TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024148887
公報種別
公開特許公報(A)
公開日
2024-10-18
出願番号
2023062442
出願日
2023-04-07
発明の名称
制御装置および制御方法
出願人
アズビル株式会社
代理人
弁理士法人山王内外特許事務所
主分類
B25J
9/10 20060101AFI20241010BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】制約を満たしかつ駆動時間を短縮することが可能となるとともに、処理に要する演算量を低減することを可能とする。
【解決手段】軌跡を、通過点間の連続した区間であって、当該軌跡上の相対位置である観測位置が時間に関する多項式で表された区間である標本区間に分割する区間分割部102と、区間分割部102により分割された標本区間ごとに、観測位置の多項式の係数である観測運動係数を初期化する区間速度初期化部104と、区間分割部102により分割された標本区間ごとに、当該標本区間の通過に要する時間が制約条件を満たすなかで短くなるよう、区間速度初期化部104により初期化された観測運動係数を更新する区間速度更新部105と、区間速度更新部105により更新された観測運動係数に基づいて、ロボットアームが有する各関節の関節角度を制御時刻ごとに取得する時系列角度取得部106とを備えた。
【選択図】図1
特許請求の範囲
【請求項1】
軌跡を、通過点間の連続した区間であって、当該軌跡上の相対位置である観測位置が時間に関する多項式で表された区間である標本区間に分割する区間分割部と、
前記区間分割部により分割された標本区間ごとに、観測位置の多項式の係数である観測運動係数を初期化する区間速度初期化部と、
前記区間分割部により分割された標本区間ごとに、当該標本区間の通過に要する時間が制約条件を満たすなかで短くなるよう、前記区間速度初期化部により初期化された観測運動係数を更新する区間速度更新部と、
前記区間速度更新部により更新された観測運動係数に基づいて、ロボットアームが有する各関節の関節角度を制御時刻ごとに取得する時系列角度取得部と
を備えた制御装置。
続きを表示(約 1,000 文字)
【請求項2】
前記区間分割部により分割された標本区間ごとに、監視対象となる特徴量または当該特徴量を積分した値を観測位置の多項式で近似し、当該多項式の係数および当該特徴量に関する制約範囲を取得する区間情報取得部を備え、
前記区間速度更新部は、前記区間情報取得部による取得結果に基づいて、特徴量の出力範囲を算出し、当該出力範囲が制約範囲に違反しないように、前記区間速度初期化部により初期化された観測運動係数を更新する
ことを特徴とする請求項1記載の制御装置。
【請求項3】
前記区間分割部は、少なくとも1つ以上の関節の関節角度が極値をとる通過点が標本区間の境界となるように、軌跡を複数の標本区間に分割する
ことを特徴とする請求項1又は請求項2記載の制御装置。
【請求項4】
前記区間分割部は、監視対象となる特徴量または当該特徴量を積分した値のうち少なくとも1つ以上が極値をとる通過点が標本区間の境界となるように、軌跡を複数の標本区間に分割する
ことを特徴とする請求項2記載の制御装置。
【請求項5】
前記区間分割部は、標本区間において、前記監視対象となる特徴量または当該特徴量を積分した値のうち少なくとも1つ以上が所定の条件を満たすように、軌跡を複数の標本区間に分割する
ことを特徴とする請求項2記載の制御装置。
【請求項6】
前記区間分割部は、標本区間において、前記監視対象となる特徴量に関する制約範囲群のうち少なくとも1つ以上が所定の条件を満たすように、軌跡を複数の標本区間に分割する
ことを特徴とする請求項2記載の制御装置。
【請求項7】
区間分割部が、軌跡を、通過点間の連続した区間であって、当該軌跡上の相対位置である観測位置が時間に関する多項式で表された区間である標本区間に分割するステップと、
区間速度初期化部が、前記区間分割部により分割された標本区間ごとに、観測位置の多項式の係数である観測運動係数を初期化するステップと、
区間速度更新部が、前記区間分割部により分割された標本区間ごとに、当該標本区間の通過に要する時間が制約条件を満たすなかで短くなるよう、前記区間速度初期化部により初期化された観測運動係数を更新するステップと、
時系列角度取得部が、前記区間速度更新部により更新された観測運動係数に基づいて、ロボットアームが有する各関節の関節角度を制御時刻ごとに取得するステップと
を有する制御方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、ロボットアームを制御する制御装置および制御方法に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
産業分野における複数の関節を有するロボットアームは、プログラム等の指示に従い、現在位置から目標位置まで移動する。その際、現在位置から目標位置までの各関節の各制御時刻における関節角度指令値を事前に算出し、その指令値に従って各関節を駆動する方法がある。そして、ロボットアームを高速に駆動して駆動時間を短縮したいという要求がある。
【0003】
このような要求に答えるべく、例えば特許文献1に示すように、ロボットアームの駆動時間を短縮する制御方法が開示されている。
この特許文献1に開示された制御方法では、軌跡の始点から終点まで多数の通過点を細かく設定し、始点から順に各通過点での関節角速度を、速度または加速度に課せられた各種制約に違反しない範囲でなるべく速くする。これにより、特許文献1に開示された制御方法では、軌跡における始点から終点までの駆動時間を短縮できる。
【先行技術文献】
【特許文献】
【0004】
特開2008-194760号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に開示された制御方法では、軌道中の数多くの通過点のそれぞれについて速度を決定する処理を行うため、その処理に要する全体の演算量が多くなるという課題がある。
【0006】
本開示は、上記のような課題を解決するためになされたもので、制約を満たしかつ駆動時間を短縮することが可能となるとともに、処理に要する演算量を低減することが可能となる制御装置を提供することを目的としている。
【課題を解決するための手段】
【0007】
本開示に係る制御装置は、軌跡を、通過点間の連続した区間であって、当該軌跡上の相対位置である観測位置が時間に関する多項式で表された区間である標本区間に分割する区間分割部と、区間分割部により分割された標本区間ごとに、観測位置の多項式の係数である観測運動係数を初期化する区間速度初期化部と、区間分割部により分割された標本区間ごとに、当該標本区間の通過に要する時間が制約条件を満たすなかで短くなるよう、区間速度初期化部により初期化された観測運動係数を更新する区間速度更新部と、区間速度更新部により更新された観測運動係数に基づいて、ロボットアームが有する各関節の関節角度を制御時刻ごとに取得する時系列角度取得部とを備えたことを特徴とする。
【発明の効果】
【0008】
本開示によれば、上記のように構成したので、制約を満たしかつ駆動時間を短縮することが可能となるとともに、処理に要する演算量を低減することが可能となる。
【図面の簡単な説明】
【0009】
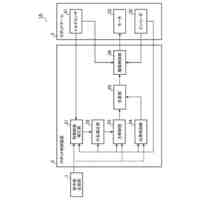
実施の形態1に係る制御装置の構成例を示す図である。
実施の形態1に係る制御装置の動作例を示すフローチャートである。
実施の形態1における通過点情報取得部の動作例を示すフローチャートである。
実施の形態1における区間情報取得部の動作例を示すフローチャートである。
実施の形態1における区間速度初期化部の動作例を示すフローチャートである。
実施の形態1における区間速度初期化部が用いる全体S字カーブの一例を示す図である。
実施の形態1における区間速度更新部の動作例を示すフローチャートである。
実施の形態1における区間速度更新部による更新前後のS字カーブの一例を示す図である。
実施の形態1における時系列角度取得部の動作例を示すフローチャートである。
実施の形態1における関節制御部の動作例を示すフローチャートである。
実施の形態2における区間分割部の動作例を示すフローチャートである。
実施の形態4における区間分割部の動作例を示すフローチャートである。
【発明を実施するための形態】
【0010】
以下、実施の形態について図面を参照しながら詳細に説明する。
実施の形態1.
図1は実施の形態1に係る制御装置1の構成例を示す図である。
制御装置1は、図1に示すように、通過点情報取得部101、区間分割部102、区間情報取得部103、区間速度初期化部104、区間速度更新部105、時系列角度取得部106、および、関節制御部107を備えている。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
アズビル株式会社
角度検出装置およびポジショナ
23日前
アズビル株式会社
パイロットリレー及びポジショナ
3日前
アズビル株式会社
ひずみ検出装置、及びトルクセンサ
3日前
アズビル株式会社
ロボット制御装置、ロボット制御システム及びロボット制御方法
4日前
個人
木製ハンマー
3か月前
個人
関節モジュール
3か月前
個人
寸切りボルト回し
2か月前
個人
スロットルトリガー
3か月前
中国電力株式会社
腰袋
6か月前
太陽工業株式会社
チャック装置
2か月前
コクヨ株式会社
補助器具
2か月前
日東工器株式会社
衝撃工具
5か月前
日東工器株式会社
動力工具
3か月前
日東工器株式会社
動力工具
3か月前
日東工器株式会社
動力工具
3か月前
日東工器株式会社
動力工具
3か月前
川崎重工業株式会社
ロボット
3日前
個人
メンテナンス用スタンド
4か月前
CKD株式会社
把持装置
3か月前
株式会社マキタ
打撃工具
23日前
川崎重工業株式会社
罫書用治具
5か月前
オムロン株式会社
電動把持工具
2か月前
学校法人立命館
グリッパ
3か月前
トヨタ自動車株式会社
ロボット
3か月前
東京計器株式会社
接触検知装置
3か月前
株式会社マキタ
動力工具
6か月前
株式会社ダイヘン
制御装置
1か月前
白山工業株式会社
ロボットアーム
3か月前
トヨタ自動車株式会社
ハンド構造
5か月前
株式会社ダイヘン
搬送装置
23日前
株式会社マキタ
電動ハンマ
1か月前
株式会社ダイヘン
搬送装置
6か月前
株式会社ダイヘン
搬送装置
6か月前
個人
容器引っ掛け棒およびその使用方法
4か月前
株式会社ダイヘン
搬送装置
1か月前
株式会社ハーモ
開閉チャック装置
4か月前
続きを見る
他の特許を見る










 特許ウォッチ
特許ウォッチ