TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024125918
公報種別
公開特許公報(A)
公開日
2024-09-19
出願番号
2023034051
出願日
2023-03-06
発明の名称
プローブ校正方法、プログラム、制御装置及び測定装置
出願人
株式会社東京精密
代理人
個人
,
個人
,
個人
,
個人
主分類
G01B
5/00 20060101AFI20240911BHJP(測定;試験)
要約
【課題】プローブの自動校正における安全性及び操作性が確保される、プローブ校正方法、プログラム及び測定装置を提供する。
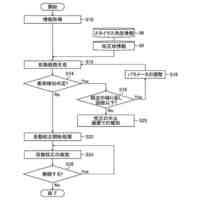
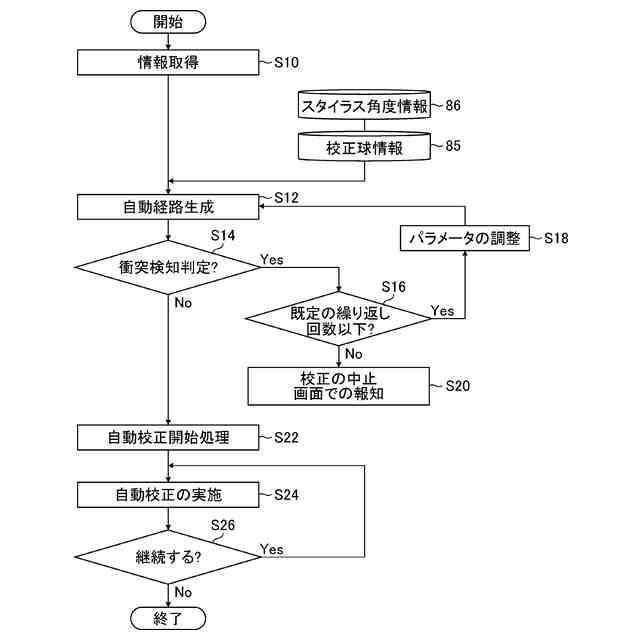
【解決手段】プローブ校正方法は、校正球構造体に関する校正球情報を取得し(S10)、プローブに関するプローブ情報を取得し(S10)、プローブを用いて校正球を測定する際にプローブが移動する校正経路を生成し(S12)、校正経路を移動するプローブが校正球構造体と衝突するか否かを判定し(S14)、プローブが前記校正球構造体と衝突しないと判定された校正経路を適用してプローブを移動させ、プローブを用いて校正球を測定する(S24)。
【選択図】図3
特許請求の範囲
【請求項1】
プローブを用いて校正球を測定し、前記校正球の測定結果に基づき前記プローブを校正するプローブ校正方法であって、
コンピュータが、
前記校正球が具備される校正球構造体に関する校正球情報を取得する校正球情報取得工程と、
前記プローブに関するプローブ情報を取得するプローブ情報取得工程と、
前記校正球情報及び前記プローブ情報を参照して、前記プローブを用いて前記校正球を測定する際に前記プローブが移動する校正経路を生成する校正経路生成工程と、
前記校正球情報及び前記プローブ情報を参照して、前記校正経路を移動する前記プローブが前記校正球構造体と衝突するか否かを判定する衝突検知判定工程と、
前記衝突検知判定工程において、前記プローブが前記校正球構造体と衝突しないと判定された前記校正経路を適用して前記プローブを移動させ、前記プローブを用いて前記校正球を測定する校正球測定工程と、
を実行するプローブ校正方法。
続きを表示(約 2,000 文字)
【請求項2】
前記コンピュータが、
前記衝突検知判定工程において、前記プローブが前記校正球構造体と衝突すると判定された場合に、前記校正経路を構成するプロービング目標点を規定するパラメータを調整するパラメータ調整工程を実行し、
前記衝突検知判定工程は、前記パラメータ調整工程において調整されたパラメータに基づき生成された前記校正経路について、前記プローブが前記校正球構造体と衝突するか否かを判定する請求項1に記載のプローブ校正方法。
【請求項3】
前記コンピュータが、
前記パラメータ調整工程の実施回数が規定の回数を超えるか否かを判定する調整回数判定工程と、
前記調整回数判定工程において、前記パラメータ調整工程の実施回数が規定回数を超えると判定された場合に、前記パラメータ調整工程の実施回数が規定回数を超えることを表す情報を報知する報知工程と、
を実行する請求項2に記載のプローブ校正方法。
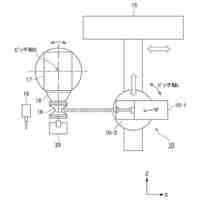
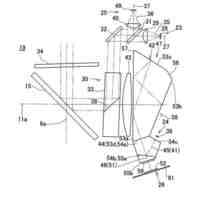
【請求項4】
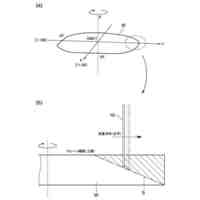
前記校正球構造体は、
前記校正球を先端に支持する校正球支持シャフトと、
前記校正球構造体が載置される載置面に対して立設させる校正球支持台であり、前記校正球支持シャフトの基端を支持する校正球支持台と、
を備え、
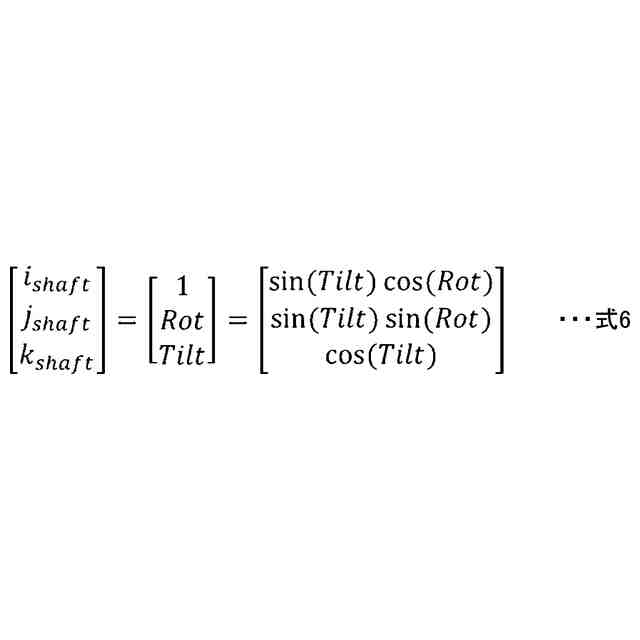
前記校正球情報取得工程は、前記校正球の半径、前記載置面に対して平行となる面における基準方向に対する前記校正球支持シャフトの回転角、前記載置面と直交する方向に対する前記校正球支持シャフトの倒れ角及び前記校正球支持シャフトの軸と直交する断面における最大長さを前記校正球情報として取得する請求項1に記載のプローブ校正方法。
【請求項5】
前記プローブは、前記校正球へ接触させる球形状の接触子を先端に支持するスタイラスを備え、
前記プローブ情報取得工程は、前記プローブに適用される基準面と直交する方向に対する前記スタイラスの倒れ角、前記基準面に対して平行となる面における基準方向に対する前記スタイラスの回転角及び前記接触子の半径を前記プローブ情報として取得する請求項1に記載のプローブ校正方法。
【請求項6】
前記プローブは、前記校正球へ接触させる球形状の接触子を先端に支持するスタイラスを備え、
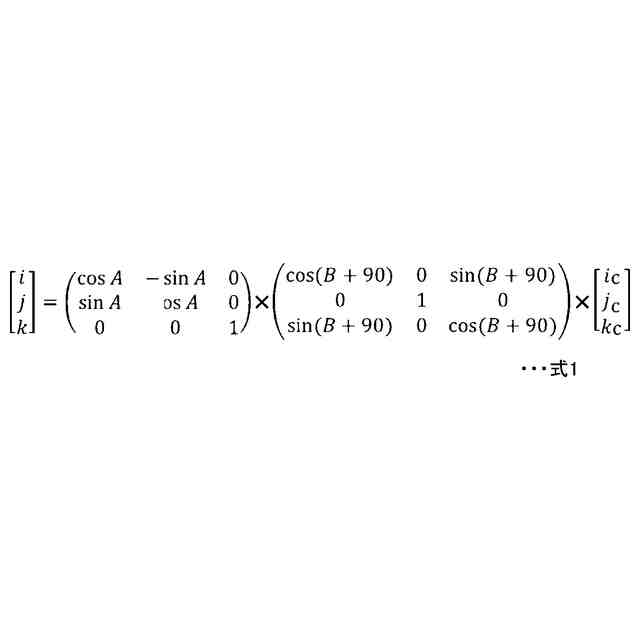
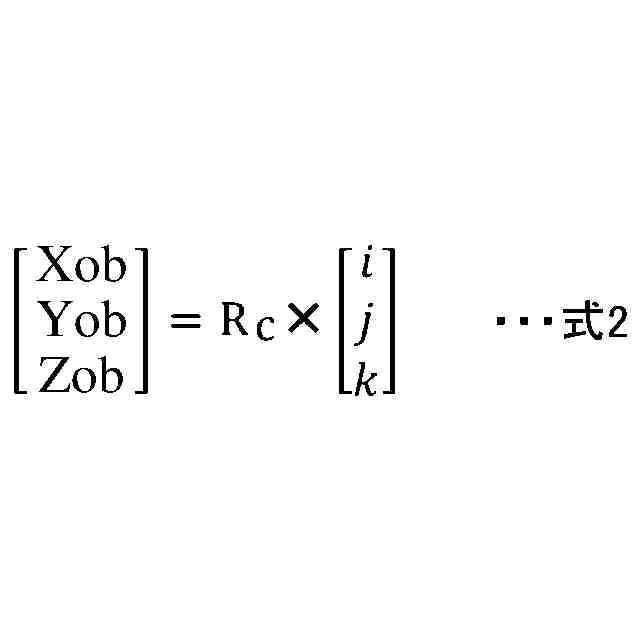
前記校正経路生成工程は、前記スタイラスの延びる方向を基準とするスタイラス基準座標系における前記校正経路を、前記プローブが具備される装置に適用されるマシン座標系へ変換する座標系変換工程を含む請求項1に記載のプローブ校正方法。
【請求項7】
前記衝突検知判定工程は、前記校正経路が前記校正球構造体と交差するか否かを判定し、前記校正経路が前記校正球構造体と交差すると判定される場合は、前記プローブが前記校正球構造体と衝突すると判定する請求項1に記載のプローブ校正方法。
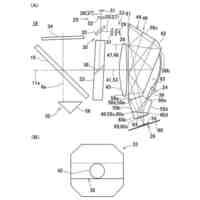
【請求項8】
前記プローブは、前記校正球へ接触させる球形状の接触子を先端に支持するスタイラスを備え、
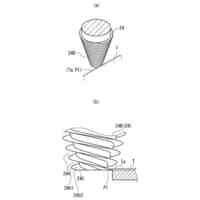
前記校正経路生成工程は、
前記校正経路において、前記接触子を前記校正球へ接触させて前記プローブが前記校正球を測定する第1プロービング目標点として、前記スタイラスが延びるスタイラス方向へ前記プローブを移動させて前記校正球と接触した位置を設定し、
前記校正経路において、前記接触子を前記校正球へ接触させて前記プローブが前記校正球を測定する第2プロービング目標点として、前記第1プロービング目標点と前記校正球の中心とを通る方向に対して直交する平面のうち、外周の長さが最大となる最大周長平面の前記外周における位置を設定する請求項1に記載のプローブ校正方法。
【請求項9】
前記校正経路生成工程は、
前記校正経路において前記接触子が通過する第1経路点として、前記第1プロービング目標点から延びる前記校正球の法線の方向に、前記校正球の中心から規定の第1距離を有する位置を設定し、
前記校正経路において前記接触子が通過する第2経路点として、前記第2プロービング目標点から延びる前記校正球の法線の方向に、前記校正球の中心から規定の第2距離を有する位置を設定する請求項8に記載のプローブ校正方法。
【請求項10】
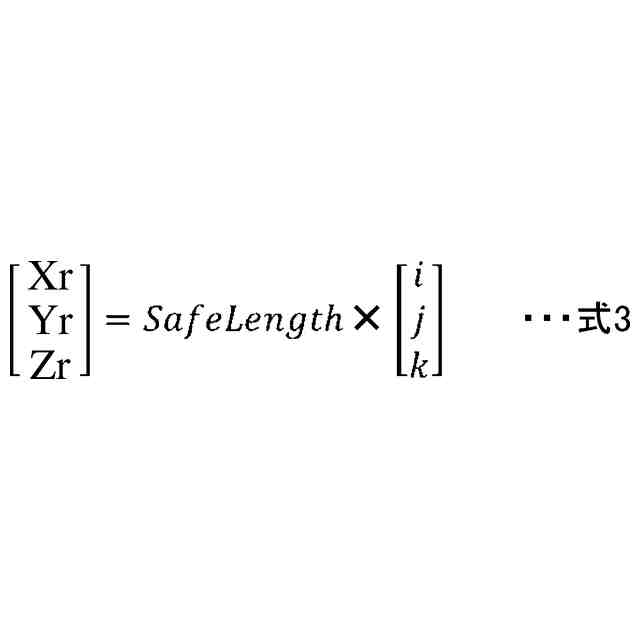
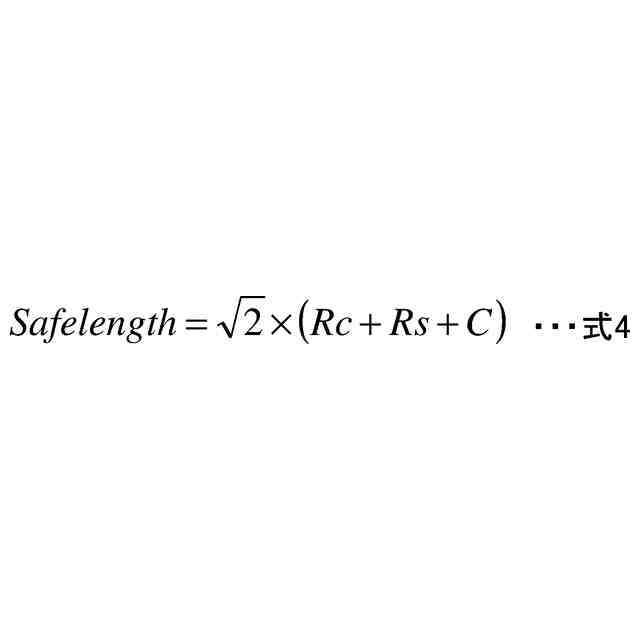
前記第1距離をLs1とし、前記第2距離をLs2とし、前記校正球の半径をRcとし、前記接触子の半径をRsとし、前記校正球の半径Rc及び前記接触子の半径Rsに基づき規定される第1安全距離をC1とする場合に、
前記第1距離Ls1は、Ls1=(Rc+Rs+C1)×2
1/2
と表され、
前記第2距離Ls2は、L2=(Rc+Rs+C1)×2
1/2
と表される請求項9に記載のプローブ校正方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、プローブ校正方法、プログラム、制御装置及び測定装置に関する。
続きを表示(約 1,100 文字)
【背景技術】
【0002】
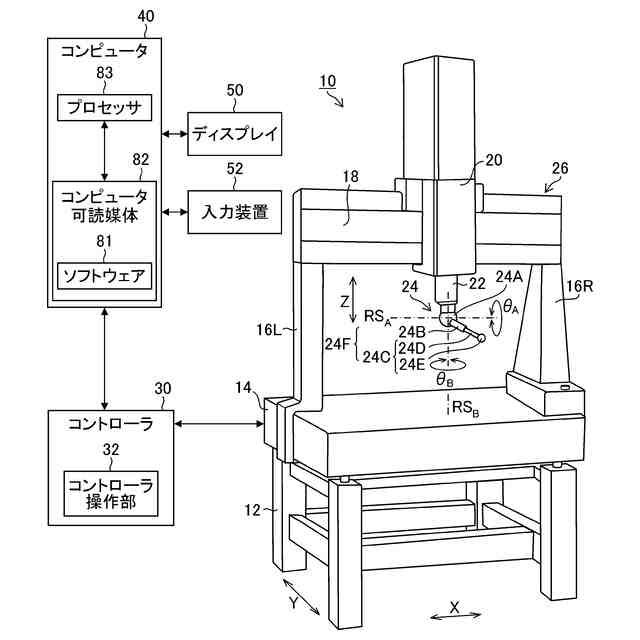
CMMの利用において、校正球が使用されるプローブの校正は、日常的に繰り返される基本的な操作の一つである。なお、CMMは、三次元測定機の英語表記Coordinate Measuring Machineの省略語である。
【0003】
一方、プローブの先端球であるチップの直径、及び先端球を支持するスタイラスの長さなどのプローブの仕様が変更される度に、校正球を測定する際の校正経路を、都度、ユーザが作成することは困難である。そのために、校正経路を自動で生成し、校正球が使用される校正が実施される機能を有するCMMが一般に普及している。
【0004】
特許文献1は、基準球を用いて接触式のプローブの校正を実施する三次元測定機が記載される。同文献に記載の装置は、主軸2の軸線に対してスタイラス軸線が平行であるストレート形のタッチプローブに対して、基準球が用いられる自動校正を実施する。
【先行技術文献】
【特許文献】
【0005】
特開2022-017057号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、従来技術において、プローブの校正に適用される校正経路を作成する際に、プローブと校正球との衝突が発生すると判定された場合に、校正経路のパラメータを手動で調整する必要がある。また、プローブと校正球との衝突が懸念される場合には、プローブの実際の動作を操作者が確認して衝突の可能性を判定し、衝突が発生すると判定された場合に稼働中の装置を手動で停止させる必要がある。
【0007】
すなわち、従来技術におけるプローブの自動校正では、安全性及び操作性について課題が存在する。安全性に関する課題として、プローブと校正球との衝突が起こり得る校正経路を適用して、装置を動作させてしまうことが挙げられる。また、操作性に関する課題として、校正経路を調整する際に、測定範囲等の校正経路のパラメータを操作者が調整しなければならないことが挙げられる。
【0008】
特許文献1には、上記した安全性に関する課題及び操作性に関する課題は記載及び示唆されていない。また、同文献には、上記した課題を解決する具体的な手法についての開示はない。
【0009】
本発明はこのような事情に鑑みてなされたもので、プローブの自動校正における安全性及び操作性が確保される、プローブ校正方法、プログラム及び測定装置を提供することを目的とする。
【課題を解決するための手段】
【0010】
上記目的を達成するために、次の発明態様を提供する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社東京精密
研削装置
8日前
株式会社東京精密
研削装置
8日前
株式会社東京精密
測定装置
今日
株式会社東京精密
測定装置
今日
株式会社東京精密
測定装置
今日
株式会社東京精密
測定装置
今日
株式会社東京精密
光路切替装置及び測定装置
15日前
株式会社東京精密
研磨装置の保持面加工方法
今日
株式会社東京精密
ウェハ保護テープ剥離装置
7日前
株式会社東京精密
半導体ウェーハ研削砥石装置
今日
株式会社東京精密
亀裂検出装置及びその診断方法
21日前
株式会社東京精密
ワークアライメント装置及び方法
今日
株式会社東京精密
研削砥石のツルーイング装置及び方法
18日前
株式会社東京精密
研削砥石のツルーイング装置及び方法
24日前
株式会社東京精密
研削砥石のツルーイング方法及びツルーイング装置
7日前
株式会社東京精密
加工装置、方法、及び、学習済みモデルの生成方法
24日前
株式会社東京精密
プローブ校正方法、プログラム、制御装置及び測定装置
8日前
株式会社東京精密
ウェーハの面取り加工方法及びそれに用いられる面取り装置
7日前
株式会社東京精密
搬送ユニット
9日前
株式会社東京精密
ブレード検出装置
7日前
株式会社東京精密
加工システム及び方法
17日前
株式会社東京精密
亀裂検出装置及び方法
24日前
日本精機株式会社
表示装置
今日
株式会社コロナ
石油ストーブ
7日前
個人
電気抵抗の測定方法
15日前
太陽誘電株式会社
センサ
3日前
株式会社ヨコオ
プローブ
今日
株式会社トプコン
測量装置
1か月前
太陽誘電株式会社
検出装置
18日前
株式会社トプコン
測量装置
7日前
株式会社トプコン
測量装置
1か月前
日本碍子株式会社
ガスセンサ
28日前
CKD株式会社
錠剤検査装置
22日前
北陽電機株式会社
光電センサ
14日前
株式会社キーエンス
超音波流量センサ
18日前
株式会社東芝
センサ
18日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ