TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024168555
公報種別
公開特許公報(A)
公開日
2024-12-05
出願番号
2023085339
出願日
2023-05-24
発明の名称
作業支援システム、作業支援方法及び作業支援プログラム
出願人
株式会社大林組
代理人
個人
,
個人
主分類
E02F
9/26 20060101AFI20241128BHJP(水工;基礎;土砂の移送)
要約
【課題】建設機械を用いた作業を支援するための作業支援システム、作業支援方法及び作業支援プログラムを提供する。
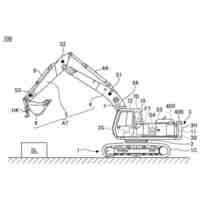
【解決手段】作業支援システムA1は、バケット10fを備えた建設機械10に接続された操作支援装置20を備える。そして、操作支援装置20は、建設機械10から作業領域を撮影した画像を取得し、バケット10fから作業領域までの距離を算出し、バケット10fが作業領域に当接する位置に、距離に応じたサイズのガイド画像を画像に重畳して出力する。
【選択図】図1
特許請求の範囲
【請求項1】
作業工具を備えた建設機械に接続された制御部を備えた作業支援システムであって、
前記制御部が、
前記建設機械から作業領域を撮影した画像を取得し、
前記作業工具から前記作業領域までの距離を算出し、
前記作業工具が前記作業領域に当接する位置に、前記距離に応じたサイズのガイド画像を前記画像に重畳して出力することを特徴とする作業支援システム。
続きを表示(約 440 文字)
【請求項2】
作業工具を備えた建設機械に接続された制御部を備えた作業支援システムを用いて、作業支援を行なう方法であって、
前記制御部が、
前記建設機械から作業領域を撮影した画像を取得し、
前記作業工具から前記作業領域までの距離を算出し、
前記作業工具が前記作業領域に当接する位置に、前記距離に応じたサイズのガイド画像を前記画像に重畳して出力することを特徴とする作業支援方法。
【請求項3】
作業工具を備えた建設機械に接続された制御部を備えた作業支援システムを用いて、作業支援を行なうプログラムであって、
前記制御部を、
前記建設機械から作業領域を撮影した画像を取得し、
前記作業工具から前記作業領域までの距離を算出し、
前記作業工具が前記作業領域に当接する位置に、前記距離に応じたサイズのガイド画像を前記画像に重畳して出力する手段として機能させることを特徴とする作業支援プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、建設機械を用いた作業を支援する作業支援システム、作業支援方法及び作業支援プログラムに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
建設機械を用いた作業を、遠隔操作により行なうことがある。この場合、建設機械のオペレータは、画面を見ながら操縦を行なう。建設機械の遠隔操作時は、カメラを用いて作業場の画像を取得するとともに、遠隔地で操作するオペレータ前のモニタに表示する。この場合、作業を支援するための情報をオペレータに提示する技術も検討されている(例えば、特許文献1参照。)。この文献に記載された技術では、撮像画像取得部は、作業機械に設けられたカメラから、作業機が写る撮像画像を取得する。刃先影生成部は、作業機の刃先を投影面に鉛直方向に向けて投影した刃先影を生成する。表示画像生成部は、撮像画像と、刃先影と、刃先の到達可能な範囲を投影面に鉛直方向に向けて投影した基準範囲図形とを重畳した表示画像を生成する。表示制御部は、表示画像を表示するための表示信号を出力する。
【先行技術文献】
【特許文献】
【0003】
特開2022-55808号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載された技術で、オペレータは基準範囲図形を確認できるが、刃先の3次元的な位置の認識が難しい。特に、遠隔操作に習熟したオペレータの確保が困難の場合、効率的な作業を実現することができない。
【課題を解決するための手段】
【0005】
上記課題を解決するための作業支援システムは、作業工具を備えた建設機械に接続された制御部を備える。そして、前記制御部が、前記建設機械から作業領域を撮影した画像を取得し、前記作業工具から前記作業領域までの距離を算出し、前記作業工具が前記作業領域に当接する位置に、前記距離に応じたサイズのガイド画像を前記画像に重畳して出力する。
【発明の効果】
【0006】
本開示によれば、建設機械を用いた作業を支援することができる。
【図面の簡単な説明】
【0007】
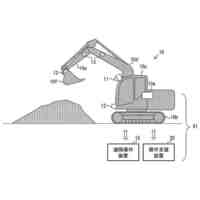
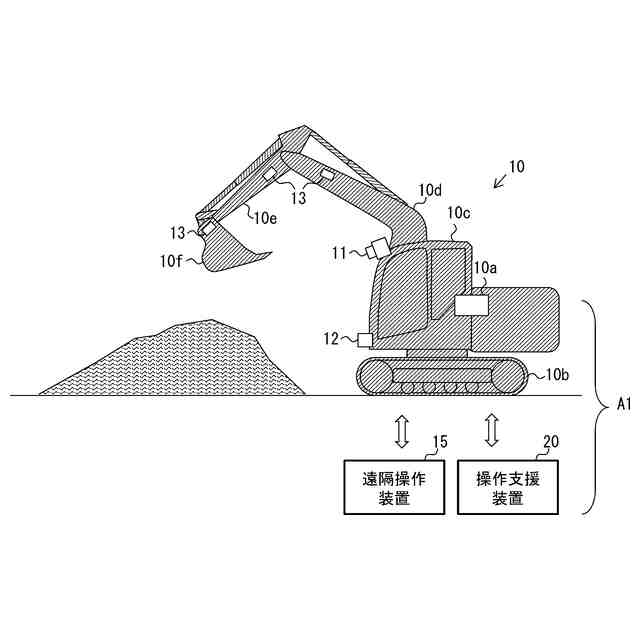
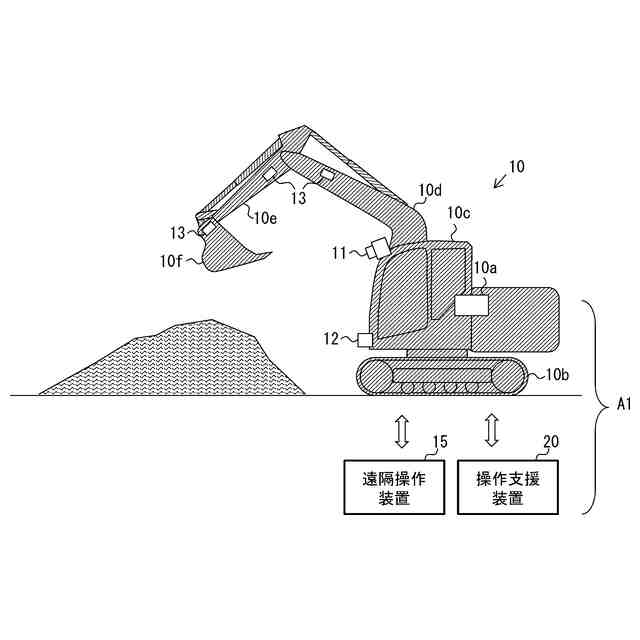
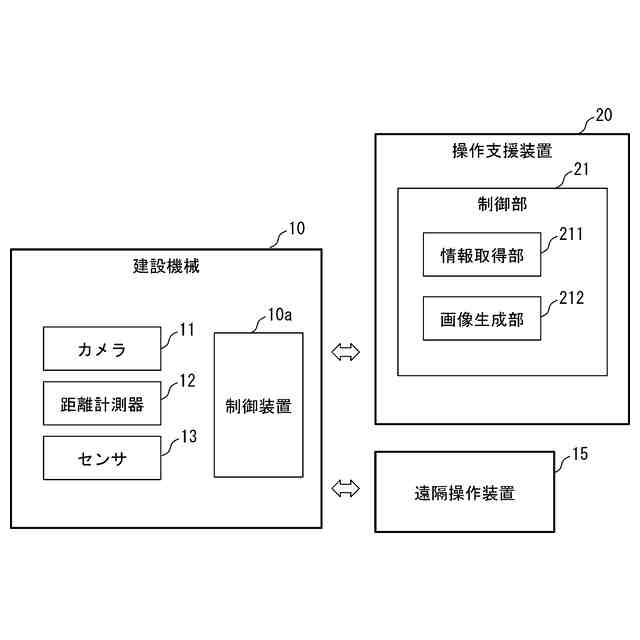
実施形態の作業支援システムの説明図である。
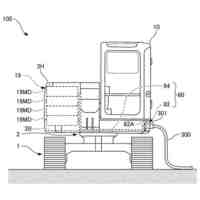
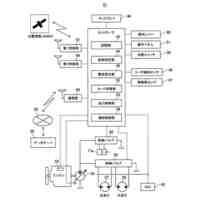
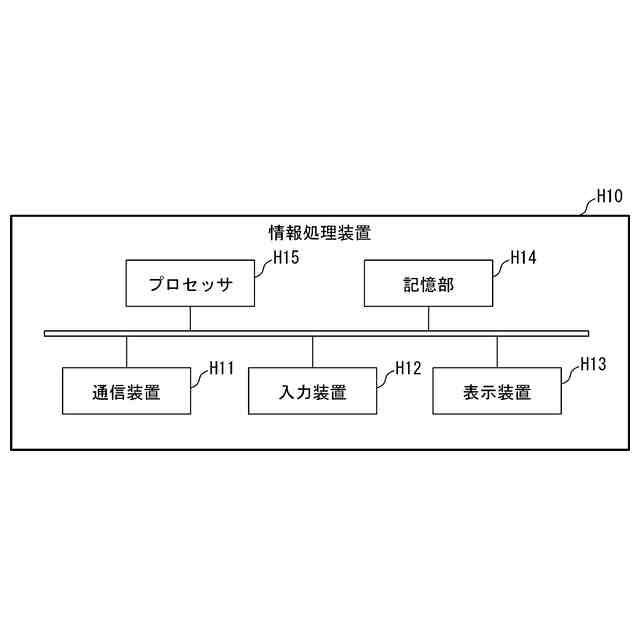
実施形態のハードウェア構成の説明図である。
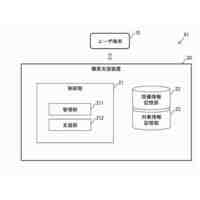
実施形態の作業支援システムの機能の説明図である。
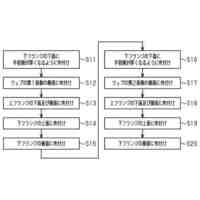
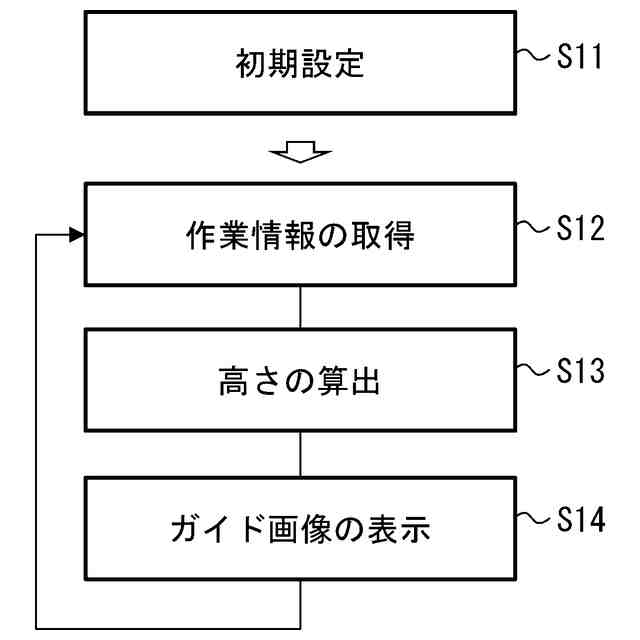
実施形態の処理手順の説明図である。
実施形態の処理手順の説明図である。
実施形態の処理手順の説明図である。
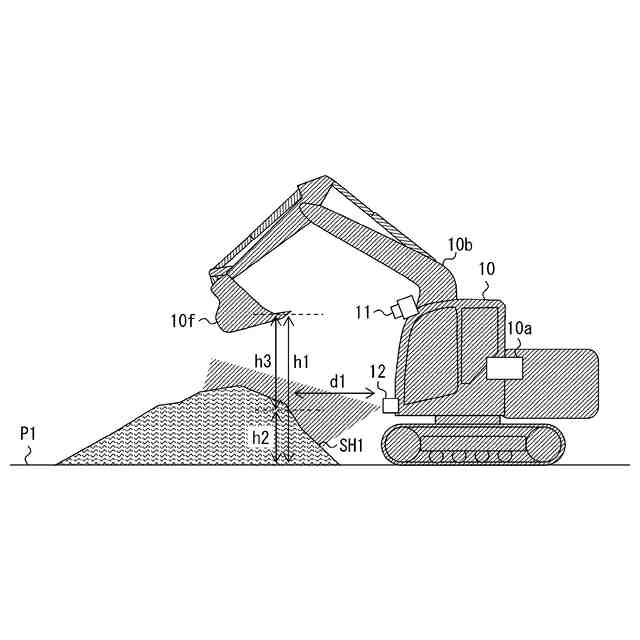
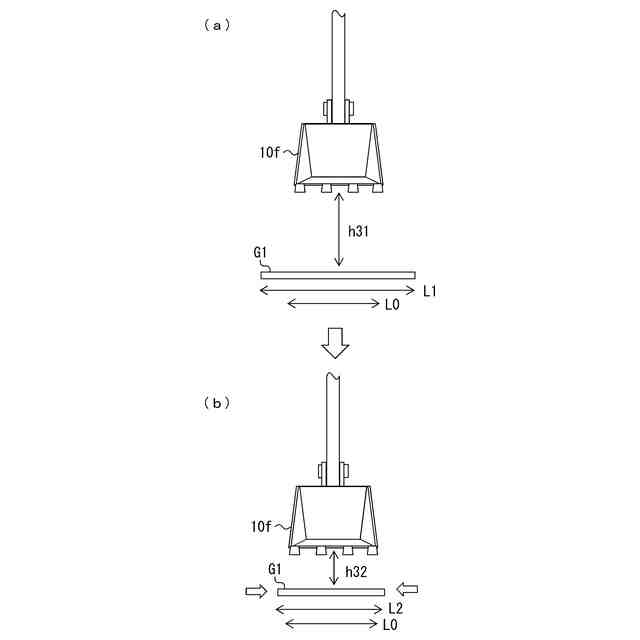
実施形態の処理手順の説明図であり、(a)はバケットが高い位置にある場合、(b)はバケットが低い位置にある場合の説明図。
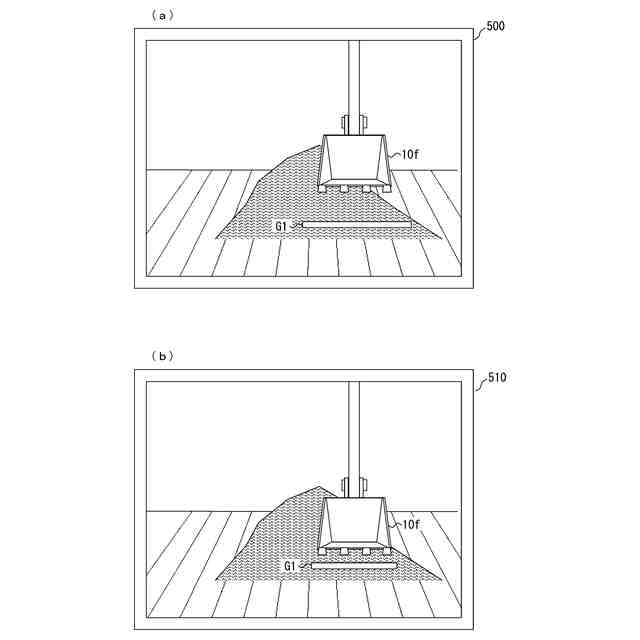
実施形態の表示画面の説明図であり、(a)はバケットが高い位置にある場合、(b)はバケットが低い位置にある場合の説明図。
【発明を実施するための形態】
【0008】
以下、図1~図8を用いて、作業支援システム、作業支援方法及び作業支援プログラムを具体化した一実施形態を説明する。
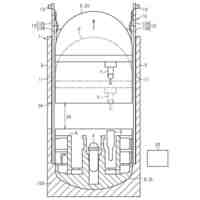
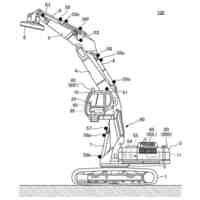
図1に示すように、作業支援システムA1は、建設機械10、遠隔操作装置15、操作支援装置20を用いる。本実施形態では、建設機械10としてバックホーを想定する。
【0009】
(建設機械の構成)
建設機械10は、制御装置10a、走行部10b、旋回部10c、ブーム10d、アーム10e、バケット10fを備える。ブーム10dの基端部は、旋回部10cにピン接合により取り付けられる。アーム10eの基端部は、ブーム10dの先端部にピン接合により取り付けられる。アーム10eの先端部には、バケット10fの基端部がピン接合により取り付けられる。これにより、アーム10eは、ブーム10dとバケット10fとを連結する。バケット10fは、作業工具として機能し、土砂などを掘削するための刃先と掘削した土砂を収容するための容器とを備える。
【0010】
制御装置10aは、オペレータによって入力された操作情報を遠隔操作装置15から取得し、走行部10b、旋回部10c、ブーム10d、アーム10e、バケット10fを制御する。ブーム10d、アーム10e、バケット10fは、油圧シリンダにより、姿勢を変更することができる。更に、制御装置10aは、ブーム10d、アーム10e、バケット10fの状態情報を取得し、操作支援装置20に送信する。
走行部10bは、無限軌道等により、建設機械10を走行移動させる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社大林組
鉄骨梁
14日前
株式会社大林組
鉄骨梁
14日前
株式会社大林組
外装構造
7日前
株式会社大林組
外装構造
7日前
株式会社大林組
外装構造
7日前
株式会社大林組
吹付け方法
1日前
株式会社大林組
吹付け方法
1日前
株式会社大林組
吹付け方法
1日前
株式会社大林組
耐震補強構造
1日前
株式会社大林組
鉄筋埋設構造及び方法
1日前
株式会社大林組
解体方法、及び、昇降装置
13日前
株式会社大林組
サンプリング装置及びサンプリング方法
14日前
株式会社大林組
構築支援装置、構築支援方法及び構築支援プログラム
1日前
株式会社大林組
作業支援システム、作業支援方法及び作業支援プログラム
7日前
株式会社大林組
生育支援システム、生育支援方法及び生育支援プログラム
7日前
株式会社大林組
太陽電池シートの支持構造及び太陽電池シートの設置方法
14日前
個人
エア津波緩衝装置
1日前
個人
砂防ダム及び導流堤
27日前
鹿島建設株式会社
接合構造
7日前
株式会社不二越
建設機械
7日前
住友建機株式会社
ショベル
1か月前
住友建機株式会社
ショベル
7日前
株式会社ナガイ製作所
貫入試験方法
22日前
コベルコ建機株式会社
作業機械
1日前
日本車輌製造株式会社
建設機械
21日前
住友重機械工業株式会社
作業機械
8日前
住友重機械工業株式会社
ショベル
1か月前
住友重機械工業株式会社
ショベル
1か月前
住友重機械工業株式会社
ショベル
1か月前
住友重機械工業株式会社
作業機械
1か月前
株式会社テクアノーツ
浮桟橋の係留装置
1か月前
株式会社フジタ
建築物とその施工方法
7日前
日本ソリッド株式会社
水中汚濁防止装置の展張方法
1か月前
コベルコ建機株式会社
電動式作業機械
1か月前
株式会社乗富鉄工所
水門開閉装置の設置方法
21日前
日本車輌製造株式会社
杭打機の制御装置
14日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ