TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024127289
公報種別
公開特許公報(A)
公開日
2024-09-20
出願番号
2023036340
出願日
2023-03-09
発明の名称
推進装置、及び飛行体
出願人
三菱重工業株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
B64U
30/26 20230101AFI20240912BHJP(航空機;飛行;宇宙工学)
要約
【課題】より多くの種類の部品の異常を検知することが可能な推進装置、及び飛行体を提供する。
【解決手段】推進装置は、軸線回りに回転可能な回転軸と、回転軸を駆動する電動機と、回転軸を回転可能に支持する軸受部と、回転軸に一体に設けられた回転翼と、軸受部を支持するダクトと、ダクトに対する回転軸、回転翼、及び軸受部の少なくとも1つを含む複数個所の振動による異常状態を検知可能な検知部と、を備え、検知部は、振動の加速度を取得する振動センサーと、振動の周波数を予め定められた通過帯域ごとに通過させるフィルター部と、通過帯域に基づいて、異常状態が生じている箇所を特定する異常特定部と、を有する。
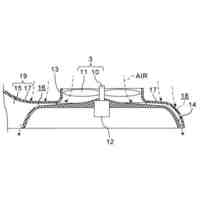
【選択図】図3
特許請求の範囲
【請求項1】
軸線回りに回転可能な回転軸と、
該回転軸を駆動する電動機と、
該回転軸を回転可能に支持する軸受部と、
前記回転軸に一体に設けられた回転翼と、
前記軸受部を支持するダクトと、
前記ダクトに対する前記回転軸、前記回転翼、及び前記軸受部の少なくとも1つを含む複数個所の振動による異常状態を検知可能な検知部と、
を備え、
前記検知部は、
前記振動の加速度を取得する振動センサーと、
前記振動の周波数を予め定められた通過帯域ごとに通過させるフィルター部と、
前記通過帯域に基づいて、前記異常状態が生じている前記箇所を特定する異常特定部と、を有する推進装置。
続きを表示(約 720 文字)
【請求項2】
前記軸受部は、
前記回転軸の周囲に設けられた内輪と、
前記回転軸に接触しながら転動する複数の転動体と、
該複数の転動体を前記内輪との間で保持する外輪と、
を有し、
前記フィルター部は、前記内輪、前記転動体、及び前記外輪のそれぞれについて予め定められた前記通過帯域ごとに設けられた複数の加速度フィルター部を有する請求項1に記載の推進装置。
【請求項3】
前記検知部は、前記周波数を積分することで前記振動の速度を取得する速度取得部をさらに有し、
前記フィルター部は、前記回転軸、及び前記回転翼について予め定められた前記通過帯域を有する速度フィルター部を有する請求項1又は2に記載の推進装置。
【請求項4】
前記振動センサーは、前記軸線上に配置されている請求項1に記載の推進装置。
【請求項5】
前記振動センサーを収容し、前記回転軸の先端に取り付けられたカプセルをさらに有する請求項4に記載の推進装置。
【請求項6】
前記カプセルは、前記回転軸の先端に、該回転軸の回転方向とは反対の方向に螺旋状に旋回するネジによって締結固定されている請求項5に記載の推進装置。
【請求項7】
前記検知部は、前記回転軸の回転数を取得する回転数取得部をさらに有し、
前記フィルター部は、前記取得された回転数に基づいて、前記通過帯域を変化させることが可能である請求項1に記載の推進装置。
【請求項8】
機体と、
該機体に設けられた請求項1に記載の推進装置と、
を備える飛行体。
発明の詳細な説明
【技術分野】
【0001】
本開示は、推進装置、及び飛行体に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
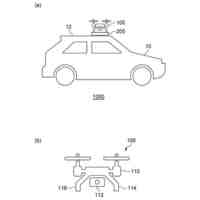
ドローンやマルチコプターに代表される飛行体が近年実用化されている。この種の飛行体は、機体と、機体に設けられた複数の推進装置と、を備える。推進装置は、電動機と、この電動機によって回転駆動される回転軸と、回転軸に設けられた回転翼と、回転翼を外周側から覆うダクトと、回転軸をダクトに対して回転可能に支持する軸受装置と、を有する。
【0003】
上記の飛行体では、経年運用に伴って各部に損耗等の異常を生じ、振動が発生する場合がある。下記特許文献1に係る装置では、軸受装置に振動センサーを設け、当該振動センサーによって軸受装置の部材ごとの異常状態を検知できるとされている。具体的には、振動センサーから取得した加速度の波形を周波数分析して、軸受装置の内輪、外輪、転動体の損傷周波数を逐一回転数から算出するといった手法が採用されている。
【先行技術文献】
【特許文献】
【0004】
特開2022-129900号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ここで、飛行体では、軸受装置のみならず、推進装置の回転軸や回転翼等の他の部材にも振動による影響が及ぶことがある。しかし、従来、軸受装置以外の異常状態を判別できる技術が提唱されてこなかった。
【0006】
本開示は上記課題を解決するためになされたものであって、より多くの種類の部品の異常を検知することが可能な推進装置、及び飛行体を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記課題を解決するために、本開示に係る推進装置は、軸線回りに回転可能な回転軸と、該回転軸を駆動する電動機と、該回転軸を回転可能に支持する軸受部と、前記回転軸に一体に設けられた回転翼と、前記軸受部を支持するダクトと、前記ダクトに対する前記回転軸、前記回転翼、及び前記軸受部の少なくとも1つを含む複数個所の振動による異常状態を検知可能な検知部と、を備え、前記検知部は、前記振動の加速度を取得する振動センサーと、前記振動の周波数を予め定められた通過帯域ごとに通過させるフィルター部と、前記通過帯域に基づいて、前記異常状態が生じている前記箇所を特定する異常特定部と、を有する。
【0008】
本開示に係る飛行体は、機体と、該機体に設けられた上記の推進装置と、を備える。
【発明の効果】
【0009】
本開示によれば、より多くの種類の部品の異常を検知することが可能な推進装置、及び飛行体を提供することができる。
【図面の簡単な説明】
【0010】
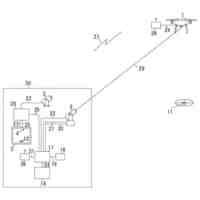
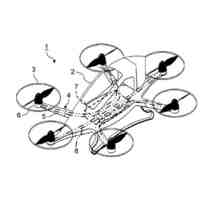
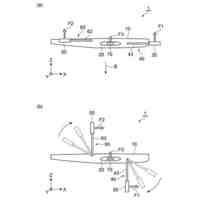
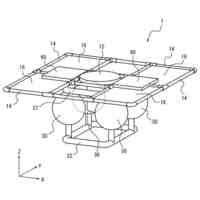
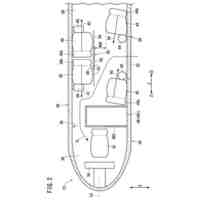
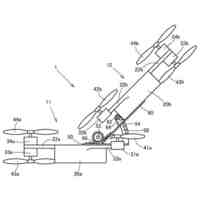
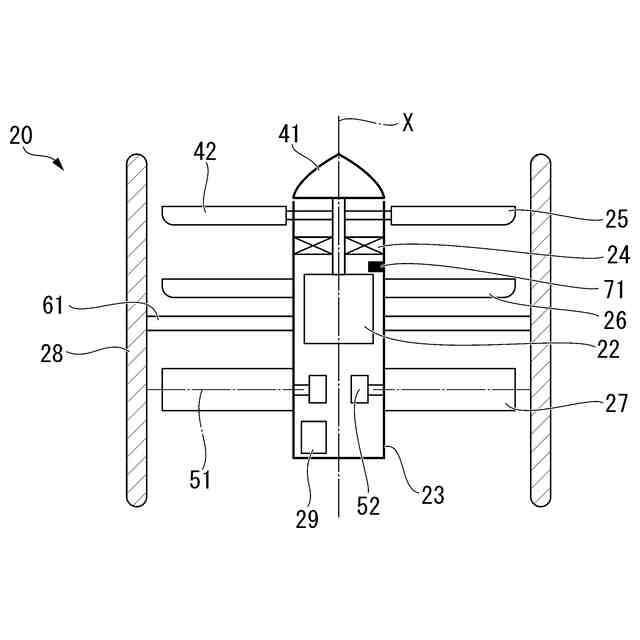
本開示の第一実施形態に係る飛行体の構成を示す平面模式図である。
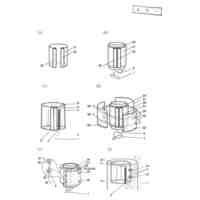
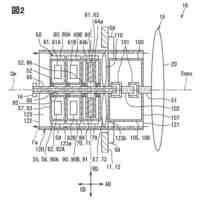
本開示の第一実施形態に係る推進装置の構成を示す縦断面図である。
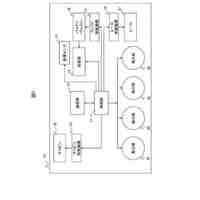
本開示の第一実施形態に係る検知部の機能ブロック図である。
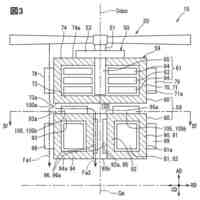
本開示の第二実施形態に係る推進装置の構成を示す要部拡大断面図である。
本開示の第三実施形態に係る検知部の機能ブロック図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
飛行体
5か月前
個人
ドローン係留装置
8か月前
株式会社三圓
浮上装置
9日前
個人
空港用貨物搬送車
4か月前
個人
ドローンの計測飛行方法
10か月前
個人
飛行艇
2か月前
個人
ドローンの計測操作方法3
15日前
個人
ドローンの計測操作方法2
15日前
個人
自由落下運航システム
6か月前
個人
人工衛星推進材循環エンジン
4か月前
個人
マルチコプター型電気飛行機
5か月前
キヤノン電子株式会社
磁気トルカ
1か月前
合同会社アドエア
飛行体落下補助装置
7か月前
株式会社中北製作所
羽ばたき装置
5か月前
株式会社中北製作所
羽ばたき装置
4か月前
株式会社SUBARU
電動航空機
4か月前
株式会社セネック
ドローンポート
3か月前
株式会社セネック
ドローンポート
3か月前
個人
飛行体
8か月前
河村電器産業株式会社
設備点検システム
10か月前
株式会社SUBARU
回転翼航空機
4か月前
国立大学法人九州大学
飛行体
6か月前
京セラ株式会社
発着装置
11か月前
CAPXLE株式会社
緊急避難用気球
10か月前
CAPXLE株式会社
緊急避難用気球
10か月前
CAPXLE株式会社
緊急避難用気球
10か月前
SkyDeer株式会社
衛星制御方法
6か月前
株式会社小糸製作所
航空機用灯具
1か月前
本田技研工業株式会社
移動体
1か月前
株式会社デンソー
推進装置
2か月前
本田技研工業株式会社
移動体
1か月前
株式会社JVCケンウッド
撮像システム
10か月前
株式会社デンソー
推進装置
8か月前
株式会社FINEMECH
連結型回転翼航空機
10か月前
株式会社SUBARU
構造体の製造方法
29日前
株式会社SUBARU
構造体の製造方法
26日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ