TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024164404
公報種別
公開特許公報(A)
公開日
2024-11-27
出願番号
2023079852
出願日
2023-05-15
発明の名称
電動ポンプ装置、制御装置、および補正方法
出願人
NTN株式会社
代理人
弁理士法人深見特許事務所
主分類
H02P
6/08 20160101AFI20241120BHJP(電力の発電,変換,配電)
要約
【課題】マイコンの動作クロックを補正し正確な情報を上位コントローラへ送信する。
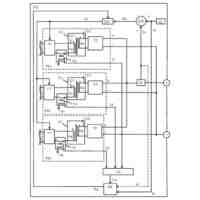
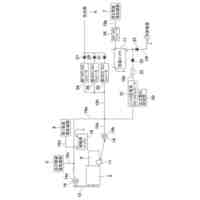
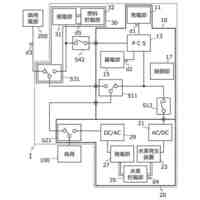
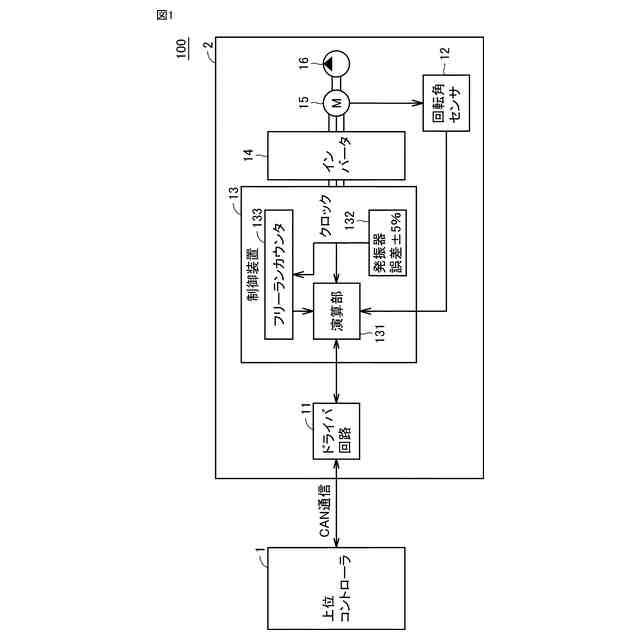
【解決手段】電動オイルポンプ16と、モータ15と、ドライバ回路11と、制御装置13と、を備える。制御装置13は、制御装置13の動作クロックを発生させるための発振器132と、上位コントローラ1からのCAN通信による通信情報を基に動作クロックの補正値を算出し、モータ15からの情報を補正値により補正し、ドライバ回路11へ送信する演算部131と、を含む。
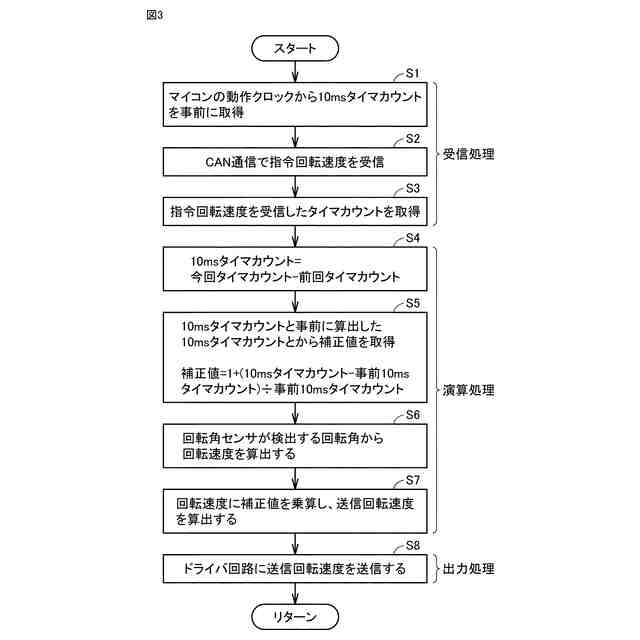
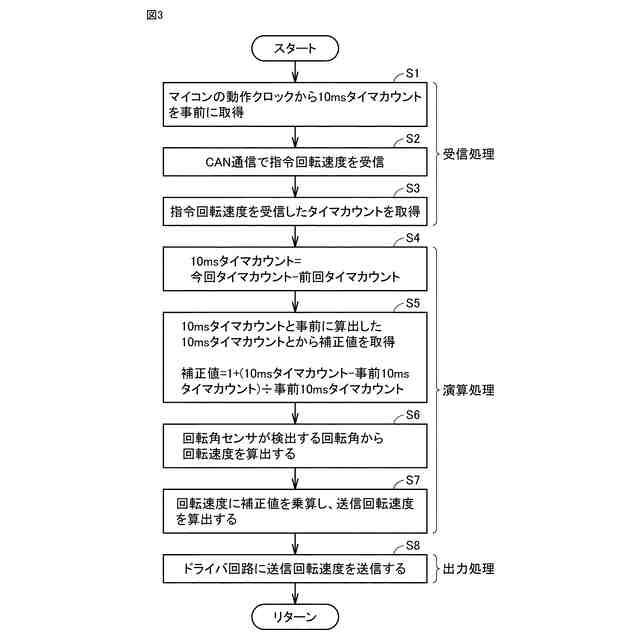
【選択図】図3
特許請求の範囲
【請求項1】
媒体を循環させるポンプと、
前記ポンプを駆動させるモータと、
上位コントローラとCAN(Controller Area Network)通信により信号を授受するためのドライバ回路と、
前記モータへ駆動信号を送信するとともに、前記モータからの情報を前記ドライバ回路へ送信する制御装置と、を備え、
前記制御装置は、
前記制御装置の動作クロックを発生させるための発振器と、
前記上位コントローラからのCAN通信による通信情報を基に前記動作クロックの補正値を算出し、前記モータからの情報を前記補正値により補正し、前記ドライバ回路へ送信する演算部と、を含む、電動ポンプ装置。
続きを表示(約 1,500 文字)
【請求項2】
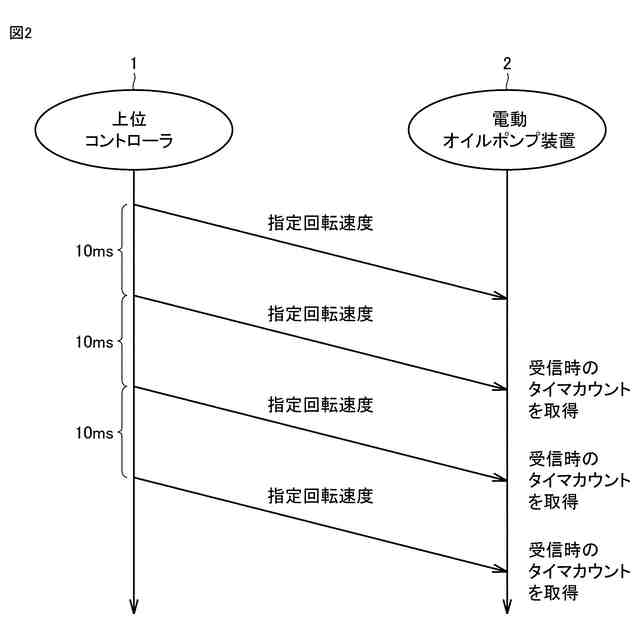
前記通信情報は、前記上位コントローラからCAN通信によって前記制御装置に定期的に送信される前記モータへの指令回転速度に関する情報であり、
前記演算部は、前記通信情報の通信間隔を基に前記補正値を算出する、請求項1に記載の電動ポンプ装置。
【請求項3】
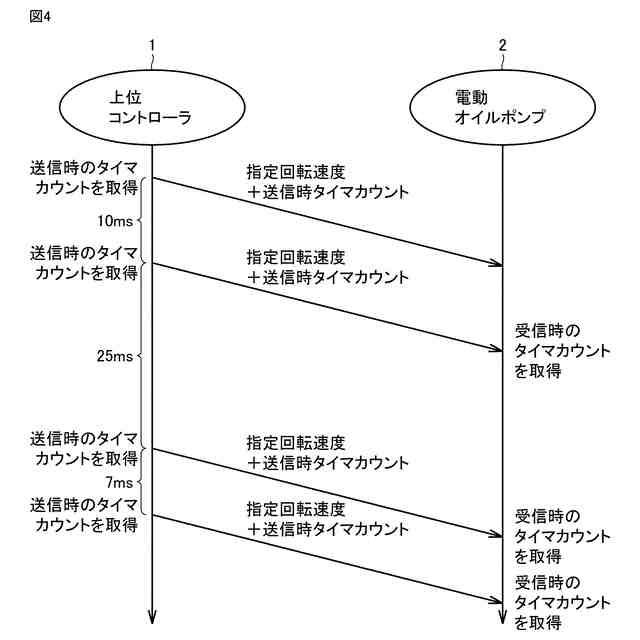
前記通信情報は、前記上位コントローラからCAN通信によって前記制御装置に不定期で送信される前記モータへの指令回転速度に関する情報と、送信時の時間に関する情報とを含み、
前記演算部は、前記送信時の時間に関する情報を基に前記補正値を算出する、請求項1に記載の電動ポンプ装置。
【請求項4】
前記動作クロックからカウント値を取得するフリーランカウンタをさらに備え、
前記演算部は、第1タイミングで前記通信情報を受信したときの前記フリーランカウンタにより取得した第1カウント値と、前記第1タイミングより前の第2タイミングで前記通信情報を受信したときの前記フリーランカウンタにより取得した第2カウント値との差から前記補正値を演算する、請求項1から請求項3のいずれか1項に記載の電動ポンプ装置。
【請求項5】
前記モータからの情報として前記モータの回転角を検出するセンサをさらに備え、
前記演算部は、前記モータの回転角から補正前の前記モータの回転速度を演算し、演算した前記モータの回転速度に前記補正値を乗算することにより前記モータの回転速度を補正する、請求項1から請求項3のいずれか1項に記載の電動ポンプ装置。
【請求項6】
前記演算部は、前記動作クロックから前記通信情報の通信間隔に対応する第3カウント値を事前に取得し、前記補正値を{1+(前記第1カウント値-前記第2カウント値)-前記第3カウント値}÷前記第3カウント値から算出する、請求項4に記載の電動ポンプ装置。
【請求項7】
前記演算部は、前記第1タイミングにおける前記上位コントローラからの前記送信時の時間に関する情報と、前記第2タイミングにおける前記上位コントローラからの前記送信時の時間に関する情報との差分に対応する第4カウント値を取得し、前記補正値を{1+(前記第1カウント値-前記第2カウント値)-前記第4カウント値}÷(前記第4カウント値)から算出する、請求項4に記載の電動ポンプ装置。
【請求項8】
モータと、上位コントローラとCAN通信により信号を授受するためのドライバ回路と、前記モータへ駆動信号を送信するとともに、前記モータからの情報を前記ドライバ回路へ送信する制御装置であって、
前記制御装置は、
前記制御装置の動作クロックを発生させるための発振器と、
前記上位コントローラからのCAN通信による通信情報を基に前記動作クロックの補正値を算出し、前記モータからの情報を前記補正値により補正し、前記ドライバ回路へ送信する演算部と、を含む、制御装置。
【請求項9】
モータと、上位コントローラとCAN通信により信号を授受するためのドライバ回路と、前記モータへ駆動信号を送信するとともに、前記モータからの情報を前記ドライバ回路へ送信する制御装置による補正方法であって、
前記補正方法は、
前記制御装置の動作クロックを取得するステップと、
前記上位コントローラからのCAN通信による通信情報を基に前記動作クロックの補正値を算出するステップと、
前記モータからの情報を前記補正値により補正するステップと、
補正された情報を前記ドライバ回路へ送信するステップと、を含む、補正方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、電動ポンプ装置、制御装置、および補正方法に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
従来、自動車には、電動モータによって駆動される電動オイルポンプ装置が搭載されているものがあった。この電動オイルポンプ装置には、例えば、特許第5275071号公報(特許文献1)に記載されているように、小型、長寿命の観点からブラシレスモータが採用されている。
【0003】
特許文献1の電動オイルポンプ装置は、ブラシレスモータを駆動するための制御信号として上位コントローラとパルス信号により通信し、故障情報を予めマップ化されたパルス信号の周波数に基づいて出力している。
【先行技術文献】
【特許文献】
【0004】
特許第5275071号
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1に記載された電動オイルポンプ装置では、上位コントローラと通信する際に、電動オイルポンプ装置に搭載されているマイコンであるMDU(Motor Drive Unit)の動作クロックの精度が悪い場合、電動オイルポンプの回転数が上位コントローラへ正確に伝わらないことがある。
【0006】
本開示は、上記の課題を解決するためになされたものであって、その目的は、マイコンの動作クロックを補正し正確な情報を上位コントローラへ送信することが可能な電動ポンプ装置、制御装置、および補正方法を提供することである。
【課題を解決するための手段】
【0007】
本開示の電動ポンプ装置は、媒体を循環させるポンプと、ポンプを駆動させるモータと、上位コントローラとCAN(Controller Area Network)通信により信号を授受するためのドライバ回路と、モータへ駆動信号を送信するとともに、モータからの情報を前記ドライバ回路へ送信する制御装置と、を備える。制御装置は、制御装置の動作クロックを発生させるための発振器と、上位コントローラからのCAN通信による通信情報を基に動作クロックの補正値を算出し、モータからの情報を補正値により補正し、ドライバ回路へ送信する演算部と、を含む。
【0008】
本開示の制御装置は、モータと、上位コントローラとCAN通信により信号を授受するためのドライバ回路と、モータへ駆動信号を送信するとともに、モータからの情報をドライバ回路へ送信する制御装置に関する。制御装置は、制御装置の動作クロックを発生させるための発振器と、上位コントローラからのCAN通信による通信情報を基に動作クロックの補正値を算出し、モータからの情報を補正値により補正し、ドライバ回路へ送信する演算部と、を含む。
【0009】
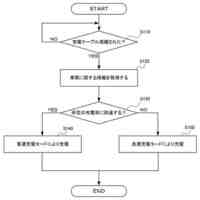
本開示の制御装置による補正方法は、モータと、上位コントローラとCAN通信により信号を授受するためのドライバ回路と、モータへ駆動信号を送信するとともに、モータからの情報をドライバ回路へ送信する方法に関する。方法は、制御装置の動作クロックを取得するステップと、上位コントローラからのCAN通信による通信情報を基に動作クロックの補正値を算出するステップと、モータからの情報を補正値により補正するステップと、補正された情報をドライバ回路へ送信するステップと、を含む。
【発明の効果】
【0010】
本開示によれば、上位コントローラからのCAN通信による通信情報を用いてマイコンの動作クロックを補正し正確な情報を上位コントローラへ送信することができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
NTN株式会社
軸受
1か月前
NTN株式会社
シェル形針状ころ軸受
1か月前
NTN株式会社
密封装置および転がり軸受
1か月前
NTN株式会社
電動ポンプ装置、制御装置、および補正方法
4日前
NTN株式会社
軸受装置
16日前
NTN株式会社
軸受用樹脂製保持器の強度評価方法および軸受用樹脂製保持器の強度評価用治具セット
2日前
個人
赤道周回変圧器
3日前
株式会社ダイヘン
電源装置
10日前
株式会社ダイヘン
電源装置
10日前
カヤバ株式会社
モータ
10日前
個人
ゼロカーボン発電循環装置
10日前
株式会社東光高岳
充電器
1か月前
西芝電機株式会社
回転電機
4日前
帝国繊維株式会社
作業用車両
1か月前
株式会社村田製作所
電源装置
1か月前
株式会社SUBARU
充電装置
1か月前
日置電機株式会社
電流制限回路
1か月前
株式会社村田製作所
電力変換装置
2日前
株式会社ダイヘン
電源装置
11日前
個人
架台及び架台システム
3日前
サンデン株式会社
モータ制御装置
1か月前
マツダ株式会社
モータ
4日前
マツダ株式会社
モータ
4日前
株式会社豊田自動織機
ロータ
3日前
株式会社辰巳菱機
電力供給システム
9日前
キヤノン電子株式会社
ステッピングモータ
23日前
本田技研工業株式会社
回転電機
1か月前
株式会社アイシン
巻線界磁型回転電機
1か月前
株式会社豊田自動織機
駆動装置
1か月前
株式会社ダイヘン
充電システム
25日前
株式会社ダイヘン
給電システム
11日前
富士電機株式会社
電力変換装置
24日前
株式会社サタケ
電動機の端子箱
1か月前
富士電機株式会社
電力変換装置
10日前
株式会社サタケ
制御盤の扉
10日前
株式会社豊田自動織機
誘導電動機
10日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ