TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024139332
公報種別
公開特許公報(A)
公開日
2024-10-09
出願番号
2023050222
出願日
2023-03-27
発明の名称
天井裏走行ロボットおよび天井裏配線支援システム
出願人
株式会社関電工
,
独立行政法人国立高等専門学校機構
代理人
個人
,
個人
主分類
G05D
1/43 20240101AFI20241002BHJP(制御;調整)
要約
【課題】遠方まで撮影可能な天井裏走行ロボット等を提供すること。
【解決手段】天井裏走行ロボット40は、複数の車輪46が取り付けられたフレーム43と、先端部に全天球カメラ44が取り付けられたカメラ支持柱441と、前記カメラ支持柱441を、前記フレーム43に対して直立状態と水平状態とに回動させる回動部445とを備える。天井裏走行ロボット40は、前記カメラ支持柱441が水平状態になったことを検出する水平検知センサ448を備える。
【選択図】図2
特許請求の範囲
【請求項1】
複数の車輪が取り付けられたフレームと、
先端部に全天球カメラが取り付けられたカメラ支持柱と、
前記カメラ支持柱を、前記フレームに対して直立状態と水平状態とに回動させる回動部と
を備える天井裏走行ロボット。
続きを表示(約 1,000 文字)
【請求項2】
前記カメラ支持柱が水平状態になったことを検出する水平検知センサを備える
請求項1に記載の天井裏走行ロボット。
【請求項3】
前記フレームに取り付けられた第1照明部を備える
請求項1に記載の天井裏走行ロボット。
【請求項4】
前記カメラ支持柱に取り付けられた第2照明部を備える
請求項1に記載の天井裏走行ロボット。
【請求項5】
前記フレームは、
多角形の支持枠と、
前記支持枠のそれぞれの頂点から前記支持枠から斜め下向きに延びるモータ保持枠と、
それぞれの前記モータ保持枠に保持されたモータと、
前記支持枠の下面に取り付けられた台座と
を備え、
前記車輪は、それぞれのモータのモータ軸に取り付けられており、
前記回動部は、前記台座の上に配置されている
請求項1に記載の天井裏走行ロボット。
【請求項6】
前記フレームは、絶縁体で覆われている
請求項1に記載の天井裏走行ロボット。
【請求項7】
前記車輪は、障害物を踏んだ場合に前記障害物を包み込むように変形する
請求項1に記載の天井裏走行ロボット。
【請求項8】
前記車輪は、
円筒形の車軸と、
前記車軸と同じ高さを有する円筒形のリムと、
前記車軸と前記リムとを接続する複数のスポークとを備え、
前記スポークは、前記車軸の高さと同一長さの短辺を有する長方形板状であり、
一体のゴム製である
請求項1に記載の天井裏走行ロボット。
【請求項9】
前記リムは、ラバーコーティングされている
請求項8に記載の天井裏走行ロボット。
【請求項10】
前記モータ軸の側面を覆い、該モータ軸に固定された車輪保持具を備え、
前記車輪保持具は、
前記モータ軸と同軸に配置された柱状部と、
前記柱状部の前記モータ保持枠側の端部に配置された鍔部と、
前記鍔部から前記柱状部を挟んで延びる一組のレバー部とを備え、
前記レバー部を互いに近づけるように弾性変形させた場合に、前記車輪を着脱可能であり、
前記レバー部を弾性復帰させた場合に、前記車輪を保持する
請求項5に記載の天井裏走行ロボット。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、天井裏走行ロボットおよび天井裏配線支援システムに関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
障害物を乗り越えながら天井裏を移動して、配線材を敷設できるロボットが提案されている(特許文献1)。
【先行技術文献】
【特許文献】
【0003】
特開2017-208903号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1のロボットは、周囲を撮影するカメラを有する。ユーザは、カメラにより撮影された画像を見て、ロボットをリモートコントロールする。
【0005】
しかしながら特許文献1のロボットは、天井裏の狭い空間を移動できるように、低背に構成されている。カメラも低い位置に配置されているため、たとえば障害物の向こう側は撮影できない。したがってロボットを操縦するユーザは、必ずしも最適なルートを選択できない。
【0006】
一つの側面では、遠方まで撮影可能な天井裏走行ロボット等の提供を目的とする。
【課題を解決するための手段】
【0007】
天井裏走行ロボットは、複数の車輪が取り付けられたフレームと、先端部に全天球カメラが取り付けられたカメラ支持柱と、前記カメラ支持柱を、前記フレームに対して直立状態と水平状態とに回動させる回動部とを備える。
【発明の効果】
【0008】
一つの側面では、遠方まで撮影可能な天井裏走行ロボット等を提供できる。
【図面の簡単な説明】
【0009】
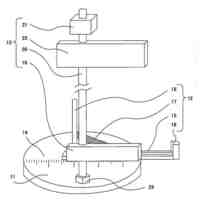
天井裏配線支援システムの構成を説明する説明図である。
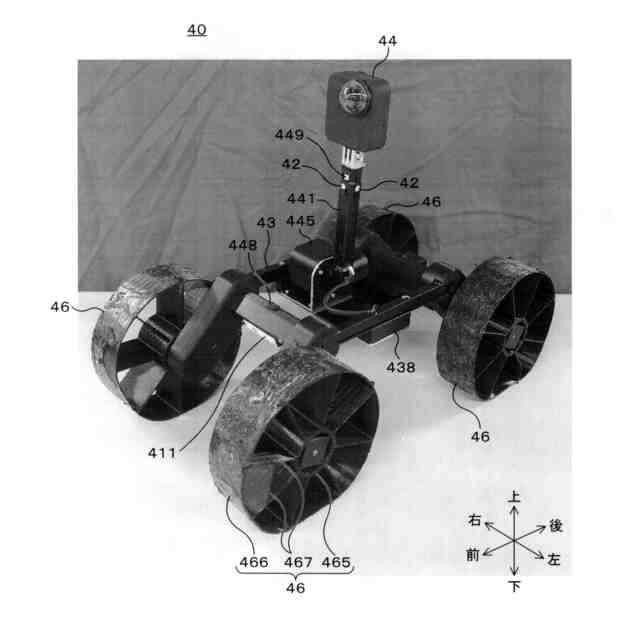
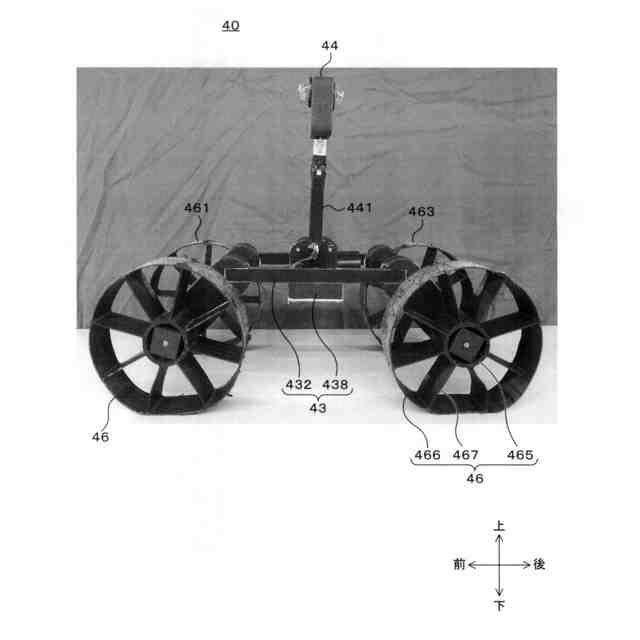
カメラ支持柱を直立状態にした天井裏走行ロボットの外観写真である。
カメラ支持柱を直立状態にした天井裏走行ロボットの外観写真である。
カメラ支持柱を水平状態にした天井裏走行ロボットの外観写真である。
コントローラの外観を説明する説明図である。
ケーブルリールの構成を説明する説明図である。
フレームの骨格を説明する説明図である。
骨格に外装部材である絶縁カバーを取り付けたフレームを説明する説明図である。
プログラムの処理の流れを説明するフローチャートである。
実施の形態2の天井裏走行ロボットの一部を拡大した外観写真である。
車輪を取り外した状態を示す外観写真である。
車輪保持具の斜視図である。
車輪保持具の半断面図である。
車輪保持具の上面図である。
車輪の変形例の斜視図である。
変形例の車輪保持具の斜視図である。
【発明を実施するための形態】
【0010】
[実施の形態1]
図1は、天井裏配線支援システム10の構成を説明する説明図である。天井裏配線支援システム10は、コントローラ20と、天井裏走行ロボット40とを備える。コントローラ20と天井裏走行ロボット40とは、ケーブル15で接続されている。ケーブル15は、信号線と電源線とを含む多芯ケーブルである。ケーブル15の途中にケーブルリール60が接続されている。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
株式会社関電工
内径測定装置。
24日前
個人
方向検出器
3日前
積水樹脂株式会社
磁性シート
1か月前
ugo株式会社
移動体
3日前
個人
車両レバー操作装置
1か月前
株式会社豊田自動織機
無人走行体
1か月前
エイブリック株式会社
基準電圧回路
1か月前
アズビル株式会社
設定システム
1か月前
エイブリック株式会社
基準電圧回路装置
1か月前
トヨタ自動車株式会社
自律移動体
2日前
トヨタ自動車株式会社
搬送ロボット
16日前
オムロン株式会社
自律作業システム
1か月前
トヨタ自動車株式会社
搬送システム
26日前
株式会社熊谷組
巡回ルート作成装置
1か月前
株式会社ダイヘン
電力変換装置
1か月前
株式会社ダイヘン
電力変換装置
1か月前
エイブリック株式会社
シャントレギュレータ
1か月前
エイブリック株式会社
ボルテージレギュレータ
1か月前
トヨタ自動車株式会社
ロボットシステム
26日前
トヨタ自動車株式会社
自律移動システム
2日前
トヨタ自動車株式会社
位置推定システム
2日前
株式会社栗本鐵工所
操作装置
17日前
オムロン株式会社
設計装置および設計方法
1か月前
株式会社FUJI
工作機械の操作システム
9日前
東芝ライテック株式会社
管理システム
1か月前
株式会社ダイフク
物品搬送設備
1か月前
株式会社FUJI
作業機の操作表示システム
1か月前
株式会社ダイフク
物品搬送設備
26日前
CKD日機電装株式会社
モデルフリーポジカスト制御
16日前
アズビル株式会社
診断システムおよび診断方法
1か月前
株式会社豊田自動織機
無人走行体の走行制御システム
1か月前
株式会社栗本鐵工所
触覚提示装置
1か月前
トヨタ自動車株式会社
操作装置及び移動ロボット
24日前
株式会社豊田自動織機
移動体制御システム
1か月前
横河電機株式会社
モジュール
1か月前
本田技研工業株式会社
運転補助装置
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ