TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024163227
公報種別
公開特許公報(A)
公開日
2024-11-21
出願番号
2024151434,2021503966
出願日
2024-09-03,2020-02-21
発明の名称
行動制御装置および行動制御方法
出願人
ソニーグループ株式会社
代理人
個人
,
個人
主分類
G05D
1/24 20240101AFI20241114BHJP(制御;調整)
要約
【課題】より適切な行動制御を実現する。
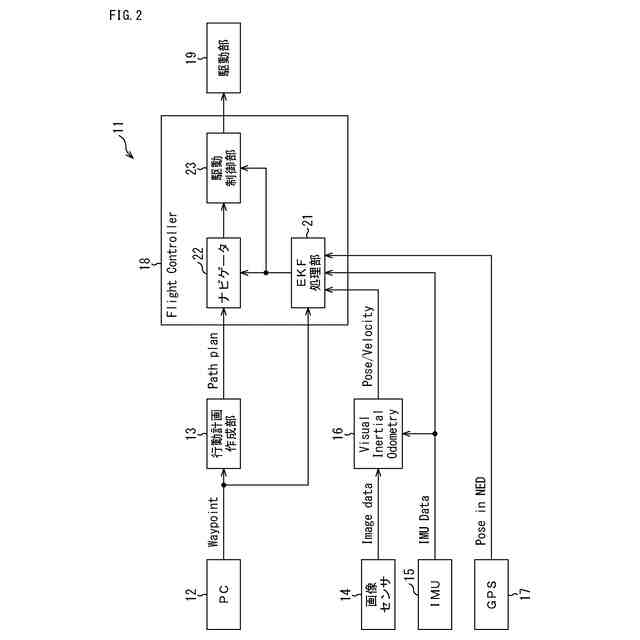
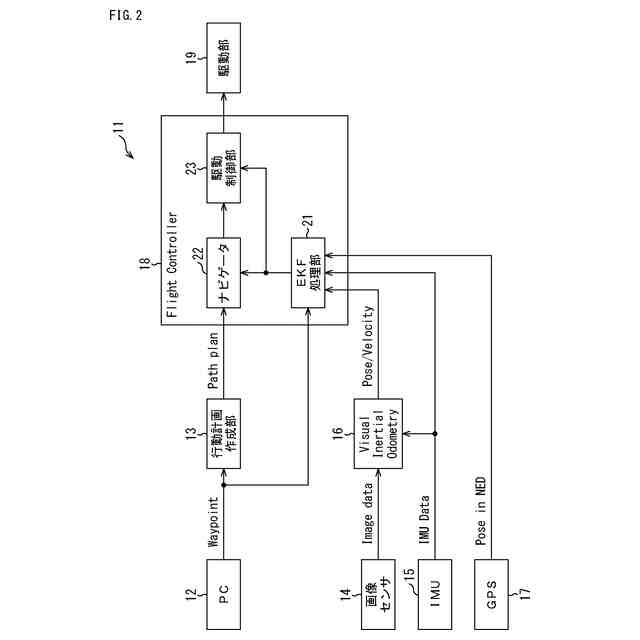
【解決手段】EKF処理部は、ドローンの位置を推定するのに使用する自己位置推定部を、推定精度の異なる複数の自己位置推定部の中からドローンが行動する際の指標となるウェイポイントに基づいて選択し、ドローンの状態を求める。そして、ナビゲータが、ドローンの状態に基づいて、予め作成された行動計画に従ってドローンの行動を制御する。本技術は、例えば、ドローンのミッション飛行を制御するミッション飛行制御装置に適用できる。
【選択図】図2
特許請求の範囲
【請求項1】
移動体の位置を推定するのに使用する自己位置推定部を、推定精度の異なる複数の前記自己位置推定部の中から指標に基づいて選択して、前記移動体の状態を求める状態特定部と、
前記移動体の状態に基づいて、指定された行動タスクによって作成された行動計画に従って前記移動体の行動を制御する行動制御部と
を備え、
前記自己位置推定部には、画像センサから取得した情報を利用するVisionベース自己位置推定部と、Lidar(Light Detection And Ranging)センサから取得した情報を利用するLidarベース自己位置推定部とを含む
行動制御装置。
続きを表示(約 1,800 文字)
【請求項2】
移動体の位置を推定するのに使用する自己位置推定部を、推定精度の異なる複数の前記自己位置推定部の中から指標に基づいて選択して、前記移動体の状態を求める状態特定部と、
前記移動体の状態に基づいて、指定された行動タスクによって作成された行動計画に従って前記移動体の行動を制御する行動制御部と、
前記状態特定部により選択される前記自己位置推定部を、前記指標ごとに指定する指標指定部と
を備え、
前記指標指定部は、所定の前記指標における前記移動体の自己位置を前記自己位置推定部が推定する際に優先させる優先事項に従って、所定の前記指標ごとの前記自己位置推定部を指定し、
前記指標指定部は、前記優先事項が移動速度である場合、前記自己位置推定部が有効に機能することが可能な速度の有効範囲の範囲内で、最も高速な移動速度を得られる前記自己位置推定部を指定する
行動制御装置。
【請求項3】
前記指標指定部は、所定の前記指標における前記移動体の自己位置を前記自己位置推定部が推定する際に優先させる優先事項に従って、所定の前記指標ごとの前記自己位置推定部を指定する
請求項2に記載の行動制御装置。
【請求項4】
前記指標指定部は、前記優先事項が推定精度である場合、前記自己位置推定部が有効に機能することが可能な速度の有効範囲の範囲内で、最も高い推定精度を得られる前記自己位置推定部を指定する
請求項3に記載の行動制御装置。
【請求項5】
前記指標は、前記画像センサ又は前記Lidarセンサから取得した情報である
請求項1から4のいずれかに記載の行動制御装置。
【請求項6】
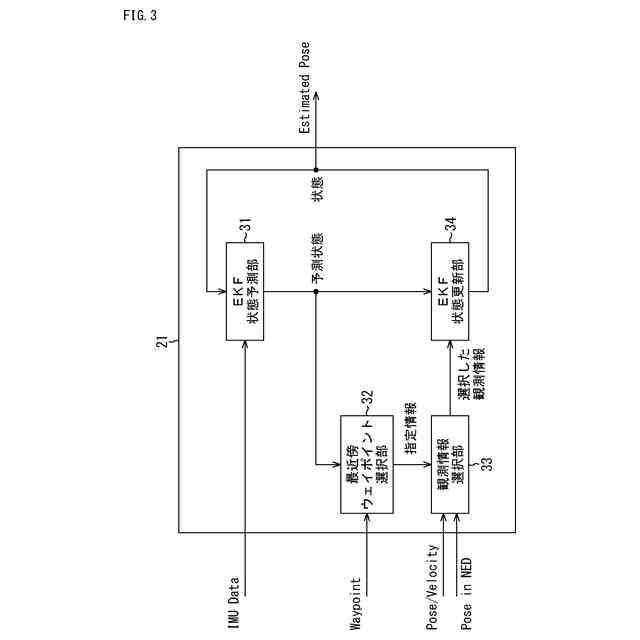
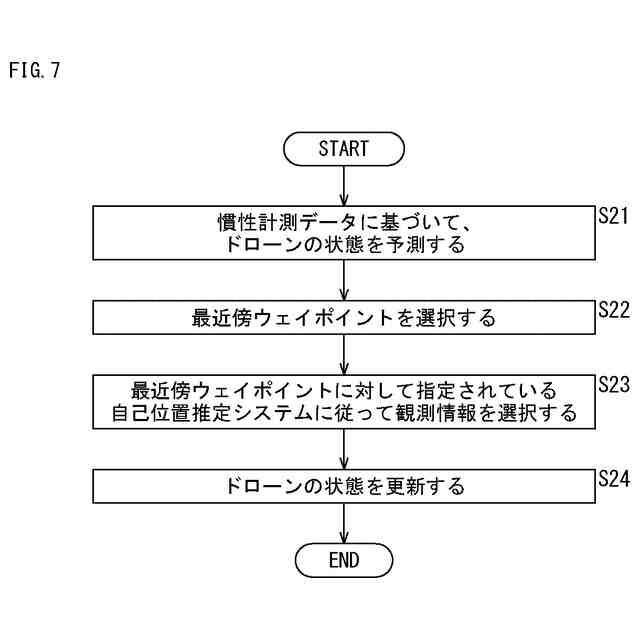
前記状態特定部は、
前記移動体が行動する際の指標のうち、前記移動体の行動に伴って最も近傍となる前記指標を選択する最近傍指標選択部と、
複数の前記自己位置推定部それぞれが前記移動体の位置を推定した結果として出力される複数の観測情報のうちの、前記最近傍指標選択部により選択された前記指標に基づいて指定されている前記自己位置推定部から出力される前記観測情報を選択する観測情報選択部と、
前記観測情報選択部により選択された前記観測情報に基づいて、前記移動体の最新の状態を求める状態更新部と
を有する
請求項1から5のいずれかに記載の行動制御装置。
【請求項7】
移動体の位置を推定するのに使用する自己位置推定部を、推定精度の異なる複数の前記自己位置推定部の中から指標に基づいて選択して、前記移動体の状態を求める状態特定部と、
前記移動体の状態に基づいて、指定された行動タスクによって作成された行動計画に従って前記移動体の行動を制御する行動制御部と、
前記状態特定部により選択される前記自己位置推定部を、前記指標ごとに指定する指標指定部と、
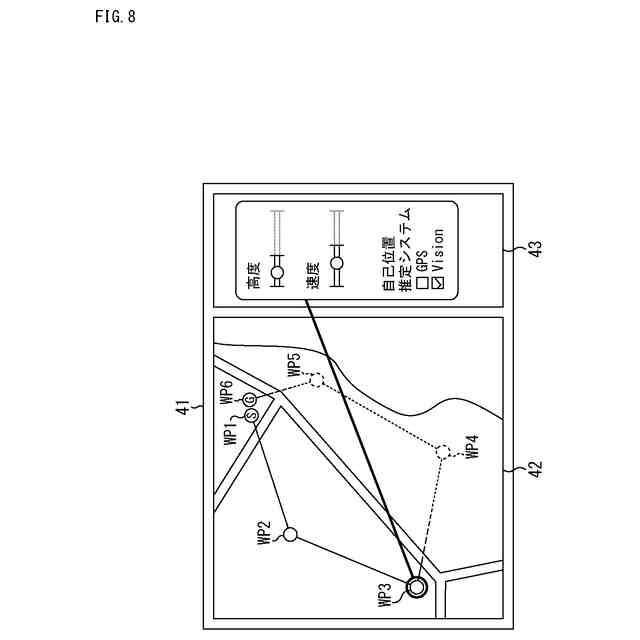
前記指標指定部により前記指標ごとに指定された前記自己位置推定部を視覚化するとともに、前記指標に従った経路ごとに使用される前記自己位置推定部を視覚化して表示する表示部と
を備え、
前記指標指定部では、前記行動タスクを指定するユーザによって、複数の前記指標が指定されるとともに、それぞれの前記指標ごとの前記自己位置推定部が指定される
行動制御装置。
【請求項8】
前記表示部は、所定の前記自己位置推定部が指定された前記指標に基づいて、その自己位置推定部が有効に機能することが可能な前記移動体の速度の有効範囲を表示し、前記有効範囲外について指定不可であることを視覚化して表示する
請求項7に記載の行動制御装置。
【請求項9】
前記表示部は、前記経路で使用される前記自己位置推定部の推定精度を、それぞれの経路に沿って視覚化して表示する
請求項7に記載の行動制御装置。
【請求項10】
前記表示部は、前記移動体の速度が指定されるのに応じて、その速度では有効に機能することができない前記自己位置推定部について指定不可であることを視覚化して表示する
請求項7に記載の行動制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、行動制御装置および行動制御方法に関し、特に、より適切な行動制御を実現することができるようにした行動制御装置および行動制御方法に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
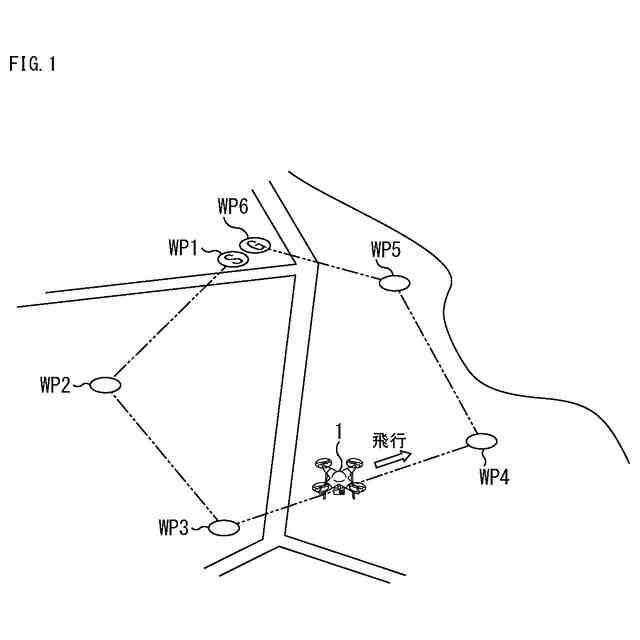
従来、いわゆるドローンと称される無人航空機(UAV:Unmanned Aerial Vehicle)などの移動体は、例えば、ユーザの操作に応じて飛行する他、予め指定されたウェイポイントを通過するというミッションに従って飛行すること(以下、ミッション飛行と称する)ができる。
【0003】
このようなミッション飛行を実現するには、ドローンが、自己の位置を推定するための自己位置推定システムを備える必要がある。例えば、自己位置推定システムには、GPS(Global Positioning System)センサを利用して自己の位置を推定する手法や、ビジョンセンサを利用して自己の位置を推定する手法などが主に用いられ、その他にも様々な手法を用いることができる。
【0004】
例えば、GPSセンサを利用した自己位置推定システムは、GPSを広範囲で利用することができるメリットがある一方で、自己位置を推定する精度が低い(例えば、数メートル程度の誤差)というデメリットがある。また、ビジョンセンサを利用した自己位置推定システムは、自己位置を推定する精度が高い(例えば、数センチ程度の誤差)というメリットがある一方で、ビジョンが有効に利用できる範囲が狭く、一様な見た目や遠景などにおいては利用することができないというデメリットがある。
【0005】
また、特許文献1には、複数の位置情報を取得して移動範囲の情報を設定することによって、移動する経路または範囲を、より正確に設定することが可能な移動体が開示されている。
【先行技術文献】
【特許文献】
【0006】
特許第6289750号
【発明の概要】
【発明が解決しようとする課題】
【0007】
ところで、従来のドローンでは、例えば、ミッション飛行の全体に亘って同一の自己位置推定システムを利用するように構成されていたため、自己位置を推定する際の推定精度を変えながら、状況に応じた適切な飛行制御を行うことは困難であった。例えば、あるウェイポイントでは高精度で自己位置を推定しながら飛行させたり、あるウェイポイントでは低精度であっても高速で飛行させたりするというようなミッション飛行を行うことが実現されていなかった。
【0008】
本開示は、このような状況に鑑みてなされたものであり、より適切な行動制御を実現することができるようにするものである。
【課題を解決するための手段】
【0009】
本開示の一側面の行動制御装置は、移動体の位置を推定するのに使用する自己位置推定部を、推定精度の異なる複数の前記自己位置推定部の中から指標に基づいて選択して、前記移動体の状態を求める状態特定部と、前記移動体の状態に基づいて、指定された行動タスクによって作成された行動計画に従って前記移動体の行動を制御する行動制御部とを備え、前記自己位置推定部には、画像センサから取得した情報を利用するVisionベース自己位置推定部と、Lidarセンサから取得した情報を利用するLidarベース自己位置推定部とを含む。
【0010】
本開示の一側面の行動制御方法は、移動体の行動を制御する行動制御装置が、前記移動体の位置を推定するのに使用する自己位置推定部を、推定精度の異なる複数の前記自己位置推定部の中から指標に基づいて選択して、前記移動体の状態を求めることと、前記移動体の状態に基づいて、指定された行動タスクによって作成された行動計画に従って前記移動体の行動を制御することとを含み、前記自己位置推定部には、画像センサから取得した情報を利用するVisionベース自己位置推定部と、Lidarセンサから取得した情報を利用するLidarベース自己位置推定部とを含む。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
方向検出器
3日前
積水樹脂株式会社
磁性シート
1か月前
ugo株式会社
移動体
3日前
個人
車両レバー操作装置
1か月前
株式会社豊田自動織機
無人走行体
1か月前
株式会社豊田自動織機
自動走行体
2か月前
エイブリック株式会社
基準電圧回路
1か月前
アズビル株式会社
設定システム
1か月前
トヨタ自動車株式会社
自律移動体
2日前
エイブリック株式会社
基準電圧回路装置
1か月前
トヨタ自動車株式会社
搬送システム
26日前
トヨタ自動車株式会社
搬送ロボット
16日前
オムロン株式会社
自律作業システム
1か月前
株式会社熊谷組
巡回ルート作成装置
1か月前
エイブリック株式会社
シャントレギュレータ
1か月前
株式会社ダイヘン
電力変換装置
1か月前
株式会社ダイヘン
電力変換装置
1か月前
トヨタ自動車株式会社
ロボットシステム
26日前
トヨタ自動車株式会社
自律移動システム
2日前
トヨタ自動車株式会社
位置推定システム
2日前
エイブリック株式会社
ボルテージレギュレータ
1か月前
株式会社栗本鐵工所
操作装置
17日前
株式会社FUJI
工作機械の操作システム
9日前
オムロン株式会社
設計装置および設計方法
1か月前
株式会社FUJI
作業機の操作表示システム
1か月前
株式会社フカデン
外周部加工システム
2か月前
株式会社ダイフク
物品搬送設備
26日前
東芝ライテック株式会社
管理システム
1か月前
株式会社デンソー
電子制御装置
2か月前
株式会社ダイフク
物品搬送設備
1か月前
アズビル株式会社
診断システムおよび診断方法
1か月前
株式会社豊田自動織機
無人走行体の走行制御システム
1か月前
株式会社栗本鐵工所
触覚提示装置
1か月前
CKD日機電装株式会社
モデルフリーポジカスト制御
16日前
株式会社デンソー
移動体制御装置
2か月前
トヨタ自動車株式会社
操作装置及び移動ロボット
24日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ


































