TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024154233
公報種別
公開特許公報(A)
公開日
2024-10-30
出願番号
2023067963
出願日
2023-04-18
発明の名称
制御方法、プログラム及び移動体
出願人
三菱重工業株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
G05D
1/43 20240101AFI20241023BHJP(制御;調整)
要約
【課題】他の搬送対象物との干渉を抑制しつつ、目的位置に早く到達する。
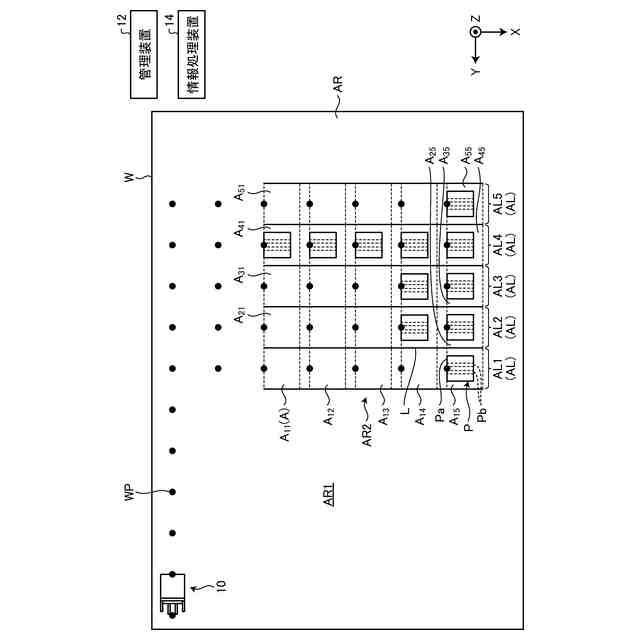
【解決手段】制御方法は、自動で移動する移動体の制御方法であって、対象物が配置される可能性がある単位領域が第1方向に並んだ配置領域内における、所定の単位領域に対応する位置を、移動体の目的位置に設定するステップと、目的位置以外の単位領域内に配置される対象物である他対象物の情報を取得するステップと、他対象物に干渉せずに配置領域内を通って目的位置に向かう、移動体の経路を設定するステップと、経路に従って前記移動体を移動させるステップと、を含み、他対象物の情報に基づき、配置領域内における移動体の移動速度と、経路のうちの配置領域内を通る区間との、少なくとも一方を設定する。
【選択図】図1
特許請求の範囲
【請求項1】
自動で移動する移動体の制御方法であって、
対象物が配置される可能性がある単位領域が第1方向に並んだ配置領域内における、所定の前記単位領域に対応する位置を、前記移動体の目的位置に設定するステップと、
前記目的位置以外の前記単位領域内に配置される前記対象物である他対象物の情報を取得するステップと、
前記他対象物に干渉せずに前記配置領域内を通って前記目的位置に向かう、前記移動体の経路を設定するステップと、
前記経路に従って前記移動体を移動させるステップと、
を含み、
前記他対象物の情報に基づき、前記配置領域内における前記移動体の移動速度と、前記経路のうちの前記配置領域内を通る区間との、少なくとも一方を設定する、
制御方法。
続きを表示(約 1,400 文字)
【請求項2】
前記経路を設定するステップにおいては、前記配置領域内において前記第1方向に向けて前記目的位置に到達するアプローチ区間を含むように、前記経路を設定する、請求項1に記載の制御方法。
【請求項3】
前記移動体を移動させるステップにおいては、前記経路のうちで前記配置領域内を通るアプローチ区間のうちの、前記移動体が前記目的位置よりも前に通る中間位置までの第1アプローチ区間での前記移動速度を、前記中間位置から前記目的位置までの第2アプローチ区間での前記移動速度よりも、高くする、請求項1又は請求項2に記載の制御方法。
【請求項4】
前記移動体を移動させるステップにおいては、前記第1アプローチ区間に対して前記第1方向に交差する第2方向側に位置する前記単位領域における、前記他対象物の情報に基づいて、前記第1アプローチ区間での前記移動速度を設定する、請求項3に記載の制御方法。
【請求項5】
前記移動体を移動させるステップにおいては、前記経路のうちの、前記配置領域外を通る領域外区間での前記移動速度を、前記配置領域内を通るアプローチ区間での前記移動速度よりも、高くする、請求項1又は請求項2に記載の制御方法。
【請求項6】
前記経路を設定するステップにおいては、前記第1方向に交差する第2方向から前記配置領域内に進入し、前記他対象物が配置されていない前記単位領域を経由して、前記目的位置に到達するアプローチ区間を含むように、前記経路を設定する、請求項1又は請求項2に記載の制御方法。
【請求項7】
前記経路を設定するステップにおいては、
前記第2方向から前記配置領域内に進入し、前記他対象物が配置されていない前記単位領域を経由して、前記目的位置に対して前記第1方向と反対方向側の前記単位領域と重なる直前位置に到達する第1アプローチ区間と、
前記直前位置から前記第1方向に向けて前記目的位置に到達する第2アプローチ区間と、
を含むように、前記アプローチ区間を設定する、請求項6に記載の制御方法。
【請求項8】
前記経路を設定するステップにおいては、前記他対象物と干渉せず、かつ、前記アプローチ区間が最短となるように、前記アプローチ区間を設定する、請求項6に記載の制御方法。
【請求項9】
前記経路を設定するステップにおいては、
前記配置領域内における前記移動体の移動速度の情報と、前記配置領域外における前記移動体の移動速度の情報とを取得し、
前記配置領域内における前記移動速度と、前記配置領域外における前記移動速度とに基づき、目的位置までの予測到達時間が最短となるように、前記配置領域外を通る領域外区間領域外区間及び前記アプローチ区間を設定する、請求項6に記載の制御方法。
【請求項10】
前記移動体を移動させるステップにおいては、
搬送対象となる対象物の位置及び姿勢を検出し、
前記対象物の位置及び姿勢に基づき、前記対象物をピックアップするために経路を更新する必要があるかを判断し、
前記経路を更新する必要があるかの判断結果に基づき、以降の制御内容を設定する、請求項1又は請求項2に記載の制御方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、制御方法、プログラム及び移動体に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
自動で移動して荷物を搬送する移動体が知られている。例えば特許文献1には、走行領域に作業者がいる場合には低速走行し、走行領域に作業者がいる場合には高速走行する自動搬送車が記載されている。
【先行技術文献】
【特許文献】
【0003】
特開2000-187513号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ここで、移動体は、他の搬送対象物が置かれている可能性がある領域を移動しつつ目的位置に向かう場合がある。そのため、このような場合において、他の搬送対象物との干渉を抑制しつつ、目的位置に早く到達することが求められている。
【0005】
本開示は、他の搬送対象物が置かれている可能性がある領域を移動しつつ目的位置に向かう際に、他の搬送対象物との干渉を抑制しつつ、目的位置に早く到達可能な制御方法、プログラム及び移動体を提供することを目的とする。
【課題を解決するための手段】
【0006】
本開示に係る制御方法は、自動で移動する移動体の制御方法であって、対象物が配置される可能性がある単位領域が第1方向に並んだ配置領域内における、所定の前記単位領域に対応する位置を、前記移動体の目的位置に設定するステップと、前記目的位置以外の前記単位領域内に配置される前記対象物である他対象物の情報を取得するステップと、前記他対象物に干渉せずに前記配置領域内を通って前記目的位置に向かう、前記移動体の経路を設定するステップと、前記経路に従って前記移動体を移動させるステップと、を含み、前記他対象物の情報に基づき、前記配置領域内における前記移動体の移動速度と、前記経路のうちの前記配置領域内を通る区間との、少なくとも一方を設定する。
【0007】
本開示に係るプログラムは、自動で移動する移動体の制御方法をコンピュータに実行させるプログラムであって、対象物が配置される可能性がある単位領域が第1方向に並んだ配置領域内における、所定の前記単位領域に対応する位置を、前記移動体の目的位置に設定するステップと、前記目的位置以外の前記単位領域内に配置される前記対象物である他対象物の情報を取得するステップと、前記他対象物に干渉せずに前記配置領域内を通って前記目的位置に向かう、前記移動体の経路を設定するステップと、前記経路に従って前記移動体を移動させるステップと、を含み、前記他対象物の情報に基づき、前記配置領域内における前記移動体の移動速度と、前記経路のうちの前記配置領域内を通る区間との、少なくとも一方を設定する。
【0008】
本開示に係る移動体は、自動で移動する移動体であって、前記移動体の経路を取得する経路取得部と、前記経路に従って前記移動体を移動させる移動制御部と、を含み、前記経路は、対象物が配置される可能性がある単位領域が第1方向に並んだ配置領域内における、所定の前記単位領域に対応する位置が、前記移動体の目的位置に設定され、前記目的位置以外の前記単位領域内に配置される前記対象物である他対象物の情報が取得されることで、前記他対象物に干渉せずに前記配置領域内を通って前記目的位置に向かうように、設定され、前記配置領域内における前記移動体の移動速度と、前記経路のうちの前記配置領域内を通る区間との、少なくとも一方は、前記他対象物の情報に基づき設定される。
【発明の効果】
【0009】
本開示によれば、他の搬送対象物が置かれている可能性がある領域を移動しつつ目的位置に向かう際に、他の搬送対象物との干渉を抑制しつつ、目的位置に早く到達できる。
【図面の簡単な説明】
【0010】
図1は、本実施形態に係る移動制御システムの模式図である。
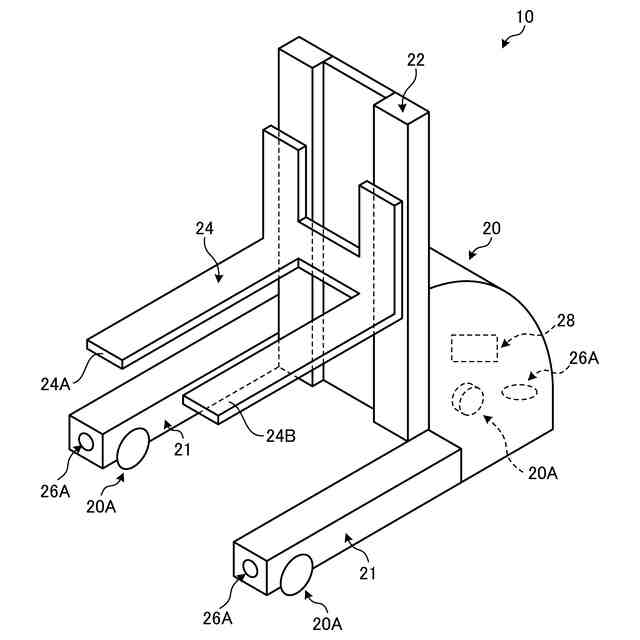
図2は、移動体の構成の模式図である。
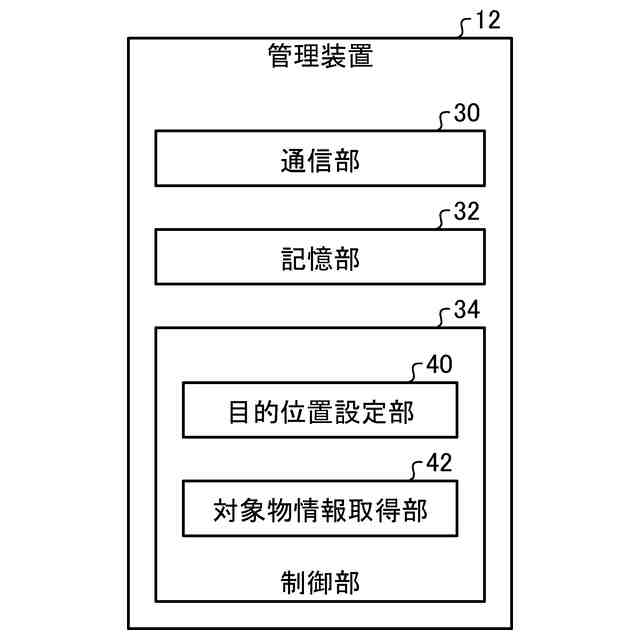
図3は、管理装置の模式的なブロック図である。
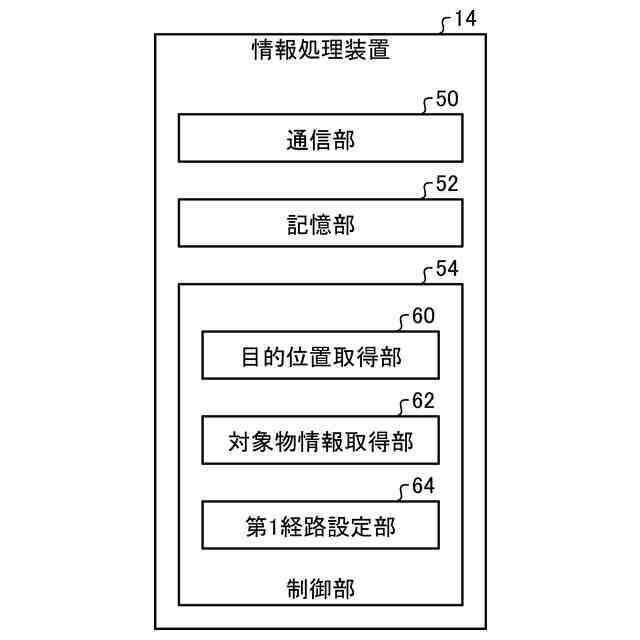
図4は、情報処理装置の模式的なブロック図である。
図5は、移動体の制御装置の模式的なブロック図である。
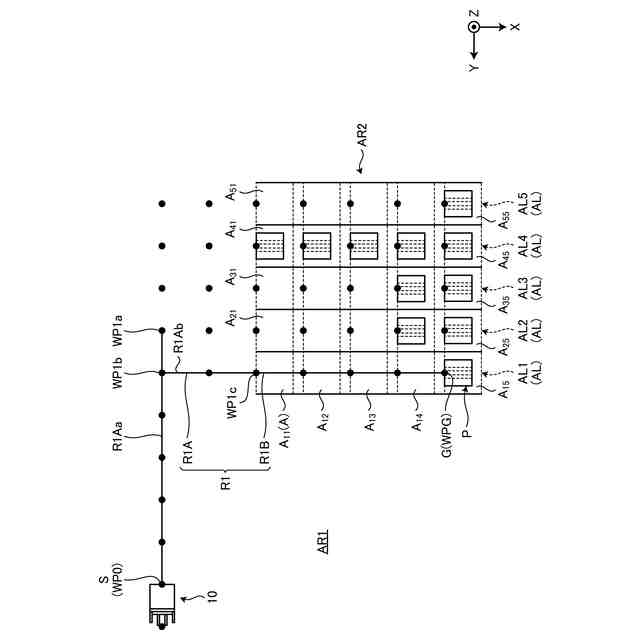
図6は、第1経路の一例を示す模式図である。
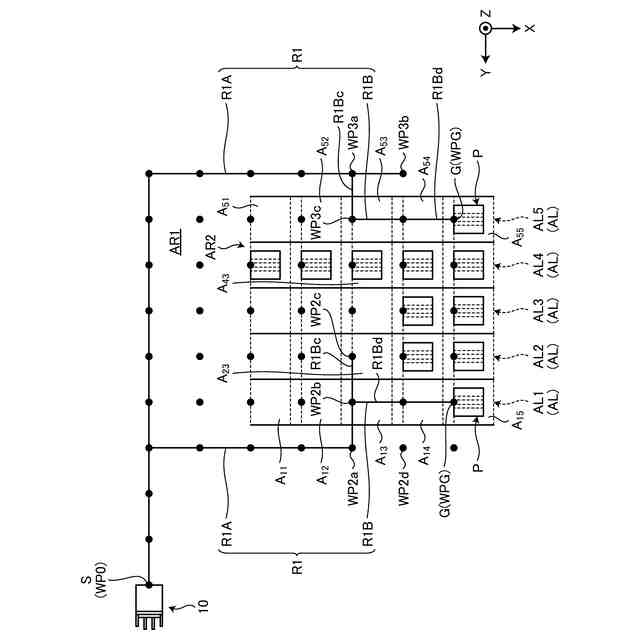
図7は、第2経路の一例を示す模式図である。
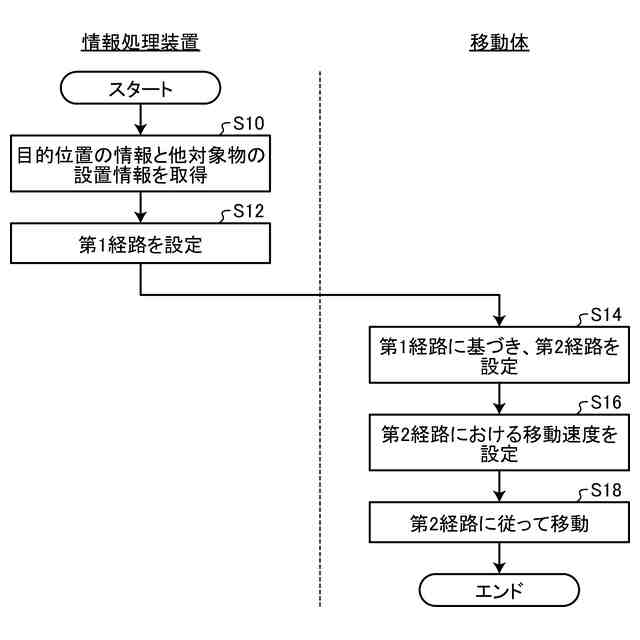
図8は、移動制御システムの処理フローを説明するフローチャートである。
図9は、第1経路の一例を示す模式図である。
図10は、第2経路の一例を示す模式図である。
図11は、第3実施形態における移動体の制御の例を示す模式図である。
図12は、第3実施形態に係る移動制御システムの処理フローを説明するフローチャートである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
他の特許を見る



 特許ウォッチ
特許ウォッチ