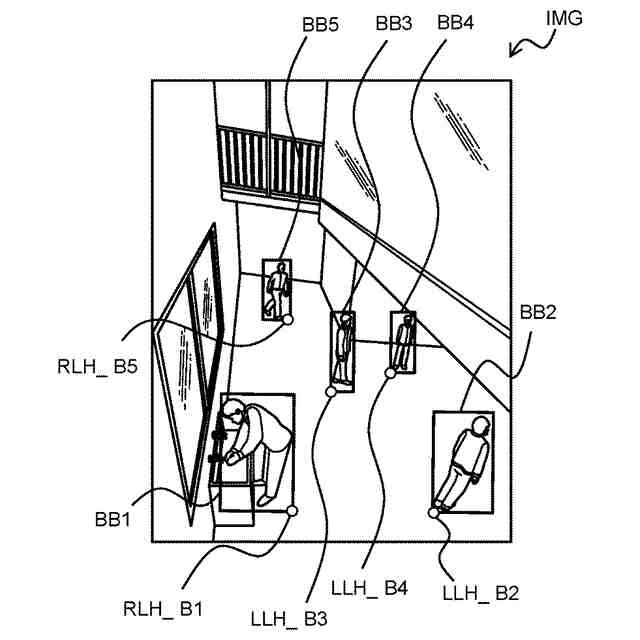
実施形態に係る方法を図2に示したカメラ画像に適用した場合を説明する図である。
【発明を実施するための形態】
【0010】
以下、図面を参照しながら、本開示の実施形態について説明する。尚、各図において、同一又は相当する部分には同一符号を付してその説明を簡略化し又は省略する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
他の特許を見る
 特許ウォッチ
特許ウォッチ