TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024086176
公報種別
公開特許公報(A)
公開日
2024-06-27
出願番号
2022201170
出願日
2022-12-16
発明の名称
動作予測システム、動作予測方法、プログラム
出願人
日本電気株式会社
代理人
個人
,
個人
主分類
B25J
11/00 20060101AFI20240620BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
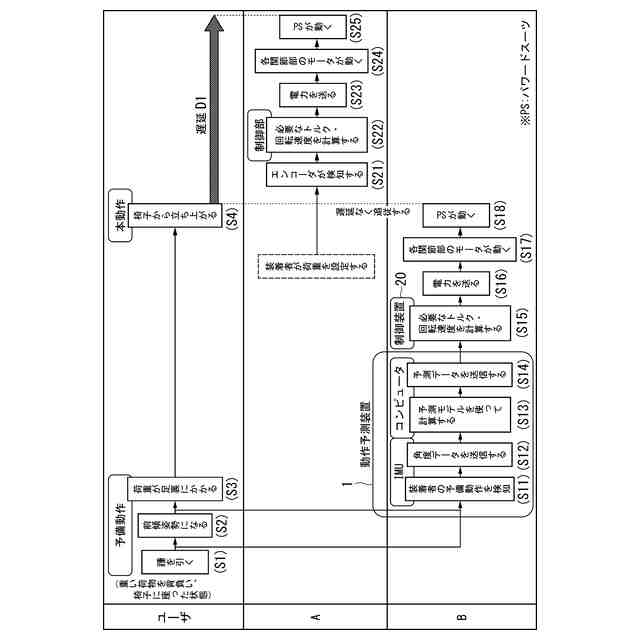
【課題】人などの動作の予測対象の動作に基づいて所定の制御対象を制御する際に、その制御対象の制御タイミングが適切となるように動作の予測対象の当該動作をできるだけ早く、かつより高精度に予測することのできる動作予測システム、動作予測方法、プログラムを提供する。
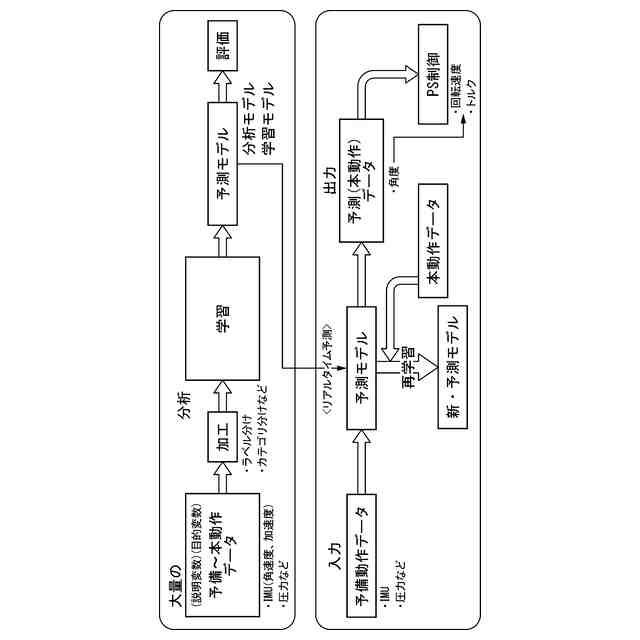
【解決手段】対象の動きとして定義された本動作の前に当該対象が行う予備動作中の当該対象の状態を示す状態情報を取得する。対象の予備動作中における状態情報と、対象の本動作における状態情報と、の関係を学習して生成された本動作予測モデルを用いて、予備動作の後の本動作における予測の状態情報を算出する。
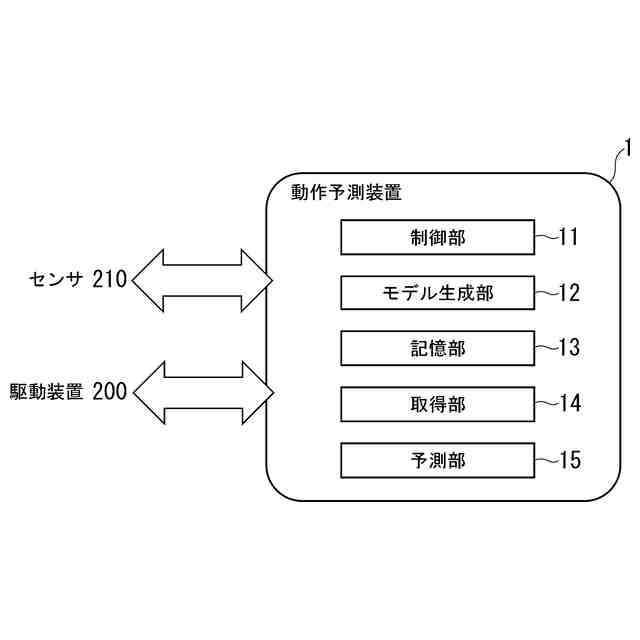
【選択図】図1
特許請求の範囲
【請求項1】
対象の動きとして定義された本動作の前に当該対象が行う予備動作中の当該対象の状態を示す状態情報を取得する取得手段と、
前記対象の前記予備動作中における状態情報と本動作予測モデルを用いて、前記予備動作の後の前記本動作における予測の状態情報を算出する予測手段と、
を備える動作予測システム。
続きを表示(約 1,000 文字)
【請求項2】
前記対象の動きを補助する駆動装置の指令値を前記予測の状態情報を用いて算出し、前記駆動装置へ出力する制御手段と、
を備える請求項1に記載の動作予測システム。
【請求項3】
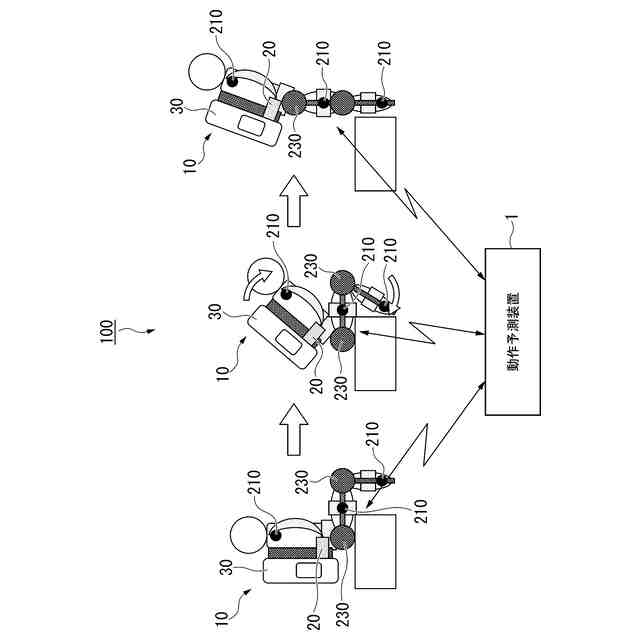
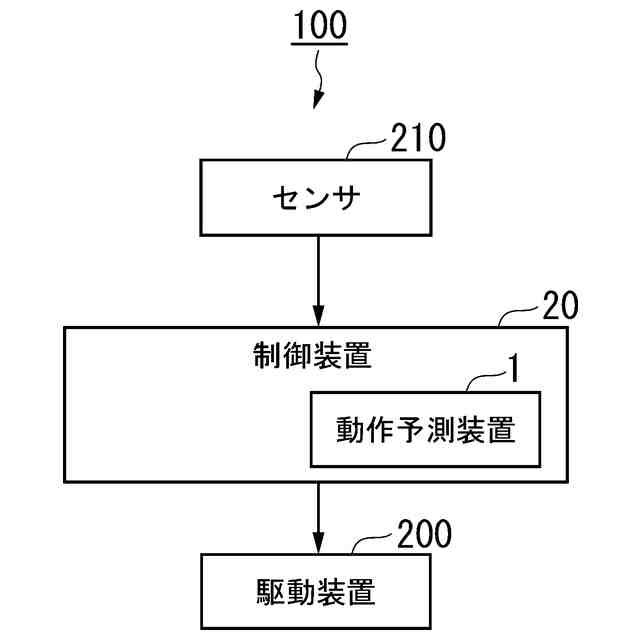
前記状態情報は、前記対象が装着して当該対象の動きを補助するパワードスーツに設けられたセンサの検知した情報であり、
前記制御手段は、前記パワードスーツに設けられた駆動装置に前記指令値を出力する
請求項2に記載の動作予測システム。
【請求項4】
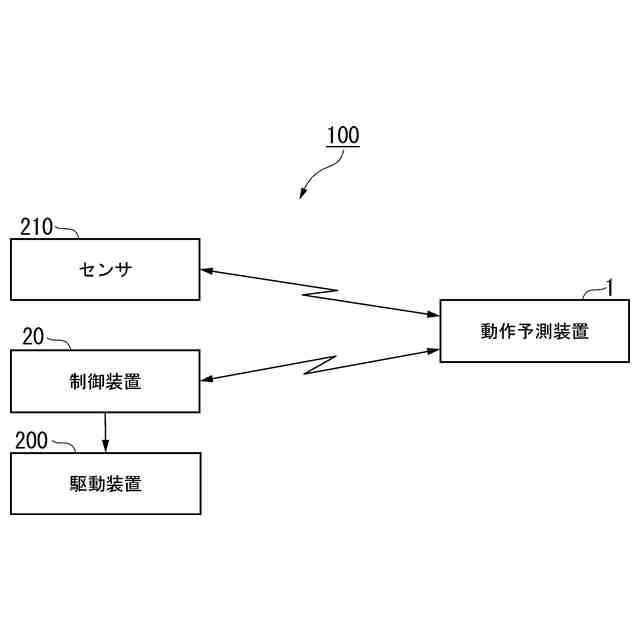
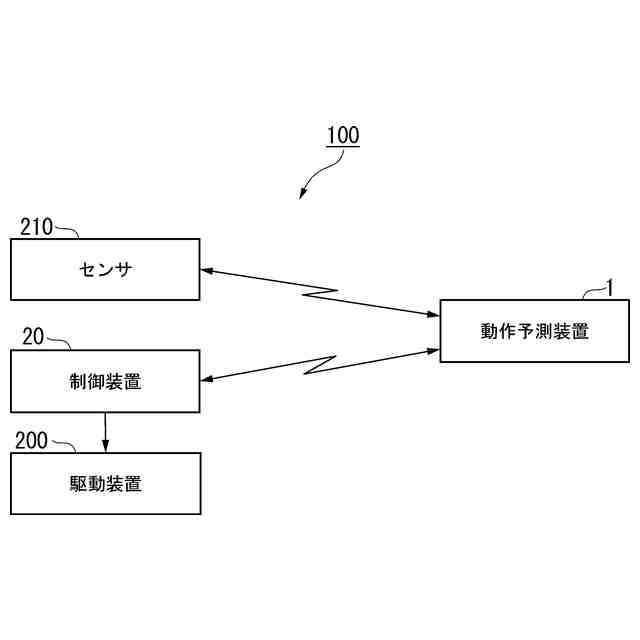
前記状態情報は、前記対象の動作をセンシングするセンサの検知した情報であり、
前記制御手段は、通信接続した遠隔装置に設けられた駆動装置に前記指令値を出力する
請求項2に記載の動作予測システム。
【請求項5】
前記状態情報は、前記対象の動作をセンシングするセンサの検知した情報であり、
前記制御手段は、通信接続した情報処理装置であって前記対象の動作に基づいて情報処理を行う情報処理装置に前記指令値を出力する
請求項2に記載の動作予測システム。
【請求項6】
前記状態情報は、前記センサにより検知された情報を加工した情報を含む請求項3から請求項5の何れか一項に記載の動作予測システム。
【請求項7】
前記対象の前記予備動作中における状態情報と、前記対象の前記本動作における前記状態情報と、の関係を学習して前記本動作予測モデルを生成するモデル生成手段と、
を備える請求項1から請求項5の何れか一項に記載の動作予測システム。
【請求項8】
対象の動きとして定義された本動作の前に当該対象が行う予備動作中の当該対象の状態を示す状態情報を取得し、
前記対象の前記予備動作中における状態情報と本動作予測モデルを用いて、前記予備動作の後の前記本動作における予測の状態情報を算出する
動作予測方法。
【請求項9】
動作予測システムのコンピュータを、
対象の動きとして定義された本動作の前に当該対象が行う予備動作中の当該対象の状態を示す状態情報を取得する取得手段、
前記対象の前記予備動作中における状態情報と本動作予測モデルを用いて、前記予備動作の後の前記本動作における予測の状態情報を算出する予測手段、
として機能させるプログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、動作予測システム、動作予測方法、プログラムに関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
人などの対象の動作を予測する技術が求められている。例えば、人が装着して人の動作に必要な力を軽減するパワードスーツがある。パワードスーツにおいて人が動作する際に発生する力を補助するタイミングが適切となるように、人の動作を予測することが求められる場合がある。また遠隔の装置などを人が操作する場合に、当該遠隔の装置や仮想空間のアバターの動きのタイミングが、人の動作と合うように人の動作を予測することが求められる場合がある。
【0003】
特許文献1には、歩行障害支援装置の技術が開示されており、人の運動症状に伴う歩行障害の発現予兆を事前に検出する。
【先行技術文献】
【特許文献】
【0004】
国際公開第2018/066151号
【発明の概要】
【発明が解決しようとする課題】
【0005】
人などの動作の予測対象の動作に基づいて所定の制御対象を制御する際に、その制御対象の制御タイミングが適切となるように動作の予測対象の当該動作をできるだけ早く予測する技術が求められている。
【0006】
そこでこの発明は、上述の課題を解決する動作予測システム、動作予測方法、プログラムを提供することを目的としている。
【課題を解決するための手段】
【0007】
発明の第一の態様によれば、動作予測システムは、対象の動きとして定義された本動作の前に当該対象が行う予備動作中の当該対象の状態を示す状態情報を取得する取得手段と、前記対象の前記予備動作中における状態情報と本動作予測モデルを用いて、前記予備動作の後の前記本動作における予測の状態情報を算出する予測手段と、を備える。
【0008】
発明の第二の態様によれば、動作予測方法は、対象の動きとして定義された本動作の前に当該対象が行う予備動作中の当該対象の状態を示す状態情報を取得し、前記対象の前記予備動作中における状態情報と本動作予測モデルを用いて、前記予備動作の後の前記本動作における予測の状態情報を算出する。
【0009】
発明の第三の態様によれば、プログラムは、動作予測システムのコンピュータを、対象の動きとして定義された本動作の前に当該対象が行う予備動作中の当該対象の状態を示す状態情報を取得する取得手段、前記対象の前記予備動作中における状態情報と本動作予測モデルを用いて、前記予備動作の後の前記本動作における予測の状態情報を算出する予測手段、として機能させる。
【発明の効果】
【0010】
本発明によれば、人などの動作の予測対象の動作に基づいて所定の制御対象を制御する際に、その制御対象の制御タイミングが適切となるように動作の予測対象の当該動作をできるだけ早く予測することができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
木製ハンマー
1か月前
個人
関節モジュール
27日前
個人
寸切りボルト回し
23日前
個人
スロットルトリガー
1か月前
日東精工株式会社
搬送装置
5か月前
中国電力株式会社
腰袋
4か月前
太陽工業株式会社
チャック装置
10日前
株式会社ツノダ
挟持工具
6か月前
コクヨ株式会社
補助器具
17日前
株式会社ツノダ
挟持工具
7か月前
日東工器株式会社
動力工具
1か月前
川崎重工業株式会社
ハンド
7か月前
日東工器株式会社
衝撃工具
3か月前
日東工器株式会社
動力工具
1か月前
日東工器株式会社
動力工具
1か月前
日東工器株式会社
動力工具
1か月前
株式会社右川ゴム製造所
把持装置
6か月前
個人
メンテナンス用スタンド
2か月前
学校法人立命館
グリッパ
6か月前
トヨタ自動車株式会社
ロボット
1か月前
川崎重工業株式会社
罫書用治具
3か月前
オムロン株式会社
電動把持工具
16日前
学校法人立命館
ロボットハンド
6か月前
CKD株式会社
把持装置
1か月前
株式会社マキタ
動力工具
4か月前
東京計器株式会社
接触検知装置
1か月前
学校法人立命館
グリッパ
1か月前
個人
プーリーキー抜き治具
6か月前
株式会社ダイヘン
搬送装置
4か月前
個人
回転工具およびバリ取り部品
1か月前
株式会社ダイヘン
搬送装置
4か月前
個人
容器引っ掛け棒およびその使用方法
2か月前
トヨタ自動車株式会社
ハンド構造
3か月前
株式会社ハーモ
開閉チャック装置
2か月前
白山工業株式会社
ロボットアーム
1か月前
川崎重工業株式会社
ロボット
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ


































