TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024170774
公報種別
公開特許公報(A)
公開日
2024-12-11
出願番号
2023087486
出願日
2023-05-29
発明の名称
車両制御装置及び車両制御方法
出願人
三菱電機株式会社
代理人
弁理士法人ぱるも特許事務所
主分類
B60W
30/00 20060101AFI20241204BHJP(車両一般)
要約
【課題】本線から分流車線に移行した後、前方に減速地点が存在する場合に、加速及び減速を適切に行って、減速地点までの走行の乗り心地を向上できる車両制御装置及び車両制御方法を提供する。
【解決手段】減速地点の手前に分流車線が存在する場合に、分流車線への移行運転の開始地点の手前では、速度指令値に基づいて自車両の目標速度を設定し、分流車線への移行運転の開始地点の前方では、速度指令値、分流車線への移行運転の開始地点の自車両の走行速度、分流車線への移行運転の開始地点から減速地点までの残り距離、及び減速地点速度に基づいて、目標速度を設定する車両制御装置。
【選択図】図1
特許請求の範囲
【請求項1】
自車両の走行状態、前記自車両の周辺の道路情報、及び前記自車両の周辺の他車両の情報を取得する情報取得部と、
前記自車両の目標走行経路を設定する目標走行経路設定部と、
前記走行状態、前記目標走行経路、及び前記道路情報に基づいて、前記目標走行経路上において、前記自車両が走行すべき速度が前記自車両の現在の走行速度よりも小さくなる地点である減速地点を設定し、前記減速地点で走行すべき速度である減速地点速度を設定する減速地点設定部と、
前記目標走行経路上において、前記自車両の現在位置と前記減速地点との間に、前記自車両の減速を開始する地点である減速開始地点を設定する減速開始地点設定部と、
目標速度を設定する目標走行状態設定部と、
前記目標速度に基づいて、前記自車両を制御する車両制御部と、
を備え、
前記減速開始地点設定部は、前記目標走行経路上において、前記減速地点の手前に本線から分流する分流車線が存在する場合に、前記本線から前記分流車線への移行運転の開始地点の前方に前記減速開始地点を設定し、
前記目標走行状態設定部は、前記減速地点の手前に前記分流車線が存在する場合に、前記分流車線への移行運転の開始地点の手前では、速度指令値に基づいて前記自車両の目標速度を設定し、前記分流車線への移行運転の開始地点の前方では、前記速度指令値、前記自車両の現在の走行速度、前記分流車線への移行運転の開始地点から前記減速地点までの残り距離、及び前記減速地点速度に基づいて、前記目標速度を設定し、
前記自車両の前方の判定範囲内に前記他車両が存在する場合には、前記他車両の走行速度に応じて前記目標速度を補正する車両制御装置。
続きを表示(約 1,400 文字)
【請求項2】
前記減速地点は、前記自車両が走行すべき速度が切り替わる地点であり、
前記減速地点設定部は、制限速度の切替地点、道路種別の切替地点、道路曲率の変化による速度の切替地点の少なくとも一つに基づいて、前記減速地点を設定する請求項1に記載の車両制御装置。
【請求項3】
前記目標走行状態設定部は、前記本線から前記分流車線に移行するために車線変更が必要な場合において、前記分流車線の開始地点に到達した後であって、且つドライバによる方向指示器の操作を検出した地点を、前記分流車線への移行運転の開始地点として設定し、
前記本線から前記分流車線に移行するために車線変更が不要な場合において、前記分流車線の開始地点を、前記分流車線への移行運転の開始地点として設定する請求項1に記載の車両制御装置。
【請求項4】
前記目標走行状態設定部は、前記速度指令値に従って走行すると仮定した場合における、前記分流車線への移行運転の開始地点から前記減速開始地点までの予想走行時間を演算し、前記予想走行時間が、判定時間未満になる場合は、前記自車両の現在の走行速度と前記速度指令値との小さい方を、前記分流車線への移行運転の開始地点から前記減速開始地点までの前記目標速度として設定する請求項1に記載の車両制御装置。
【請求項5】
前記目標走行状態設定部は、前記速度指令値に従って走行すると仮定した場合における、前記分流車線への移行運転の開始地点から前記減速開始地点までの予想走行時間を演算し、前記予想走行時間が、判定時間未満になる場合は、前記分流車線への移行運転の開始地点から前記減速開始地点までの予想走行時間が前記判定時間になるように、前記分流車線への移行運転の開始地点から前記減速開始地点までの前記目標速度を設定する請求項1に記載の車両制御装置。
【請求項6】
前記目標走行状態設定部は、前記速度指令値に従って走行すると仮定した場合における、前記分流車線への移行運転の開始地点から前記減速開始地点までの予想走行時間を演算し、前記予想走行時間が、判定時間以上になる場合は、前記速度指令値を、前記分流車線への移行運転の開始地点から前記減速開始地点までの前記目標速度として設定する請求項1に記載の車両制御装置。
【請求項7】
前記予想走行時間は、前記自車両の現在の走行速度から前記速度指令値に到達するまでの加速時間を含まない請求項4から6のいずれか一項に記載の車両制御装置。
【請求項8】
前記予想走行時間は、前記自車両の現在の走行速度から前記速度指令値に到達するまでの加速時間を含む請求項4から6のいずれか一項に記載の車両制御装置。
【請求項9】
前記目標走行状態設定部は、前記減速地点の前方の前記目標速度を、前記減速地点の前方の道路の制限速度、前記速度指令値、及び前記減速地点の前方の道路曲率による制限速度の内の最も小さいものに設定する請求項1に記載の車両制御装置。
【請求項10】
前記車両制御部は、ドライバによるアクセルペダル操作、ブレーキペダル操作、又はハンドル操作が検出された場合は、操作内容に基づいて、前記目標速度に基づく制御量を変化させる、又は前記目標速度に基づく制御を終了する請求項1に記載の車両制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
この本願は、車両制御装置及び車両制御方法に関するものである。
続きを表示(約 2,900 文字)
【背景技術】
【0002】
従来より、自車両の前方に他車両が存在する場合は、自車両と他車両との間の車間距離を維持する制御を行い、自車両の前方に他車両が存在しない場合は、設定された速度指令値に従って定速走行する車両制御装置が実用化されている。さらに、高速道路のインターチェンジなどにおいて、減速すべきポイントで減速制御を行う技術も知られている。
【0003】
特許文献1の技術では、自車両が減速ノードに接近し、且つ、方向指示器の操作方向と減速ノードの方向とが一致している場合に、車間距離の制御が中断される。
【先行技術文献】
【特許文献】
【0004】
特許第3714014号
【発明の概要】
【発明が解決しようとする課題】
【0005】
従来の車両制御装置では、本線において、速度指令値より低い走行速度の他車両に追従している状況で、自車両のみ分流車線に移行した場合、他車両が追従対象から外れて自車両が速度指令値まで加速する。しかし、分流車線の先に減速地点が存在する場合は、条件によっては、加速後、直ぐに減速する場合があり、乗り心地が悪化する。一方、分流車線に移行した後、加速を行わないようにすると、減速地点までの分流車線の距離が長い場合、又は移行前の走行速度が低い場合は、減速地点までの走行時間が長くなり、乗り心地が悪化する。
【0006】
そこで、本願は、本線から分流車線に移行した後、前方に減速地点が存在する場合に、加速及び減速を適切に行って、減速地点までの走行の乗り心地を向上できる車両制御装置及び車両制御方法を提供することを目的とする。
【課題を解決するための手段】
【0007】
本願に係る車両制御装置は、
自車両の走行状態、前記自車両の周辺の道路情報、及び前記自車両の周辺の他車両の情報を取得する情報取得部と、
前記自車両の目標走行経路を設定する目標走行経路設定部と、
前記走行状態、前記目標走行経路、及び前記道路情報に基づいて、前記目標走行経路上において、前記自車両が走行すべき速度が前記自車両の現在の走行速度よりも小さくなる地点である減速地点を設定し、前記減速地点で走行すべき速度である減速地点速度を設定する減速地点設定部と、
前記目標走行経路上において、前記自車両の現在位置と前記減速地点との間に、前記自車両の減速を開始する地点である減速開始地点を設定する減速開始地点設定部と、
目標速度を設定する目標走行状態設定部と、
前記目標速度に基づいて、前記自車両を制御する車両制御部と、
を備え、
前記減速開始地点設定部は、前記目標走行経路上において、前記減速地点の手前に本線から分流する分流車線が存在する場合に、前記本線から前記分流車線への移行運転の開始地点の前方に前記減速開始地点を設定し、
前記目標走行状態設定部は、前記減速地点の手前に前記分流車線が存在する場合に、前記分流車線への移行運転の開始地点の手前では、速度指令値に基づいて前記自車両の目標速度を設定し、前記分流車線への移行運転の開始地点の前方では、前記速度指令値、前記自車両の現在の走行速度、前記分流車線への移行運転の開始地点から前記減速地点までの残り距離、及び前記減速地点速度に基づいて、前記目標速度を設定し、
前記自車両の前方の判定範囲内に前記他車両が存在する場合には、前記他車両の走行速度に応じて前記目標速度を補正するものである。
【0008】
本願に係る車両制御方法は、以下の各ステップを演算処理装置に実行させる車両制御方法であって、
自車両の走行状態、前記自車両の周辺の道路情報、及び前記自車両の周辺の他車両の情報を取得する情報取得ステップと、
前記自車両の目標走行経路を設定する目標走行経路設定ステップと、
前記走行状態、前記目標走行経路、及び前記道路情報に基づいて、前記目標走行経路上において、前記自車両が走行すべき速度が前記自車両の現在の走行速度よりも小さくなる地点である減速地点を設定し、前記減速地点で走行すべき速度である減速地点速度を設定する減速地点設定ステップと、
前記目標走行経路上において、前記自車両の現在位置と前記減速地点との間に、前記自車両の減速を開始する地点である減速開始地点を設定する減速開始地点設定ステップと、
目標速度を設定する目標走行状態設定ステップと、
前記目標速度に基づいて、前記自車両を制御する車両制御ステップと、
を備え、
前記減速開始地点設定ステップでは、前記目標走行経路上において、前記減速地点の手前に本線から分流する分流車線が存在する場合に、前記本線から前記分流車線への移行運転の開始地点の前方に前記減速開始地点を設定し、
前記目標走行状態設定ステップでは、前記減速地点の手前に前記分流車線が存在する場合に、前記分流車線への移行運転の開始地点の手前では、速度指令値に基づいて前記自車両の目標速度を設定し、前記分流車線への移行運転の開始地点の前方では、前記速度指令値、前記自車両の現在の走行速度、前記分流車線への移行運転の開始地点から前記減速地点までの残り距離、及び前記減速地点速度に基づいて、前記目標速度を設定し、
前記自車両の前方の判定範囲内に前記他車両が存在する場合には、前記他車両の走行速度に応じて前記目標速度を補正するものである。
【発明の効果】
【0009】
本願に係る車両制御装置及び車両制御方法によれば、本線において、速度指令値より低い走行速度の他車両に追従している状況で、自車両のみ分流車線に移行した場合であっても、速度指令値、分流車線への移行運転の開始地点の自車両の走行速度、分流車線への移行運転の開始地点から減速地点までの残り距離、及び減速地点速度に基づいて、目標速度を設定するので、分流車線の状態及び自車両の状態に応じて、加速及び減速を適切に行うことができ、減速地点までの走行の乗り心地を向上できる。
【図面の簡単な説明】
【0010】
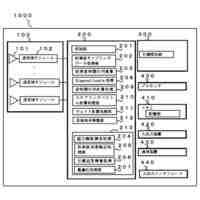
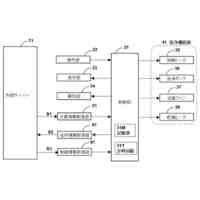
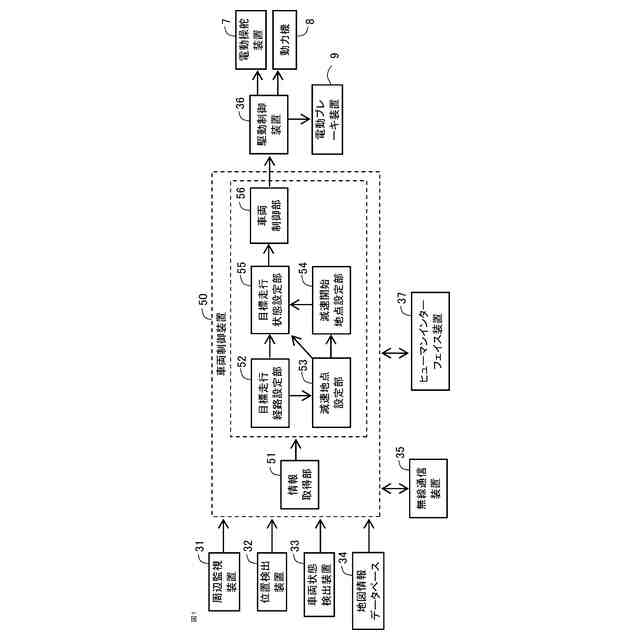
実施の形態1に係る車両制御装置及び車両制御システムの概略ブロック図である。
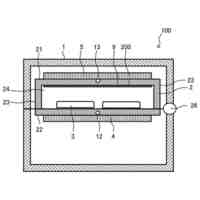
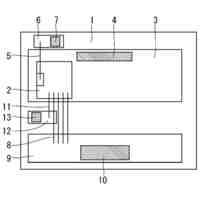
実施の形態1に係る車両制御装置の概略ハードウェア構成図である。
実施の形態1に係る車両制御装置の概略的な処理を説明するためのフローチャートである。
実施の形態1に係る予想走行時間が判定時間以上である場合の目標速度の設定を説明するための図である。
実施の形態1に係る予想走行時間が判定時間未満である場合の目標速度の設定を説明する図である。
実施の形態2に係る予想走行時間が判定時間未満である場合の目標速度の設定を説明する図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
三菱電機株式会社
炊飯器
1か月前
三菱電機株式会社
給湯機
1か月前
三菱電機株式会社
冷蔵庫
1か月前
三菱電機株式会社
清掃具
1か月前
三菱電機株式会社
換気扇
20日前
三菱電機株式会社
照明装置
1か月前
三菱電機株式会社
電機機器
14日前
三菱電機株式会社
端子構造
1か月前
三菱電機株式会社
換気装置
1か月前
三菱電機株式会社
照明器具
今日
三菱電機株式会社
照明器具
12日前
三菱電機株式会社
照明装置
1か月前
三菱電機株式会社
照明器具
21日前
三菱電機株式会社
加熱調理器
13日前
三菱電機株式会社
空気清浄機
26日前
三菱電機株式会社
加熱調理器
1か月前
三菱電機株式会社
空気清浄機
26日前
三菱電機株式会社
電気掃除機
1か月前
三菱電機株式会社
加熱調理器
1か月前
三菱電機株式会社
レーダ装置
13日前
三菱電機株式会社
半導体装置
1か月前
三菱電機株式会社
半導体装置
6日前
三菱電機株式会社
加熱調理器
1か月前
三菱電機株式会社
加熱調理器
21日前
三菱電機株式会社
空気清浄機
26日前
三菱電機株式会社
溝加工方法
19日前
三菱電機株式会社
電力変換器
1か月前
三菱電機株式会社
直流遮断器
1か月前
三菱電機株式会社
加熱調理器
1か月前
三菱電機株式会社
食器洗浄機
今日
三菱電機株式会社
半導体装置
20日前
三菱電機株式会社
電磁石装置
1か月前
三菱電機株式会社
半導体装置
1か月前
三菱電機株式会社
ホームドア
今日
三菱電機株式会社
空気清浄機
26日前
三菱電機株式会社
半導体装置
20日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ