TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024129495
公報種別
公開特許公報(A)
公開日
2024-09-27
出願番号
2023038735
出願日
2023-03-13
発明の名称
人工衛星システム、人工衛星システム群、並びにその制御方法
出願人
株式会社日立製作所
,
国立大学法人 東京大学
代理人
ポレール弁理士法人
主分類
B64G
1/10 20060101AFI20240919BHJP(航空機;飛行;宇宙工学)
要約
【課題】目標位置に対して安定的にフォーメーションを維持することが可能となる人工衛星システム、人工衛星システム群、並びにその制御方法を提供する。
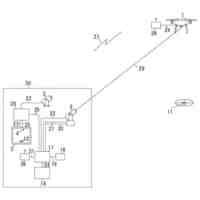
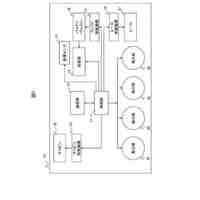
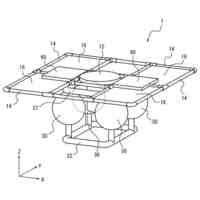
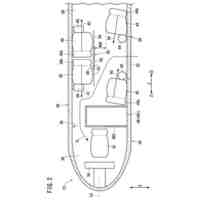
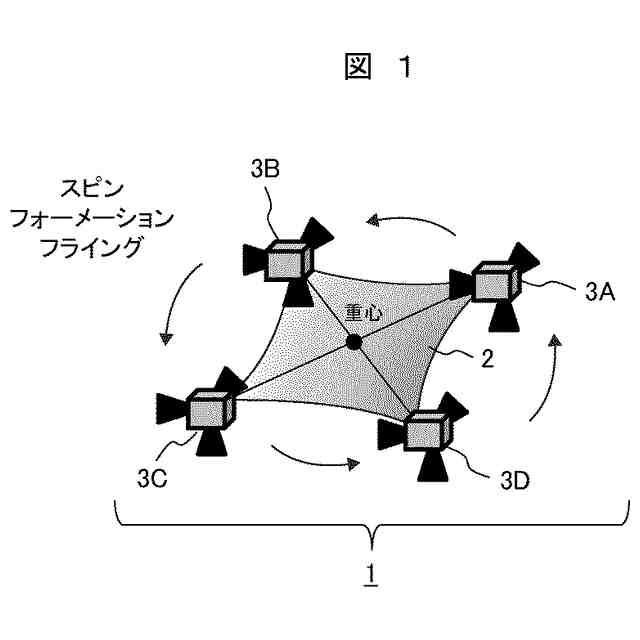
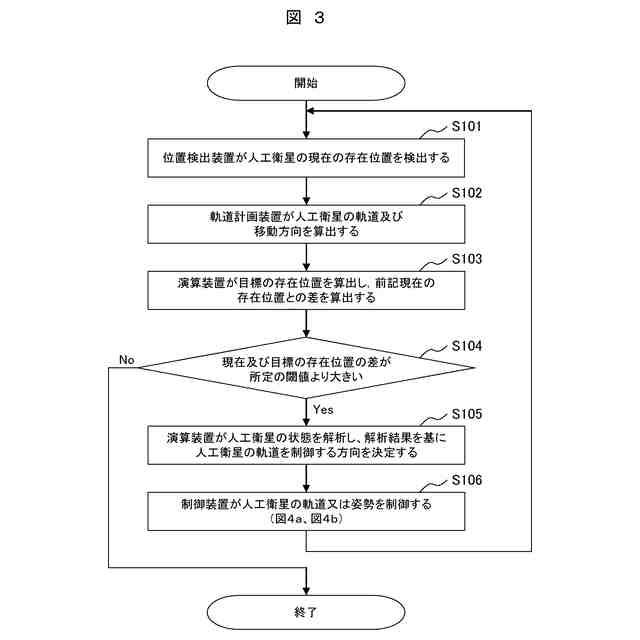
【解決手段】多角形の柔軟構造物の端部が人工衛星により支持されて、太陽光を受電しマイクロ波ビームを送信する人工衛星システムであって、人工衛星システムは、人工衛星の存在位置を検出するための位置検出装置と、人工衛星の軌道又は移動方向を決定する軌道計画装置と、軌道又は移動方向における人工衛星の存在位置を算出し、位置検出装置で検出された存在位置と算出された存在位置との差があらかじめ設定した閾値の範囲内かの判定及び前記人工衛星の平面性、もしくは振動モード、もしくは剛体モード、もしくは固有振動数、もしくは回転角速度の少なくとも一つを含む人工衛星システムの状態の判定を行う演算装置と、演算装置の判定結果に基づき、人工衛星の軌道を制御する制御装置を含んで構成されていることを特徴とする人工衛星システム。
【選択図】図1
特許請求の範囲
【請求項1】
構造物が人工衛星により支持されている人工衛星システムであって、
前記人工衛星システムは、前記人工衛星の存在位置を検出するための位置検出装置と、前記人工衛星の軌道又は移動方向を決定する軌道計画装置と、前記軌道又は移動方向における前記人工衛星の存在位置を算出し、前記位置検出装置で検出された前記存在位置と算出された前記存在位置との差があらかじめ設定した閾値の範囲内かの判定、及び前記人工衛星システムの平面性、もしくは振動モード、もしくは剛体モード、もしくは固有振動数、もしくは回転角速度の少なくとも一つを含む人工衛星システムの状態の判定を行う演算装置と、前記演算装置の判定結果に基づき、前記人工衛星の軌道を制御する制御装置を含んで構成され、
前記演算装置は、前記判定結果に基づき、前記人工衛星の軌道を制御する方向を決定し、かつ、前記制御装置が制御することができる方向との角度差があらかじめ設定した閾値の範囲内の場合に、前記制御装置を使用することを特徴とする人工衛星システム。
続きを表示(約 1,300 文字)
【請求項2】
請求項1に記載の人工衛星システムであって、
前記軌道計画装置は、前記人工衛星の軌道又は移動方向を、所定軸周りの所定の角速度による回転運動の軌道により決定することを特徴とする人工衛星システム。
【請求項3】
請求項1に記載の人工衛星システムであって、
前記人工衛星システムは、張力を測定する張力測定装置又は遠心力を算出する遠心力算出装置を有し、
前記演算装置は、前記張力測定装置で測定した張力、又は、前記遠心力算出装置で算出した遠心力があらかじめ設定した閾値の範囲内かを判定し、前記人工衛星の軌道を制御する方向を決定することを特徴とする人工衛星システム。
【請求項4】
請求項1に記載の人工衛星システムであって、
前記人工衛星システムの状態の判定を行う前記演算装置は、
前記人工衛星の存在位置から前記人工衛星システムの状態の判定を行う、
又は、
前記張力測定装置から得られる張力又は前記遠心力算出装置から得られる遠心力から前記人工衛星システムの状態の判定を行う、
ことを特徴とする人工衛星システム。
【請求項5】
請求項1に記載の人工衛星システムであって、
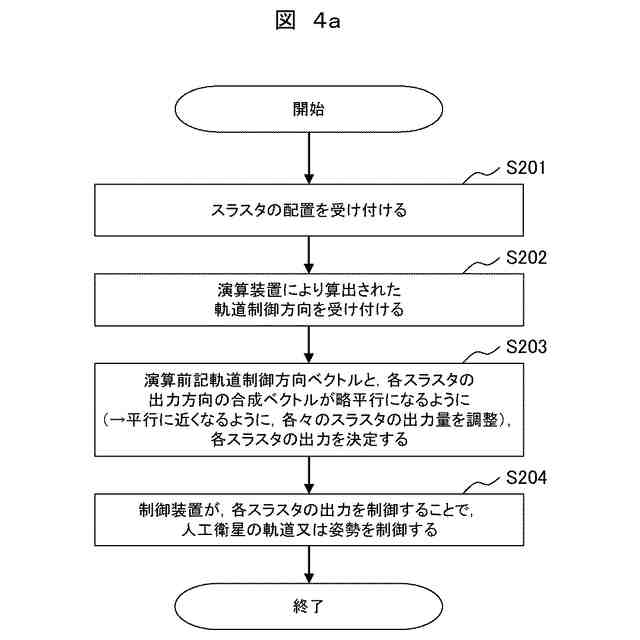
複数のスラスタを含む前記制御装置は、スラスタ配置と軌道制御方向に応じてスラスタの出力を決定し制御することを特徴とする人工衛星システム。
【請求項6】
請求項1に記載の人工衛星システムであって、
複数のスラスタを含む前記制御装置は、スラスタ配置とスラスタの選択条件と軌道制御方向に応じて選択されたスラスタの出力を決定し制御することを特徴とする人工衛星システム。
【請求項7】
請求項1に記載の人工衛星システムであって、
ジンバル機構により出力調整方向が可変となる複数のスラスタを含む前記制御装置は、スラスタ配置と軌道制御方向に応じてスラスタの出力を決定し制御することを特徴とする人工衛星システム。
【請求項8】
請求項1に記載の人工衛星システムであって、
太陽輻射圧を利用することにより前記人工衛星システムの姿勢または軌道を制御可能とする機構を含む前記制御装置は、前記人工衛星システムの複数の箇所における太陽輻射圧トルクを制御することを特徴とする人工衛星システム。
【請求項9】
請求項1に記載の人工衛星システムであって、複数のアンテナ素子からなるフェーズドアレイアンテナを備え、前記演算装置は、前記フェーズドアレイアンテナにより送信及び受信する信号の各々のアンテナ素子における位相情報を利用して、前記人工衛星の運動の状態を判定し、前記制御装置により前記人工衛星の姿勢及び軌道を制御することを特徴とする人工衛星システム。
【請求項10】
請求項1に記載の人工衛星システムであって、
前記人工衛星の位置情報、質量情報、又は速度の情報を、前記人工衛星の間で通信する送受信機を備え、前記軌道計画装置は、前記送受信機により通信された情報に基づき、前記人工衛星の軌道又は移動方向を決定することを特徴とする人工衛星システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、人工衛星システム、人工衛星システム群、並びにその制御方法に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
宇宙太陽光発送電システム(Space Solar Power Systems: SSPS)においては、静止軌道上に設置された太陽電池で発電したエネルギーをマイクロ波で地上に送電する。
【0003】
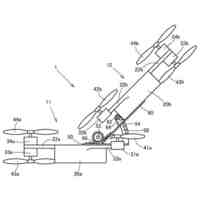
マイクロ波を地上の直径数kmの領域に収斂させるためには、例えば静止軌道高度ではアンテナサイズがkmオーダである必要があるという物理学的制約があるため、軌道上での大型構造物の建造・維持が必要である。然しながら、従来のトラスビームによる構造の展開及び維持方式では、重量増大(打上コスト大)のため大型化が難しく、軽量化を実現する膜展開方式のコンセプトが提案されている。
【0004】
この点に関し特許文献1は、「宇宙太陽光発電ステーションであって、宇宙空間内に所定の軌道アレーフォーメーションで非接続に配置される複数の可縮衛星モジュールを備え、各可縮衛星モジュールが、互いに可動接続され、前記衛星モジュールの少なくとも一軸方向における寸法を縮小可能とする複数の構造素子並びに、前記複数の可動素子上にそれぞれ配置された複数の発電タイルを備え、各発電タイルが、少なくとも1つの太陽光発電セル、及び、該太陽光発電セル上に配列された少なくとも1つの電力トランスミッタを有し、前記少なくとも1つの太陽光発電セル及び前記少なくとも1つの電力トランスミッタは、互いに信号接続され、前記少なくとも1つの太陽光発電セルで太陽放射を捕集して発生させた電流により、前記少なくとも1つの電力トランスミッタに電力を供給するように構成され、前記少なくとも1つの電力トランスミッタの各々がアンテナ及び該アンテナに給電されるラジオ周波電力信号の位相を制御し、前記電力トランスミッタを他の発電タイルにおける電力トランスミッタと連携させてフェーズドアレイを形成する制御エレクトロニクスを備え;各衛星モジュールが直線エッジ状の幾何学的形状を画定するよう、前記衛星モジュールの外形状が直線エッジ部を有する、宇宙太陽光発電ステーション。」のように構成することを提案している。
【先行技術文献】
【特許文献】
【0005】
特表2018-525265号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
宇宙空間において大面積の太陽光パネルを、太陽光指向に維持することは、全体の送電容量を大きく維持するために重要であるが、単一衛星と異なり、膜状の衛星システムの姿勢及び軌道を、軽量性を維持しながら安定的に維持・制御することが課題となっている。
【0007】
この課題は、より具体的に述べると、形状・重心が変化し得る宇宙構造物の全体形状・軌道を維持することが困難である点、遠心力・推進力による張力で複合構造物の姿勢を安定させる際、張力による縮退、または破壊されることのないよう制御が必要となる点、重力傾斜トルク等の外乱による影響を補正することが必要となる点などである。
【0008】
これに対し、特許文献1には、複数の独立した衛星モジュールを軌道アレーフォーメーションにおける適当な軌道軌跡に投入し、各衛星モジュールは位置決めセンサからデータ等を用いてスラスタにより姿勢や方向制御することが開示されている。
【0009】
しかしながら特許文献1においても、目標位置に対して安定的にフォーメーションを維持する方法については開示していない。これは、位置検出装置で検出された存在位置と算出された存在位置との差があらかじめ設定した閾値の範囲内かを判定する方法が明らかにされていないということである。
【0010】
以上のことから本発明においては、目標位置に対して安定的にフォーメーションを維持することが可能となる人工衛星システム、人工衛星システム群、並びにその制御方法を提供することを目的とする。
【課題を解決するための手段】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
飛行体
5か月前
個人
ドローン係留装置
8か月前
株式会社三圓
浮上装置
8日前
個人
空港用貨物搬送車
4か月前
個人
ドローンの計測飛行方法
10か月前
個人
飛行艇
2か月前
個人
ドローンの計測操作方法3
14日前
個人
ドローンの計測操作方法2
14日前
個人
自由落下運航システム
6か月前
個人
人工衛星推進材循環エンジン
4か月前
個人
マルチコプター型電気飛行機
5か月前
キヤノン電子株式会社
磁気トルカ
1か月前
合同会社アドエア
飛行体落下補助装置
7か月前
株式会社中北製作所
羽ばたき装置
5か月前
株式会社中北製作所
羽ばたき装置
4か月前
株式会社SUBARU
電動航空機
4か月前
株式会社セネック
ドローンポート
3か月前
株式会社セネック
ドローンポート
3か月前
個人
飛行体
8か月前
河村電器産業株式会社
設備点検システム
10か月前
株式会社SUBARU
回転翼航空機
4か月前
国立大学法人九州大学
飛行体
6か月前
京セラ株式会社
発着装置
11か月前
CAPXLE株式会社
緊急避難用気球
10か月前
CAPXLE株式会社
緊急避難用気球
10か月前
CAPXLE株式会社
緊急避難用気球
10か月前
SkyDeer株式会社
衛星制御方法
6か月前
株式会社小糸製作所
航空機用灯具
29日前
本田技研工業株式会社
移動体
1か月前
株式会社デンソー
推進装置
2か月前
本田技研工業株式会社
移動体
1か月前
株式会社JVCケンウッド
撮像システム
10か月前
株式会社デンソー
推進装置
8か月前
株式会社FINEMECH
連結型回転翼航空機
10か月前
株式会社SUBARU
構造体の製造方法
28日前
株式会社SUBARU
構造体の製造方法
25日前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ