TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024155619
公報種別
公開特許公報(A)
公開日
2024-10-31
出願番号
2023070482
出願日
2023-04-21
発明の名称
制御装置、及び制御プログラム
出願人
株式会社デンソー
代理人
弁理士法人太陽国際特許事務所
主分類
G08G
1/09 20060101AFI20241024BHJP(信号)
要約
【課題】車両の支援効率を向上させる。
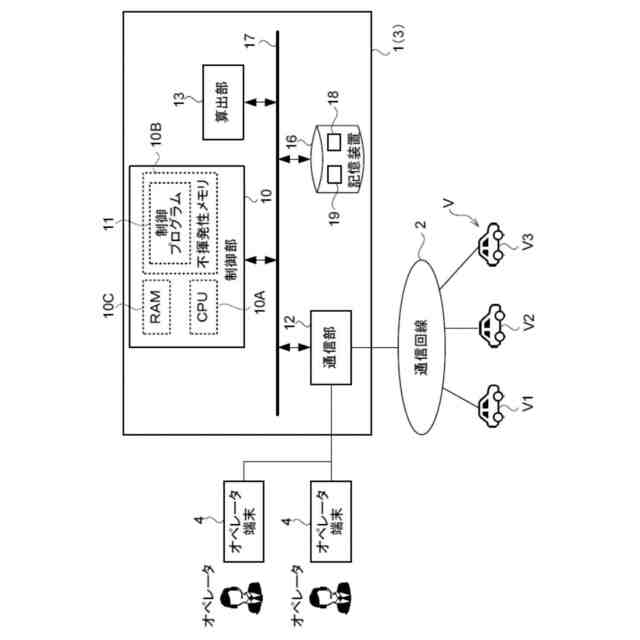
【解決手段】制御装置1は、通信回線2を通じて接続された車両V1に対する遠隔支援中に、通信回線を通じて接続された車両V2から遠隔支援要求を受け付けた場合、車両V1及び車両V2の各々における、遠隔支援の内容に応じて予め定めた目標支援時間T
A
と遠隔支援に要する予測支援時間を用いて、車両V1に対する遠隔支援を中断して車両V2に対する遠隔支援を開始する割り込み制御を行うか否かを判定し、車両V1及び車両V2に対する遠隔支援を行う。
【選択図】図1
特許請求の範囲
【請求項1】
通信回線(2)を通じて接続された第1車両(V1)に対する遠隔支援中に、前記通信回線を通じて接続された第2車両(V2、V3)から遠隔支援要求を受け付けた場合、
前記第1車両及び前記第2車両の各々における、遠隔支援の内容に応じて予め定めた目標支援時間(T
A
)と遠隔支援に要する予測支援時間を用いて、前記第1車両に対する遠隔支援を中断して前記第2車両に対する遠隔支援を開始する割り込み制御を行うか否かを判定し、前記割り込み制御を行うか否かの判定結果に応じた態様で前記第1車両及び前記第2車両に対する遠隔支援を行う制御部(10)、
を備えた制御装置(1)。
続きを表示(約 1,600 文字)
【請求項2】
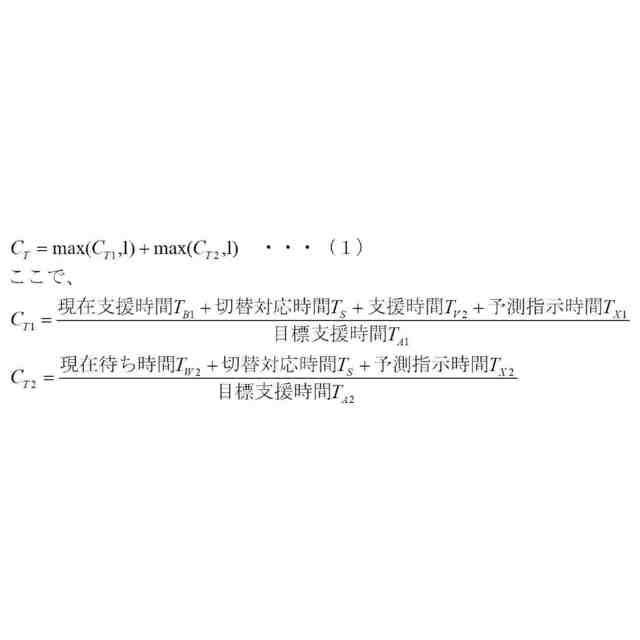
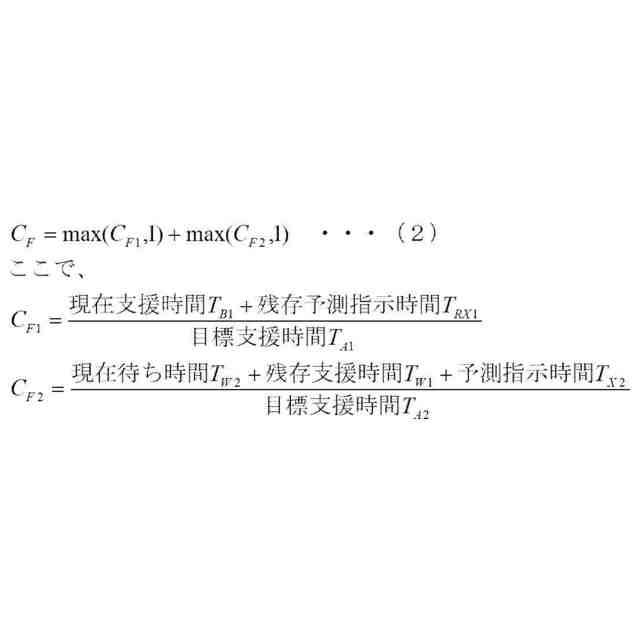
前記割り込み制御を行った場合と、前記割り込み制御を行うことなく、前記第1車両に対する遠隔支援の終了後に前記第2車両に対する遠隔支援を開始した場合とについて、前記第1車両及び前記第2車両の各々における、前記目標支援時間に対する前記予測支援時間の割合から得られる値によって表される評価値を算出する算出部(13)を備え、
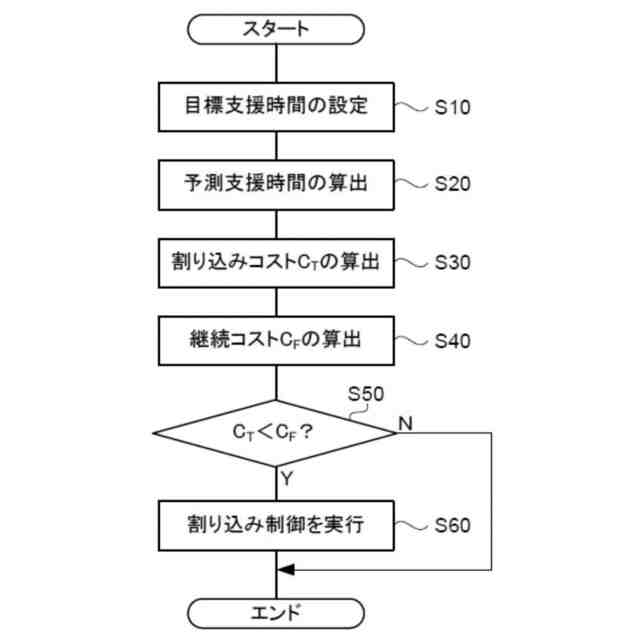
前記制御部は、前記算出部によってそれぞれ算出した、前記割り込み制御を行った場合の評価値である第1評価値(C
T
)と、前記割り込み制御を行わなかった場合の評価値である第2評価値(C
F
)を参照し、前記第2評価値よりも前記第1評価値が小さい場合は前記割り込み制御を実行し、前記第1評価値が前記第2評価値以上である場合は前記割り込み制御を行わないように前記第1車両及び前記第2車両に対する遠隔支援を行う
請求項1に記載の制御装置。
【請求項3】
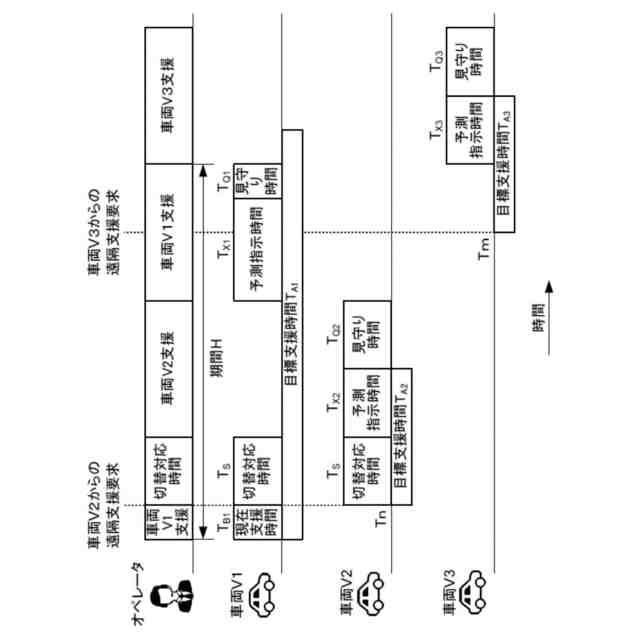
前記第1評価値の算出に用いる前記予測支援時間に、遠隔支援の状況を監視するオペレータが、遠隔支援の対象車両の走行情報を認知してから前記遠隔支援の対象車両に遠隔指示を行うまでの時間である予測指示時間(T
X
)と、遠隔支援の対象車両が遠隔支援要求を送信してから制御装置において遠隔支援の準備が整うまでの時間である予測事前時間(T
Z
)と、が含まれる
請求項2に記載の制御装置。
【請求項4】
前記予測事前時間に、前記制御部が遠隔支援の対象車両を切り替えるために要する時間である切替対応時間(T
S
)が含まれる
請求項3に記載の制御装置。
【請求項5】
前記第1車両における前記予測事前時間に、前記第2車両から遠隔支援要求を受け付けるまでに前記第1車両に対して既に実施済みの遠隔支援に費やした時間である現在支援時間(T
B1
)と、前記第2車両の遠隔支援に要する時間である支援時間(T
V2
)と、が含まれ、
前記第2車両における前記予測事前時間に、前記第2車両が遠隔支援要求を送信してから前記制御部が前記第2車両に対して割り込み制御を行うと判定するまでの待ち時間である現在待ち時間(T
W2
)が含まれる
請求項4に記載の制御装置。
【請求項6】
前記評価値が、前記第1車両及び前記第2車両の各々における前記割合の和によって表される
請求項2から請求項5の何れか1項に記載の制御装置。
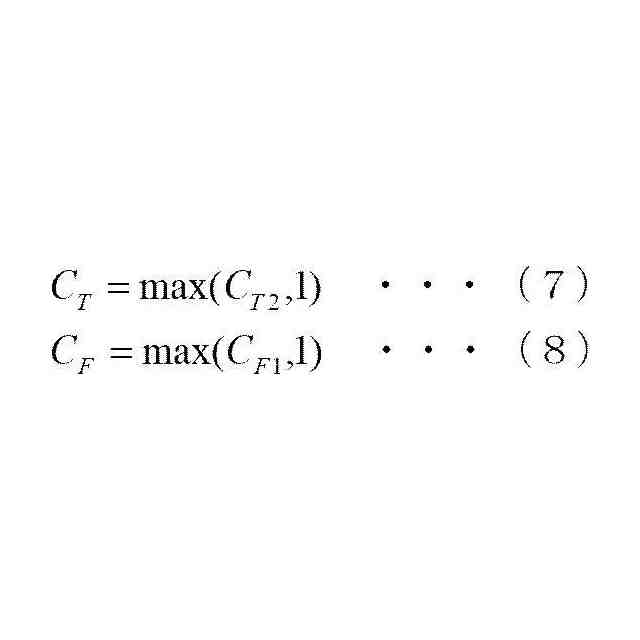
【請求項7】
前記算出部は、前記割合が1未満である場合、前記割合を1とする
請求項6に記載の制御装置。
【請求項8】
前記評価値が、前記第1車両及び前記第2車両の各々における、前記目標支援時間に対する前記予測支援時間の超過時間の和によって表される
請求項2から請求項5の何れか1項に記載の制御装置。
【請求項9】
前記制御部は、前記第1車両が運行することによって前記第1車両が周囲に与える影響度合いに応じて、前記第1車両に対する前記目標支援時間を補正すると共に、前記第2車両が運行することによって前記第2車両が周囲に与える影響度合いに応じて、前記第2車両に対する前記目標支援時間を補正する
請求項1から請求項5の何れか1項に記載の制御装置。
【請求項10】
前記第1車両及び前記第2車両がそれぞれ周囲に与える影響度合いに、前記第1車両又は前記第2車両のうち着目する車両の安全性に関する影響度合い、前記着目する車両が走行する道路における交通流への影響度合い、及び前記着目する車両に乗車する乗客への影響度合いの少なくとも1つが含まれる
請求項9に記載の制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、制御装置、及び制御プログラムに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
特許文献1には、複数の自動運転車両から対象車両を特定し、対象車両周辺の交通状況に基づいて対象車両の遠隔支援に係る作業時間及び優先度を算出し、算出結果から決定した対象車両に対する処理順序に従って、遠隔支援の作業をオペレータに割り当てる制御装置が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2019-185279号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
こうした制御装置では、特定の車両の遠隔支援中であっても、より優先度の高い車両から遠隔支援要求を受け付けた場合、特定の車両に対する遠隔支援を中断し、遠隔支援の対象を遠隔支援要求を行った車両に切り替える割り込み処理を行うことになる。
【0005】
したがって、他の車両よりも優先度の低い車両では、先に遠隔支援要求を行ったにもかかわらず、より優先度の高い車両に対する遠隔支援が終了するまで制御装置からの指示を待ち続ける状況が発生することがある。その結果、車両全体から見た場合の支援効率が低下することがあった。
【0006】
本開示は、より優先度の高い車両から遠隔支援を行う場合と比較して、車両の支援効率を向上させることができる制御装置、及び制御プログラムを提供することを目的とする。
【課題を解決するための手段】
【0007】
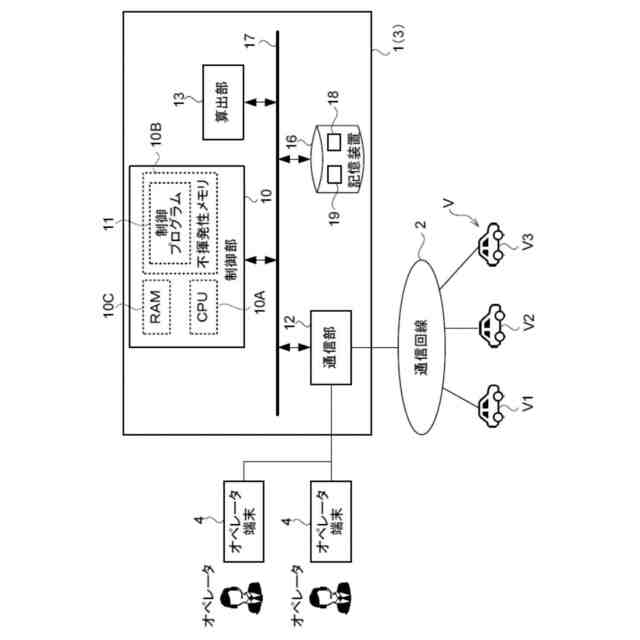
本開示の制御装置(1)は、通信回線(2)を通じて接続された第1車両(V1)に対する遠隔支援中に、前記通信回線を通じて接続された第2車両(V2、V3)から遠隔支援要求を受け付けた場合、前記第1車両及び前記第2車両の各々における、遠隔支援の内容に応じて予め定めた目標支援時間(T
A
)と遠隔支援に要する予測支援時間を用いて、前記第1車両に対する遠隔支援を中断して前記第2車両に対する遠隔支援を開始する割り込み制御を行うか否かを判定し、前記割り込み制御を行うか否かの判定結果に応じた態様で前記第1車両及び前記第2車両に対する遠隔支援を行う制御部(10)を備える。
【0008】
本開示の制御プログラム(11)は、通信回線(2)を通じて接続された第1車両(V1)に対する遠隔支援中に、前記通信回線を通じて接続された第2車両(V2、V3)から遠隔支援要求を受け付けた場合、前記第1車両及び前記第2車両の各々における、遠隔支援の内容に応じて予め定めた目標支援時間(T
A
)と遠隔支援に要する予測支援時間を用いて、前記第1車両に対する遠隔支援を中断して前記第2車両に対する遠隔支援を開始する割り込み制御を行うか否かを判定し、前記割り込み制御を行うか否かの判定結果に応じた態様で前記第1車両及び前記第2車両に対する遠隔支援を行う処理をコンピュータ(3)に実行させるプログラムである。
【発明の効果】
【0009】
本開示によれば、より優先度の高い車両から遠隔支援を行う場合と比較して、車両の支援効率を向上させることができる、という効果を有する。
【図面の簡単な説明】
【0010】
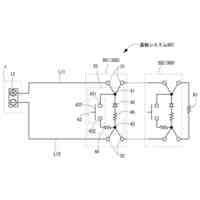
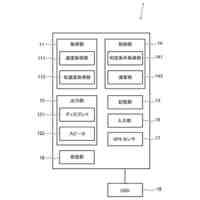
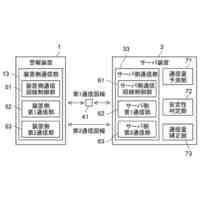
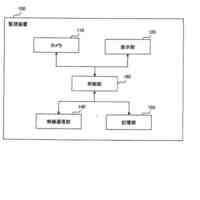
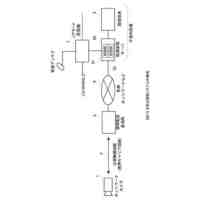
制御装置の構成例を示す図である。
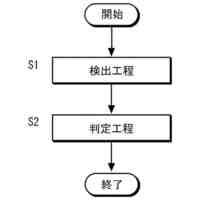
割り込み処理の流れの一例を示すフローチャートである。
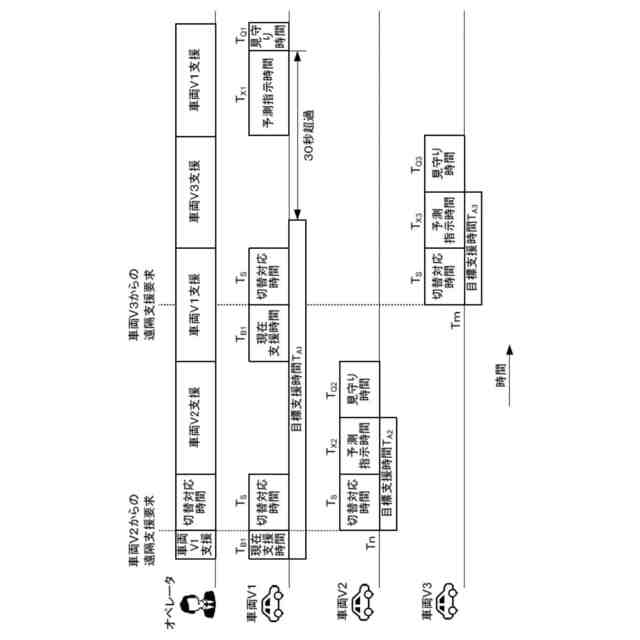
割り込み処理による割り込み制御の一例を示す図である。
優先度の高い車両から順に遠隔支援を行った場合の割り込み制御の一例を示す図である。
遠隔支援要求の受付順に従って遠隔支援を行った場合の一例を示す図である。
割り込みコスト及び継続コストの算出にmax演算子を用いなかった場合における割り込み制御の一例を示す図である。
保留遠隔支援要求が存在する場合に実行される割り込み制御の再判定処理の流れの一例を示すフローチャートである。
オペレータの指示に基づいて実行される割り込み処理の流れの一例を示すフローチャートである。
別のオペレータに遠隔支援要求を担当してもらうことができる割り込み処理の流れの一例を示すフローチャートである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
火器使用警報装置
1か月前
大阪瓦斯株式会社
警報装置
1か月前
株式会社大林組
誘導装置
1か月前
ホーチキ株式会社
通報システム
1か月前
アズビル株式会社
測定システム
23日前
ニッタン株式会社
発信機
1か月前
株式会社SUBARU
車載装置
1か月前
ニッタン株式会社
煙感知器
1か月前
加藤電機株式会社
車両用警報装置
2か月前
株式会社小糸製作所
転倒検知装置
1か月前
株式会社SUBARU
運転支援装置
1か月前
大阪瓦斯株式会社
音声出力システム
1か月前
株式会社ブリッツ
車両情報処理装置
1か月前
綜合警備保障株式会社
警備システム
1か月前
日本無線株式会社
人物探索システム
3日前
大阪瓦斯株式会社
音声出力システム
1か月前
大阪瓦斯株式会社
音声出力システム
1か月前
京セラ株式会社
案内システム及び案内方法
3日前
大阪瓦斯株式会社
音声出力システム
1か月前
株式会社大林組
監視システム
2か月前
能美防災株式会社
発信機
2か月前
大阪瓦斯株式会社
音声出力システム
1か月前
株式会社日本製鋼所
センシング装置
1か月前
日本信号株式会社
情報提供システム
25日前
トヨタ自動車株式会社
通信装置
1か月前
株式会社CCT
監視装置及び監視方法
1か月前
ニッタン株式会社
火災感知端末
1か月前
ニッタン株式会社
火災感知端末
1か月前
個人
安全に飛び乗りが可能な低速自動運転車
11日前
トヨタ車体株式会社
運転支援装置
1か月前
株式会社F2Fグループ
疲労度判定方法
10日前
株式会社ユピテル
システムおよびプログラム等
1か月前
株式会社日立国際電気
防災無線システム
2か月前
能美防災株式会社
火災感知器
2か月前
能美防災株式会社
防災表示盤
2か月前
日本信号株式会社
遠隔監視システム
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ