TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024169855
公報種別
公開特許公報(A)
公開日
2024-12-06
出願番号
2023086670
出願日
2023-05-26
発明の名称
自律走行システム、自律走行方法、及び自律走行プログラム
出願人
シャープ株式会社
代理人
個人
,
個人
,
個人
主分類
G05D
1/43 20240101AFI20241129BHJP(制御;調整)
要約
【課題】マーカーの検出感度を向上させることにより走行装置の位置精度を向上させることが可能な自律走行システム、自律走行方法、及び自律走行プログラムを提供する。
【解決手段】自律走行システムは、走行エリアに配置されたマーカーを検出することにより走行装置を自律走行させる自律走行システムであって、前記走行装置と前記マーカーとの間の距離に基づいて前記マーカーの形状を変更させる変更処理部と、前記マーカーの形状を認識することにより前記走行装置の自己位置を推定して前記走行装置を自律走行させる走行処理部と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
走行エリアに配置されたマーカーを検出することにより走行装置を自律走行させる自律走行システムであって、
前記走行装置と前記マーカーとの間の距離に基づいて前記マーカーの形状を変更させる変更処理部と、
前記マーカーの形状を認識し、認識結果に基づいて前記走行装置を位置合わせして走行させる走行処理部と、
を備える自律走行システム。
続きを表示(約 1,300 文字)
【請求項2】
前記変更処理部は、
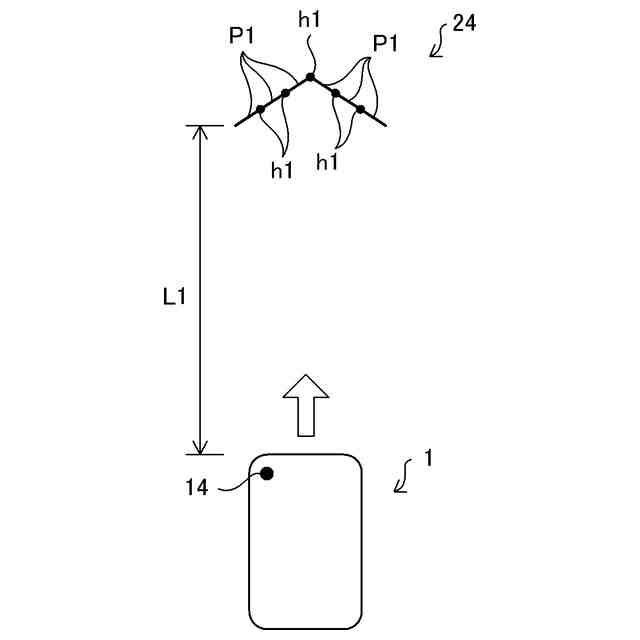
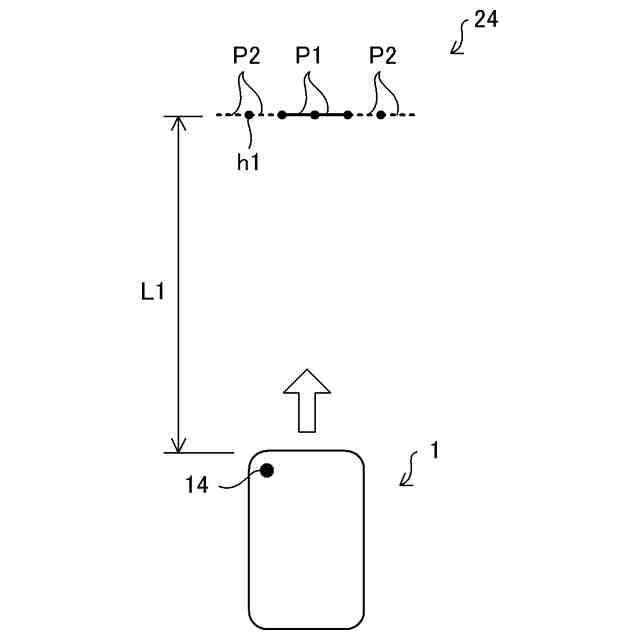
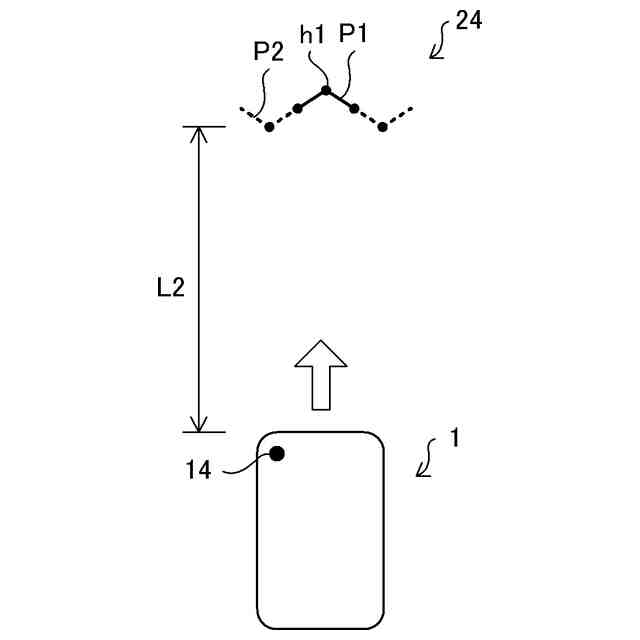
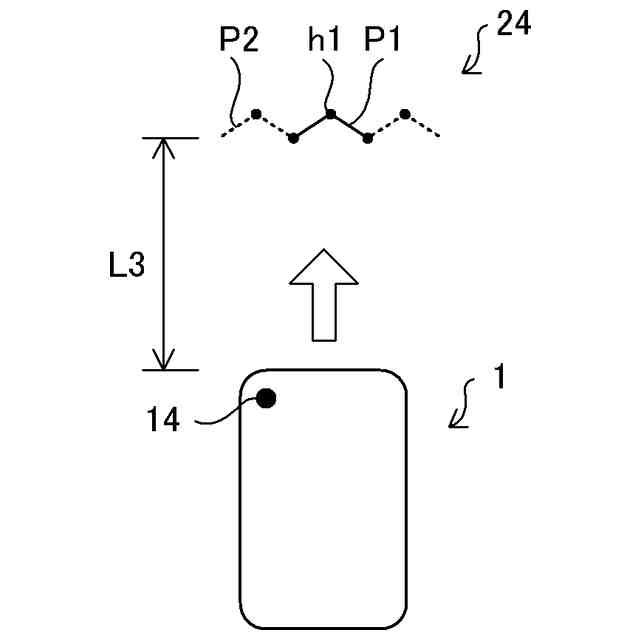
前記距離が所定距離よりも大きい場合に、前記距離が前記所定距離よりも小さい場合の前記マーカーよりも外形サイズが大きくなるように変形させ、
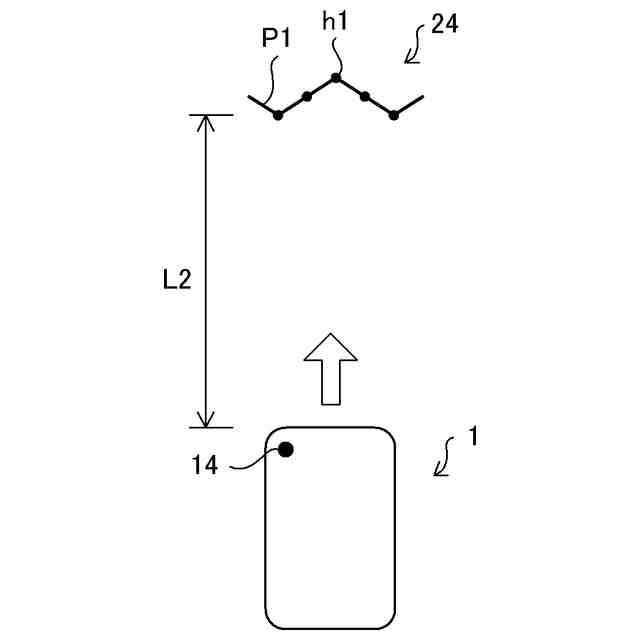
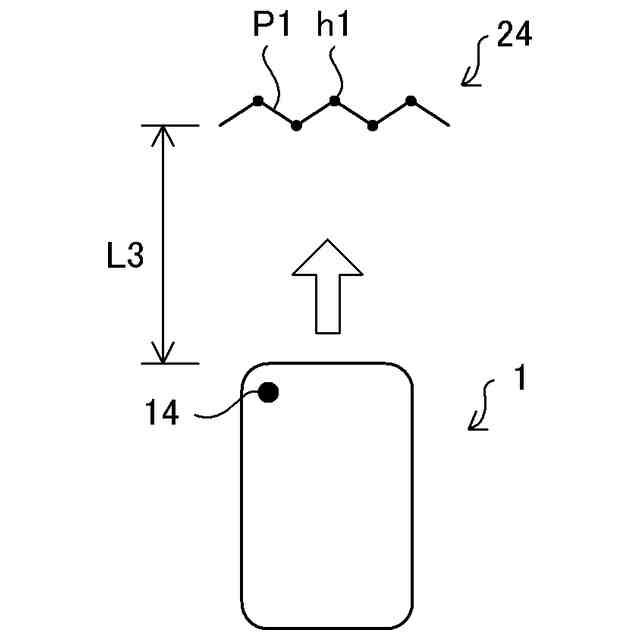
前記距離が前記所定距離よりも小さい場合に、前記距離が前記所定距離よりも大きい場合の前記マーカーよりも屈曲点が多くなるように変形させる、
請求項1に記載の自律走行システム。
【請求項3】
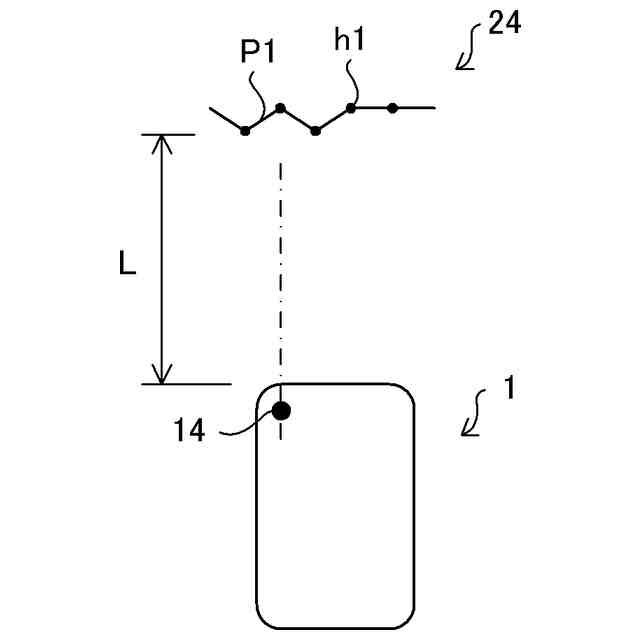
前記変更処理部は、前記距離が小さいほど前記屈曲点が多くなるように前記マーカーを変形させる、
請求項2に記載の自律走行システム。
【請求項4】
前記マーカーの一部は、反射板で構成される、
請求項1~3のいずれかに記載の自律走行システム。
【請求項5】
前記変更処理部は、前記走行装置と前記マーカーとの位置関係に応じて前記マーカーを回転させる、
請求項1~3のいずれかに記載の自律走行システム。
【請求項6】
前記変更処理部は、前記マーカーを駆動するマーカー制御部に含まれ、
前記マーカーには、前記走行装置と前記マーカーとの間の距離を測定する測定器が設けられており、
前記変更処理部は、前記測定器の測定結果に基づいて前記マーカーの形状を変更し、当該形状の情報を前記走行装置に送信し、
前記走行処理部は、前記形状の情報に基づいて前記走行装置を自律走行させる、
請求項1に記載の自律走行システム。
【請求項7】
前記マーカーが載置され、所定方向に移動可能な台車をさらに備え、
前記走行装置と前記マーカーとの位置関係に基づいて前記台車の移動量を算出し、前記移動量に基づいて前記台車を前記所定方向に移動させ、
前記走行処理部は、前記移動量に応じた経路に沿って前記走行装置を自律走行させる、
請求項1に記載の自律走行システム。
【請求項8】
前記マーカーが載置され、所定方向に移動可能な台車をさらに備え、
前記走行装置が前記マーカーを検出するまで継続して前記台車を前記所定方向に移動させ、
前記走行処理部は、前記台車の移動量に応じた経路に沿って前記走行装置を自律走行させる、
請求項1に記載の自律走行システム。
【請求項9】
走行エリアに配置されたマーカーを検出することにより走行装置を自律走行させる自律走行方法であって、
前記走行装置と前記マーカーとの間の距離に基づいて前記マーカーの形状を変更させることと、
前記マーカーの形状を認識し、認識結果に基づいて前記走行装置を位置合わせして走行させることと、
を一又は複数のプロセッサーが実行する自律走行方法。
【請求項10】
走行エリアに配置されたマーカーを検出することにより走行装置を自律走行させる自律走行プログラムであって、
前記走行装置と前記マーカーとの間の距離に基づいて前記マーカーの形状を変更させることと、
前記マーカーの形状を認識し、認識結果に基づいて前記走行装置を位置合わせして走行させることと、
を一又は複数のプロセッサーに実行させるための自律走行プログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、自律走行システム、自律走行方法、及び自律走行プログラムに関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
従来、自己位置を推定しながら予め設定された経路を走行する自律走行型の走行装置(自律走行ロボット、AGVなど)が知られている。例えば、予め定められた場所に反射板を配置し、反射板で反射されたレーザーを受信して反射板までの距離と反射板の角度とに基づいて自己位置を推定して経路を走行する走行装置が知られている(例えば特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2000-065571号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
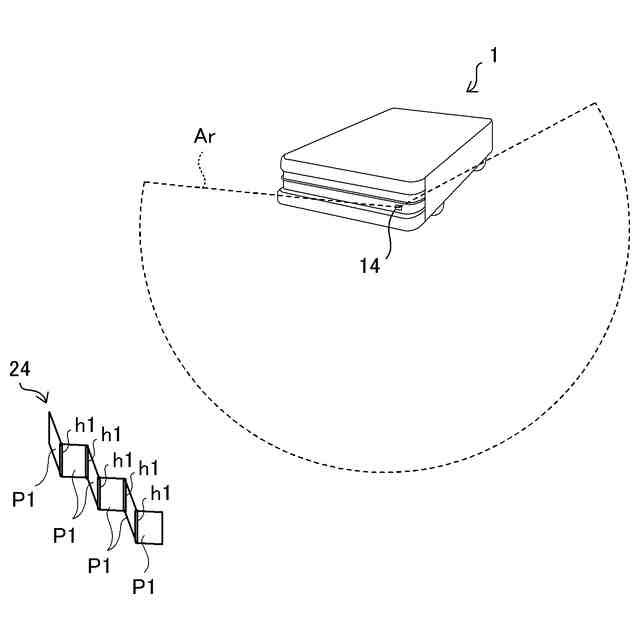
自律走行型の走行装置には、走行エリアに配置されたマーカーを検出しながら自律走行する走行装置がある。例えば、走行エリアの所定位置(停止位置など)にマーカーが配置されており、走行装置は、ライダーセンサーが当該マーカーを検出することにより所定位置に向かって移動することが可能になる。
【0005】
しかし、従来の技術では、例えば、走行装置がマーカーから離れた位置を走行している場合、マーカーの検出感度(検出性)が低下することによりマーカーを認識できない問題が生じる。また例えば、走行装置がマーカーに接近した場合、ライダーセンサーの検知可能範囲からマーカーの一部(端部)が外れることによりマーカーを認識できない問題が生じる。
【0006】
本開示の目的は、マーカーの検出感度を向上させることにより走行装置の位置精度を向上させることが可能な自律走行システム、自律走行方法、及び自律走行プログラムを提供することにある。
【課題を解決するための手段】
【0007】
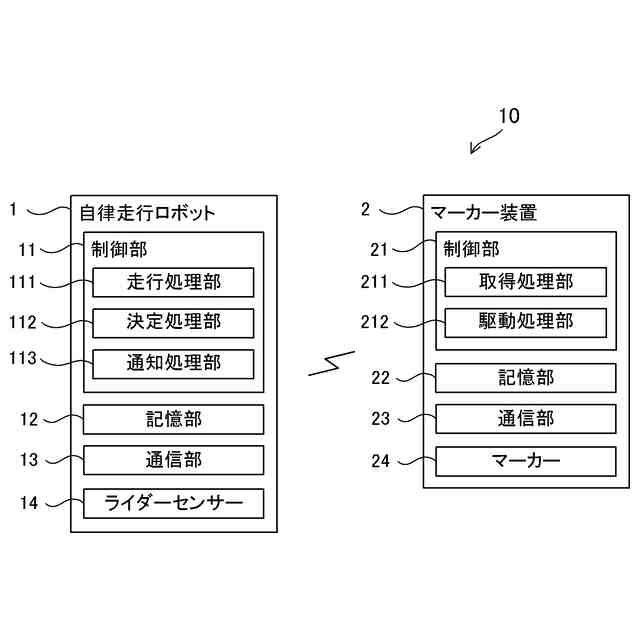
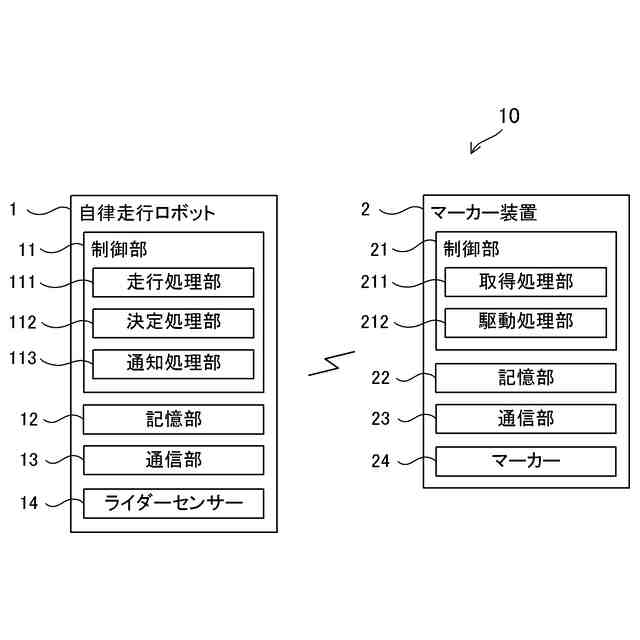
本開示の一の態様に係る自律走行システムは、走行エリアに配置されたマーカーを検出することにより走行装置を自律走行させる自律走行システムであって、変更処理部と走行処理部とを備える。前記変更処理部は、前記走行装置と前記マーカーとの間の距離に基づいて前記マーカーの形状を変更させる。前記走行処理部は、前記マーカーの形状を認識し、認識結果に基づいて前記走行装置を位置合わせして走行させる。
【0008】
本開示の他の態様に係る自律走行方法は、走行エリアに配置されたマーカーを検出することにより走行装置を自律走行させる自律走行方法であって、前記走行装置と前記マーカーとの間の距離に基づいて前記マーカーの形状を変更させることと、前記マーカーの形状を認識し、認識結果に基づいて前記走行装置を位置合わせして走行させることと、を一又は複数のプロセッサーが実行する方法である。
【0009】
本開示の他の態様に係る自律走行プログラムは、走行エリアに配置されたマーカーを検出することにより走行装置を自律走行させる自律走行プログラムであって、前記走行装置と前記マーカーとの間の距離に基づいて前記マーカーの形状を変更させることと、前記マーカーの形状を認識し、認識結果に基づいて前記走行装置を位置合わせして走行させることと、を一又は複数のプロセッサーに実行させるためのプログラムである。
【発明の効果】
【0010】
本開示によれば、マーカーの検出感度を向上させることにより走行装置の位置精度を向上させることが可能な自律走行システム、自律走行方法、及び自律走行プログラムを提供することができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
方向検出器
22日前
積水樹脂株式会社
磁性シート
1か月前
ugo株式会社
移動体
22日前
個人
車両レバー操作装置
1か月前
株式会社豊田自動織機
無人走行体
2か月前
エイブリック株式会社
基準電圧回路
2か月前
神港テクノス株式会社
制御装置
8日前
株式会社ダイヘン
移動体
8日前
株式会社ダイヘン
移動体
8日前
アズビル株式会社
設定システム
2か月前
トヨタ自動車株式会社
自律移動体
21日前
エイブリック株式会社
基準電圧回路装置
1か月前
トヨタ自動車株式会社
搬送システム
1か月前
株式会社熊谷組
巡回ルート作成装置
2か月前
トヨタ自動車株式会社
配送システム
1日前
オムロン株式会社
自律作業システム
2か月前
トヨタ自動車株式会社
搬送ロボット
1か月前
株式会社フジキン
流体制御装置
2日前
エイブリック株式会社
シャントレギュレータ
2か月前
株式会社ダイヘン
電力変換装置
2か月前
株式会社ダイヘン
電力変換装置
2か月前
トヨタ自動車株式会社
自律移動システム
21日前
株式会社ダイフク
搬送設備
14日前
トヨタ自動車株式会社
位置推定システム
21日前
トヨタ自動車株式会社
ロボットシステム
1か月前
エイブリック株式会社
ボルテージレギュレータ
2か月前
オムロン株式会社
設計装置および設計方法
2か月前
株式会社栗本鐵工所
操作装置
1か月前
株式会社FUJI
工作機械の操作システム
28日前
株式会社ダイフク
物品搬送設備
2か月前
東芝ライテック株式会社
管理システム
2か月前
ローム株式会社
電源回路
1日前
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイフク
物品搬送設備
8日前
株式会社FUJI
作業機の操作表示システム
2か月前
トヨタ自動車株式会社
群制御システム及び方法
7日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ