TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024089401
公報種別
公開特許公報(A)
公開日
2024-07-03
出願番号
2022204745
出願日
2022-12-21
発明の名称
車両の制御装置
出願人
トヨタ自動車株式会社
代理人
弁理士法人高田・高橋国際特許事務所
主分類
B60W
30/16 20200101AFI20240626BHJP(車両一般)
要約
【課題】ドライバの運転嗜好値を簡便かつ適切に取得可能とする。
【解決手段】制御装置は、第1の関数を記憶する記憶装置とプロセッサとを備える。第1の関数は、複数ドライバの運転データに基づいて予め特定され、車間情報及び自車両速度に対する車間嗜好値の関係を示す。プロセッサは、ドライバによる手動運転での追従走行中に取得される車間情報及び自車両速度に応じたドライバの車間嗜好値を、第1の関数に従って算出する。プロセッサは、算出された車間嗜好値に基づいて、追従走行中の自車両の加速度、減速度、減速タイミング、及び加速タイミングのうちの少なくとも1つについてのドライバの嗜好を示す残りの運転嗜好値を算出する。プロセッサは、算出された残りの運転嗜好値に基づいて、ドライバの乗車中の自動運転における加速度、減速度、減速タイミング、及び加速タイミングのうちの少なくとも1つの制御目標値を算出する。
【選択図】図4
特許請求の範囲
【請求項1】
手動運転と自動運転とを切り替え可能な自車両を制御する制御装置であって、
複数ドライバの運転データに基づいて予め特定され、車間情報及び自車両速度に対する車間嗜好値の関係を示す第1の関数を記憶する記憶装置と、
プロセッサと、
を備え、
前記車間情報は、先行車に対する前記自車両の車間時間又は車間距離であり、
前記車間嗜好値は、前記車間情報についてのドライバの嗜好を示し、
前記プロセッサは、
前記ドライバによる前記手動運転での追従走行中に取得される前記車間情報及び前記自車両速度に応じた前記ドライバの前記車間嗜好値を、前記第1の関数に従って算出し、
算出された前記車間嗜好値に基づいて、前記追従走行中の前記自車両の加速度、減速度、減速タイミング、及び加速タイミングのうちの少なくとも1つについての前記ドライバの嗜好を示す残りの運転嗜好値を算出し、
算出された前記残りの運転嗜好値に基づいて、前記ドライバの乗車中の前記自動運転における前記加速度、前記減速度、前記減速タイミング、及び前記加速タイミングのうちの前記少なくとも1つの制御目標値を算出する目標値算出処理を実行する
車両の制御装置。
続きを表示(約 1,600 文字)
【請求項2】
前記記憶装置は、
前記複数ドライバの運転データに基づいて予め特定され、先行車速度と前記自車両速度との相対速度、前記加速度、及び前記車間情報に対する加速度嗜好値の関係を示す第2の関数と、
前記複数ドライバの運転データ、前記第1の関数、及び前記第2の関数に基づいて予め特定され、前記車間嗜好値に対する前記加速度嗜好値の関係を示す第3の関数と、
を記憶し、
前記加速度嗜好値は、前記残りの運転嗜好値の1つであり、
前記プロセッサは、
前記車間嗜好値に応じた前記加速度嗜好値を前記第3の関数に従って算出し、
前記目標値算出処理において、前記第3の関数に従って算出された前記加速度嗜好値と前記相対速度と前記車間情報とに応じた前記加速度の目標値を、前記第2の関数に従って前記制御目標値として算出する
請求項1に記載の車両の制御装置。
【請求項3】
前記記憶装置は、
前記複数ドライバの運転データに基づいて予め特定され、先行車速度と前記自車両速度との相対速度、前記減速度、及び前記車間情報に対する減速度嗜好値の関係を示す第4の関数と、
前記複数ドライバの運転データ、前記第1の関数、及び前記第4の関数に基づいて予め特定され、前記車間嗜好値に対する前記減速度嗜好値の関係を示す第5の関数と、
を記憶し、
前記減速度嗜好値は、前記残りの運転嗜好値の1つであり、
前記プロセッサは、
前記車間嗜好値に応じた前記減速度嗜好値を前記第5の関数に従って算出し、
前記目標値算出処理において、前記第5の関数に従って算出された前記減速度嗜好値と前記相対速度と前記車間情報とに応じた前記減速度の目標値を、前記第4の関数に従って前記制御目標値として算出する
請求項1に記載の車両の制御装置。
【請求項4】
前記記憶装置は、
前記複数ドライバの運転データに基づいて予め特定され、先行車速度と前記自車両速度との相対速度、前記減速タイミング、及び前記車間情報に対する減速タイミング嗜好値の関係を示す第6の関数と、
前記複数ドライバの運転データ、前記第1の関数、及び前記第6の関数に基づいて予め特定され、前記車間嗜好値に対する前記減速タイミング嗜好値の関係を示す第7の関数と、
を記憶し、
前記減速タイミング嗜好値は、前記残りの運転嗜好値の1つであり、
前記プロセッサは、
前記車間嗜好値に応じた前記減速タイミング嗜好値を前記第7の関数に従って算出し、
前記目標値算出処理において、前記第7の関数に従って算出された前記減速タイミング嗜好値と前記相対速度と前記車間情報とに応じた前記減速タイミングの目標値を、前記第6の関数に従って前記制御目標値として算出する
請求項1に記載の車両の制御装置。
【請求項5】
前記記憶装置は、
前記複数ドライバの運転データに基づいて予め特定され、先行車速度と前記自車両速度との相対速度、前記加速タイミング、及び前記車間情報に対する加速タイミング嗜好値の関係を示す第8の関数と、
前記複数ドライバの運転データ、前記第1の関数、及び前記第8の関数に基づいて予め特定され、前記車間嗜好値に対する前記加速タイミング嗜好値の関係を示す第9の関数と、
を記憶し、
前記加速タイミング嗜好値は、前記残りの運転嗜好値の1つであり、
前記プロセッサは、
前記車間嗜好値に応じた前記加速タイミング嗜好値を前記第9の関数に従って算出し、
前記目標値算出処理において、前記第9の関数に従って算出された前記加速タイミング嗜好値と前記相対速度と前記車間情報とに応じた前記加速タイミングの目標値を、前記第8の関数に従って前記制御目標値として算出する
請求項1に記載の車両の制御装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、手動運転と自動運転とを切り替え可能な車両の制御装置に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
特許文献1は、車両の自動走行制御装置を開示している。自動走行制御装置は、ドライバによる手動運転中に、車両の運転方法に関するドライバの嗜好をドライバ毎に学習する。そして、自動走行制御装置は、当該学習の結果に基づいて車両走行を制御する。
【先行技術文献】
【特許文献】
【0003】
特開平07-108849号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
自動運転での追従走行に対してドライバの運転嗜好をより適切に反映させるためには、より多くの自動運転パラメータ(車間時間、及び加速度など)を対象として複数の運転嗜好値を取得することが望ましい。そして、運転嗜好の取得対象のドライバの手動運転中に、そのような複数の運転嗜好値を簡便に学習して取得できることが求められる。
【0005】
本開示は、上述のような課題に鑑みてなされたものであり、先行車に対する自車両の追従走行に関するドライバの運転嗜好値を簡便かつ適切に取得できるようにした車両の制御装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
本開示に係る車両の制御装置は、手動運転と自動運転とを切り替え可能な自車両を制御する制御装置であって、第1の関数を記憶する記憶装置と、プロセッサと、を備える。第1の関数は、複数ドライバの運転データに基づいて予め特定され、車間情報及び自車両速度に対する車間嗜好値の関係を示す。車間情報は、先行車に対する自車両の車間時間又は車間距離である。車間嗜好値は、車間情報についてのドライバの嗜好を示す。プロセッサは、ドライバによる手動運転での追従走行中に取得される車間情報及び自車両速度に応じたドライバの車間嗜好値を、第1の関数に従って算出する。プロセッサは、算出された車間嗜好値に基づいて、追従走行中の自車両の加速度、減速度、減速タイミング、及び加速タイミングのうちの少なくとも1つについてのドライバの嗜好を示す残りの運転嗜好値を算出する。そして、プロセッサは、算出された残りの運転嗜好値に基づいて、ドライバの乗車中の自動運転における加速度、減速度、減速タイミング、及び加速タイミングのうちの少なくとも1つの制御目標値を算出する目標値算出処理を実行する。付け加えると、第1の関数は、機械学習を用いて特定されてもよい。
【発明の効果】
【0007】
本開示によれば、先行車に対する自車両の追従走行に関するドライバの運転嗜好値を簡便かつ適切に取得できるようになる。
【図面の簡単な説明】
【0008】
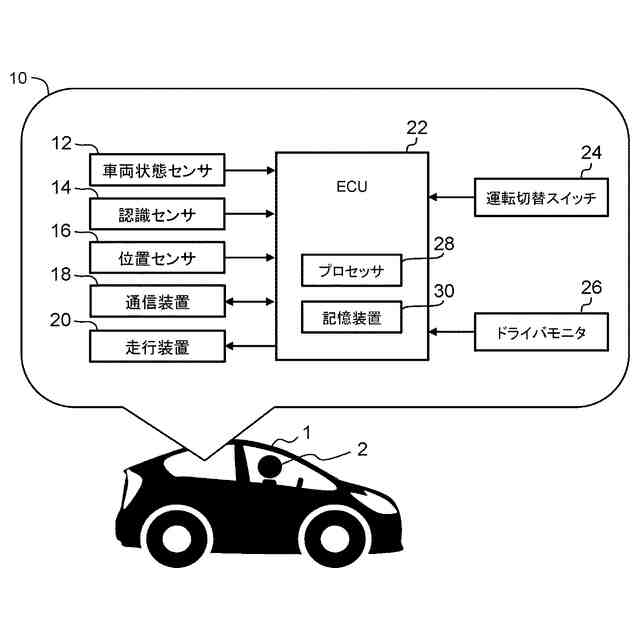
実施の形態に係る車両の構成の一例を概略的に示す図である。
実施の形態で用いられる車間情報を説明するための図である。
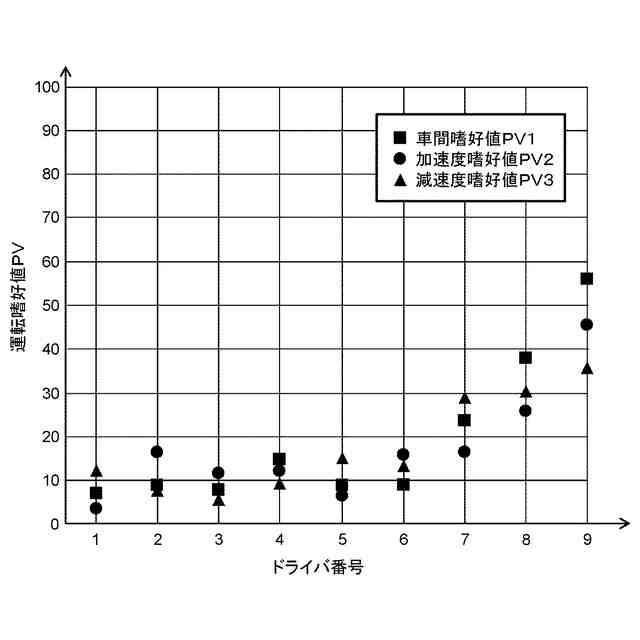
各運転嗜好値PVの関係をドライバ毎に表したグラフである。
実施の形態に係る車両走行制御に関連する処理の一例を示すフローチャートである。
【発明を実施するための形態】
【0009】
添付図面とともに、本開示の実施の形態について説明する。
【0010】
1.車両の構成
図1は、実施の形態に係る車両1の構成の一例を概略的に示す図である。車両1は、車両制御システム10を備えている。車両制御システム10は、車両1に搭載され、車両1の走行を制御する。車両制御システム10は、車両状態センサ12、認識センサ14、位置センサ16、通信装置18、走行装置20、電子制御ユニット(ECU)22、運転切替スイッチ24、及びドライバモニタ26を含む。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
他の特許を見る



 特許ウォッチ
特許ウォッチ