TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024162625
公報種別
公開特許公報(A)
公開日
2024-11-21
出願番号
2023078331
出願日
2023-05-11
発明の名称
回転体の運動を解析する方法、および回転体の運動を解析する方法を実行するためのコンピュータ用のプログラム
出願人
株式会社荏原製作所
,
国立大学法人東海国立大学機構
代理人
個人
,
個人
,
個人
,
個人
主分類
G01H
17/00 20060101AFI20241114BHJP(測定;試験)
要約
【課題】回転体に入力される外力を測定することなく、回転体の振れ回りを含む回転体の運動を解析することができる技術を提供する。
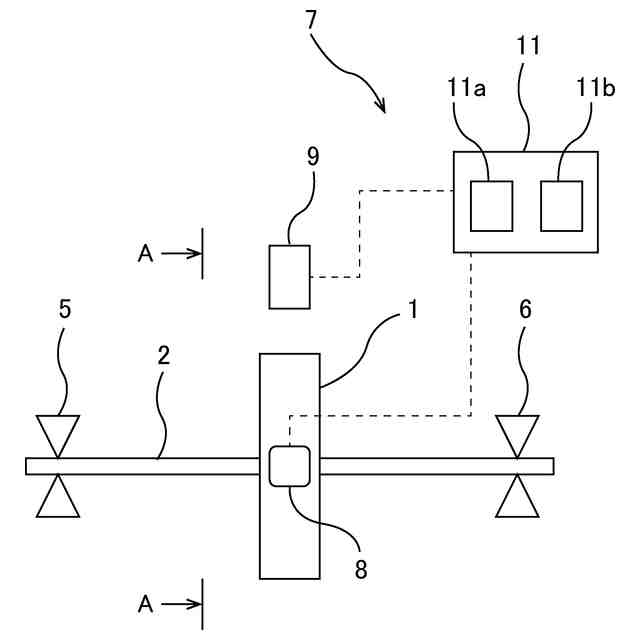
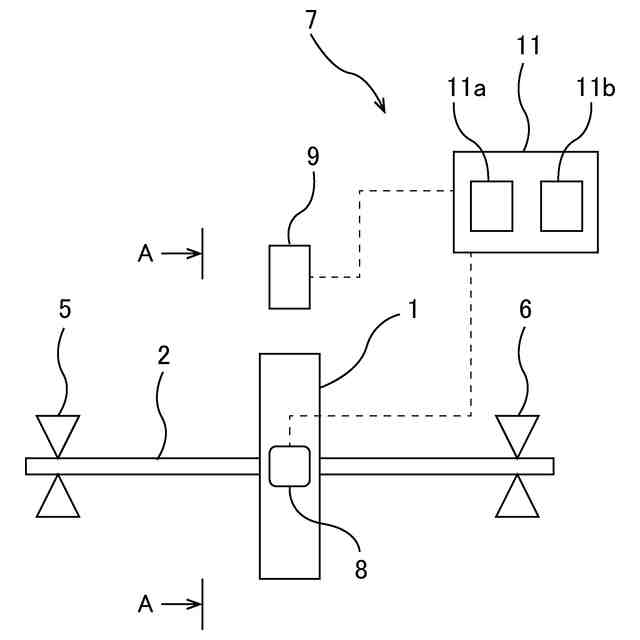
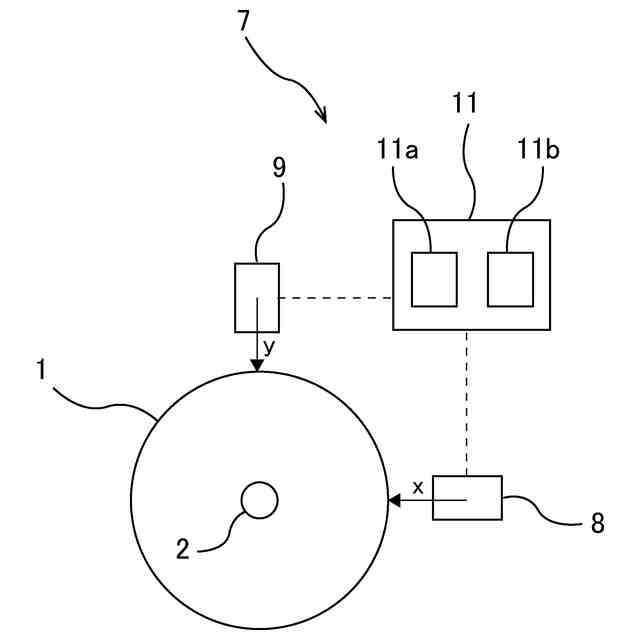
【解決手段】回転体1の運動を解析する方法は、回転体1のx方向の振動データと、回転体1のy方向の振動データを生成し、x方向の振動データからxx方向相互相関関数を作成し、x方向の振動データとy方向の振動データからxy方向相互相関関数を作成し、xx方向相互相関関数を実部、xy方向相互相関関数を虚部に持つ複素相互相関関数を作成し、複素相互相関関数をフーリエ変換して、複素関数で表される疑似周波数応答関数を決定する。
【選択図】図1
特許請求の範囲
【請求項1】
回転体の運動を解析する方法であって、
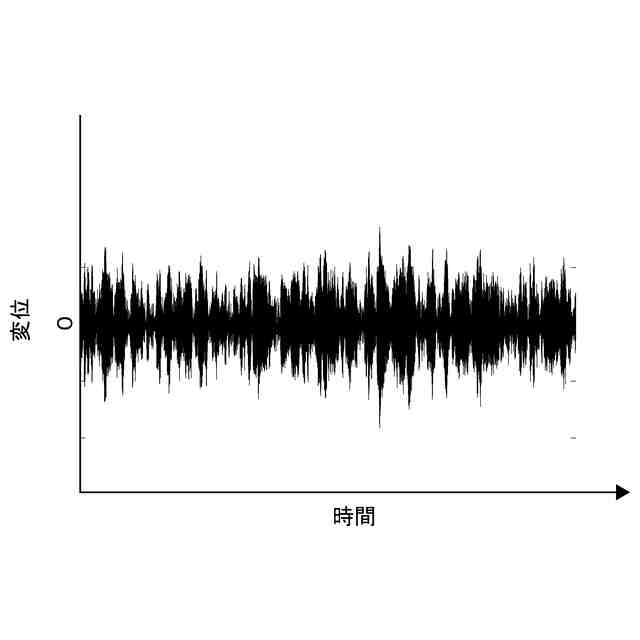
前記回転体のx方向の振動データと、前記回転体の、前記x方向とは異なるy方向の振動データを生成し、
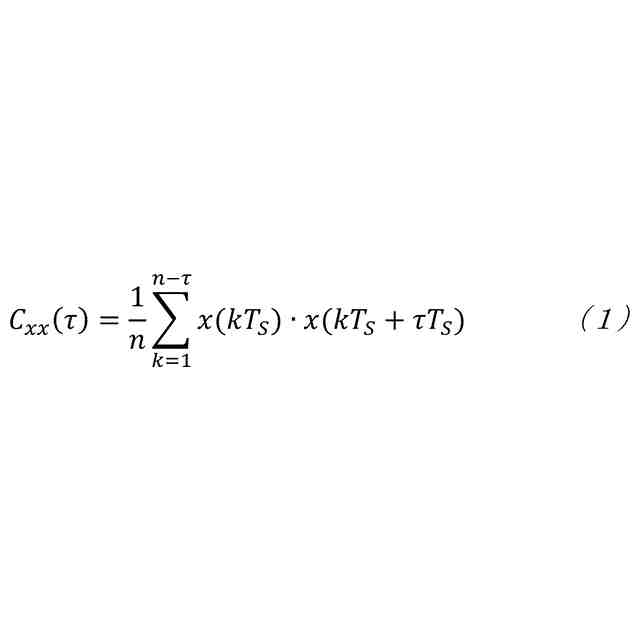
前記x方向の振動データからxx方向相互相関関数を作成し、
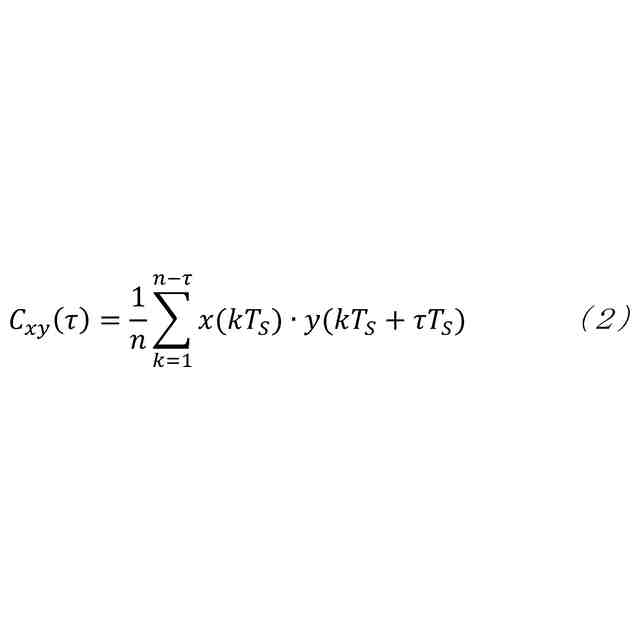
前記x方向の振動データと前記y方向の振動データからxy方向相互相関関数を作成し、
前記xx方向相互相関関数を実部、前記xy方向相互相関関数を虚部に持つ複素相互相関関数を作成し、
前記複素相互相関関数をフーリエ変換して、複素関数で表される疑似周波数応答関数を決定する、方法。
続きを表示(約 1,300 文字)
【請求項2】
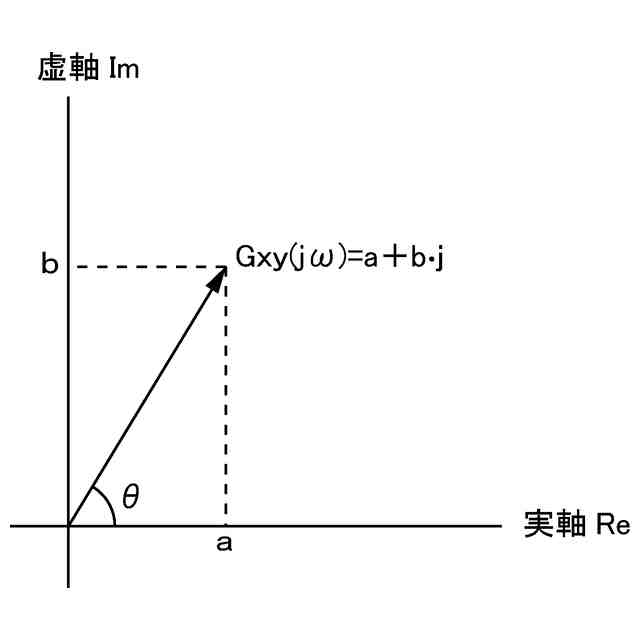
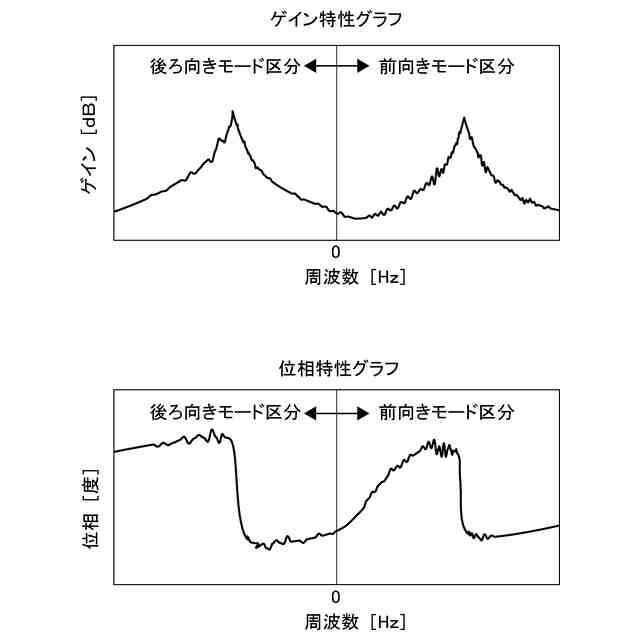
前記方法は、前記疑似周波数応答関数の絶対値と周波数との関係を示すゲイン特性グラフと、前記疑似周波数応答関数の偏角と周波数との関係を示す位相特性グラフを作成することをさらに含み、
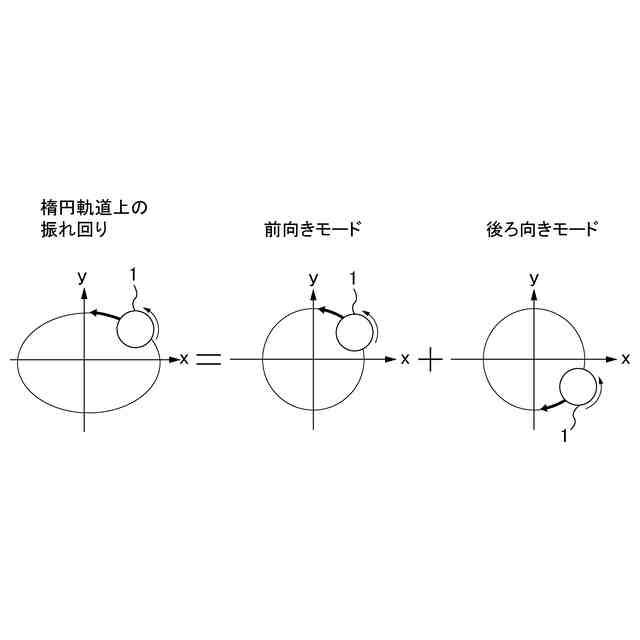
前記ゲイン特性グラフと前記位相特性グラフのそれぞれは、前記回転体の回転方向と同じ方向に前記回転体が振れ回りする前向きモードを示す前向きモード区分と、前記回転体の回転方向とは反対方向に前記回転体が振れ回りする後ろ向きモードを示す後ろ向きモード区分を含む、請求項1に記載の方法。
【請求項3】
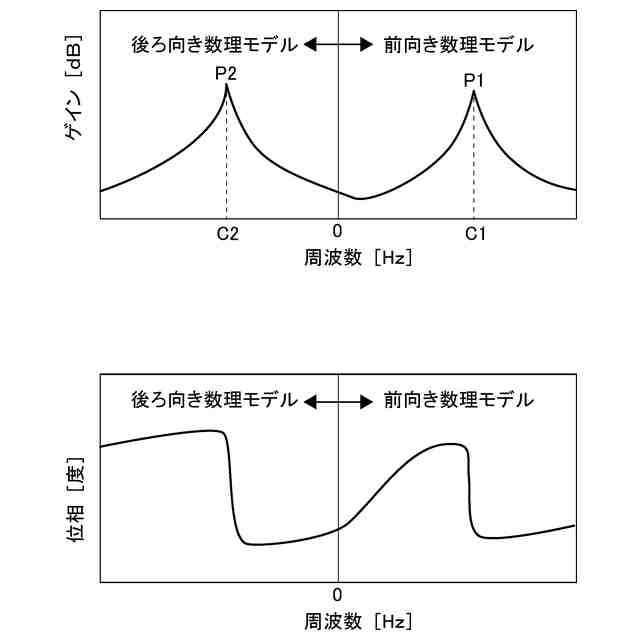
前記前向きモード区分にカーブフィッティングを実行することで、前記回転体の前記前向きモードを表す前向き数理モデルを決定し、
前記後ろ向きモード区分にカーブフィッティングを実行することで、前記回転体の前記後ろ向きモードを表す後ろ向き数理モデルを決定することをさらに含む、請求項2に記載の方法。
【請求項4】
前記回転体の固有振動数および減衰比を前記前向き数理モデルおよび前記後ろ向き数理モデルから決定することをさらに含む、請求項3に記載の方法。
【請求項5】
回転体のx方向の振動データと、前記回転体の、前記x方向とは異なるy方向の振動データを取得するステップと、
前記x方向の振動データからxx方向相互相関関数を作成するステップと、
前記x方向の振動データと前記y方向の振動データからxy方向相互相関関数を作成するステップと、
前記xx方向相互相関関数を実部、前記xy方向相互相関関数を虚部に持つ複素相互相関関数を作成するステップと、
前記複素相互相関関数をフーリエ変換して、複素関数で表される疑似周波数応答関数を決定するステップを、コンピュータに実行させるためのプログラム。
【請求項6】
前記プログラムは、前記疑似周波数応答関数の絶対値と周波数との関係を示すゲイン特性グラフと、前記疑似周波数応答関数の偏角と周波数との関係を示す位相特性グラフを作成するステップをコンピュータにさらに実行させるように構成され、
前記ゲイン特性グラフと前記位相特性グラフのそれぞれは、前記回転体の回転方向と同じ方向に前記回転体が振れ回りする前向きモードを示す前向きモード区分と、前記回転体の回転方向とは反対方向に前記回転体が振れ回りする後ろ向きモードを示す後ろ向きモード区分を含む、請求項5に記載のプログラム。
【請求項7】
前記前向きモード区分にカーブフィッティングを実行することで、前記回転体の前記前向きモードを表す前向き数理モデルを決定するステップと、
前記後ろ向きモード区分にカーブフィッティングを実行することで、前記回転体の前記後ろ向きモードを表す後ろ向き数理モデルを決定するステップをコンピュータにさらに実行させるように構成されている、請求項6に記載のプログラム。
【請求項8】
前記回転体の固有振動数および減衰比を前記前向き数理モデルおよび前記後ろ向き数理モデルから決定するステップをコンピュータにさらに実行させるように構成されている、請求項7に記載のプログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、羽根車などの回転体の運動を解析する技術に関し、特に回転体がその軸心を中心に回転しながら、回転体が振れ回るモードを解析する技術に関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
羽根車などの回転体の運動を解析することは、その回転体を含む回転機械を安全に運転する上で重要である。回転体は、その軸心を中心に回転するのがその典型的な運動の態様であるが、回転軸に支持された回転体は、その軸心を中心に回転しながら、回転体は楕円軌道を描いて振れ回る。したがって、回転体の運動を解析するためには、回転体の振れ回りを解析することが必要とされる。
【先行技術文献】
【非特許文献】
【0003】
「回転機械の力学」,山本敏男,石田幸男 著,2001年,コロナ社
【発明の概要】
【発明が解決しようとする課題】
【0004】
回転体の運動を解析する技術として、回転体に入力される外力と、その外力に対する回転体の応答との関係を表す周波数応答関数を算定する技術がある。周波数応答関数を用いることにより、外力に対する回転体の応答の特性を評価することが可能である。しかしながら、この周波数応答関数を算定するためには、回転体に入力される外力を測定する必要がある。外力の測定は、回転機械の構造によっては困難であり、周波数応答関数を用いた従来の技術は、汎用性が低いという問題があった。
【0005】
そこで、本発明は、回転体に入力される外力を測定することなく、回転体の振れ回りを含む回転体の運動を解析することができる技術を提供する。
【課題を解決するための手段】
【0006】
一態様では、回転体の運動を解析する方法であって、前記回転体のx方向の振動データと、前記回転体の、前記x方向とは異なるy方向の振動データを生成し、前記x方向の振動データからxx方向相互相関関数を作成し、前記x方向の振動データと前記y方向の振動データからxy方向相互相関関数を作成し、前記xx方向相互相関関数を実部、前記xy方向相互相関関数を虚部に持つ複素相互相関関数を作成し、前記複素相互相関関数をフーリエ変換して、複素関数で表される疑似周波数応答関数を決定する、方法が提供される。
【0007】
一態様では、前記方法は、前記疑似周波数応答関数の絶対値と周波数との関係を示すゲイン特性グラフと、前記疑似周波数応答関数の偏角と周波数との関係を示す位相特性グラフを作成することをさらに含み、前記ゲイン特性グラフと前記位相特性グラフのそれぞれは、前記回転体の回転方向と同じ方向に前記回転体が振れ回りする前向きモードを示す前向きモード区分と、前記回転体の回転方向とは反対方向に前記回転体が振れ回りする後ろ向きモードを示す後ろ向きモード区分を含む。
一態様では、前記方法は、前記前向きモード区分にカーブフィッティングを実行することで、前記回転体の前記前向きモードを表す前向き数理モデルを決定し、前記後ろ向きモード区分にカーブフィッティングを実行することで、前記回転体の前記後ろ向きモードを表す後ろ向き数理モデルを決定することをさらに含む。
一態様では、前記方法は、前記回転体の固有振動数および減衰比を前記前向き数理モデルおよび前記後ろ向き数理モデルから決定することをさらに含む。
【0008】
一態様では、回転体のx方向の振動データと、前記回転体の、前記x方向とは異なるy方向の振動データを取得するステップと、前記x方向の振動データからxx方向相互相関関数を作成するステップと、前記x方向の振動データと前記y方向の振動データからxy方向相互相関関数を作成するステップと、前記xx方向相互相関関数を実部、前記xy方向相互相関関数を虚部に持つ複素相互相関関数を作成するステップと、前記複素相互相関関数をフーリエ変換して、複素関数で表される疑似周波数応答関数を決定するステップを、コンピュータに実行させるためのプログラムが提供される。
【0009】
一態様では、前記プログラムは、前記疑似周波数応答関数の絶対値と周波数との関係を示すゲイン特性グラフと、前記疑似周波数応答関数の偏角と周波数との関係を示す位相特性グラフを作成するステップをコンピュータにさらに実行させるように構成され、前記ゲイン特性グラフと前記位相特性グラフのそれぞれは、前記回転体の回転方向と同じ方向に前記回転体が振れ回りする前向きモードを示す前向きモード区分と、前記回転体の回転方向とは反対方向に前記回転体が振れ回りする後ろ向きモードを示す後ろ向きモード区分を含む。
一態様では、前記プログラムは、前記前向きモード区分にカーブフィッティングを実行することで、前記回転体の前記前向きモードを表す前向き数理モデルを決定するステップと、前記後ろ向きモード区分にカーブフィッティングを実行することで、前記回転体の前記後ろ向きモードを表す後ろ向き数理モデルを決定するステップをコンピュータにさらに実行させるように構成されている。
一態様では、前記プログラムは、前記回転体の固有振動数および減衰比を前記前向き数理モデルおよび前記後ろ向き数理モデルから決定するステップをコンピュータにさらに実行させるように構成されている。
【発明の効果】
【0010】
xx方向相互相関関数にxy方向相互相関関数を組み合わせることで得られる複素相互相関関数は、回転体のx方向およびy方向の位置情報のみならず、回転体の前向きモードおよび後ろ向きモードの両方の情報を含む。したがって、xx方向相互相関関数にxy方向相互相関関数を組み合わせた複素相互相関関数から得られる疑似周波数応答関数に基づいて、回転体の前向きモードの特性および後ろ向きモードの特性の両方を別々に推定することができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
他の特許を見る
 特許ウォッチ
特許ウォッチ