TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024079863
公報種別
公開特許公報(A)
公開日
2024-06-12
出願番号
2021061474
出願日
2021-03-31
発明の名称
触媒交換用無人搬送装置、触媒交換システム、及び触媒交換方法
出願人
株式会社日本触媒
代理人
IBC一番町弁理士法人
主分類
B01J
8/02 20060101AFI20240605BHJP(物理的または化学的方法または装置一般)
要約
【課題】無人搬送車に運搬され作業装置の停止位置の精度を向上させることができる触媒交換用無人搬送装置、触媒交換システム、及び触媒交換方法を提供する。
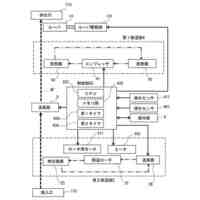
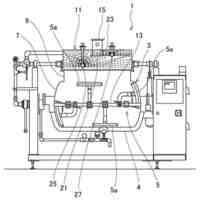
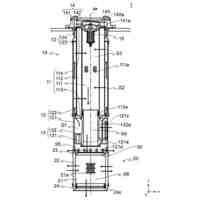
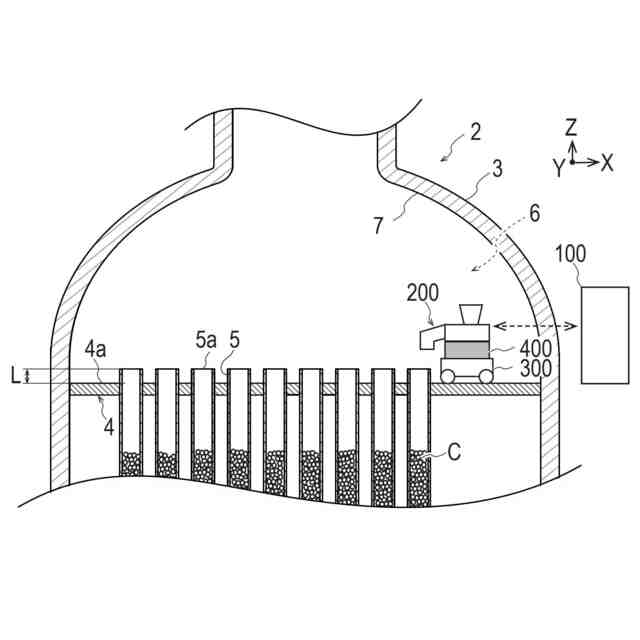
【解決手段】触媒交換用無人搬送装置400は、多管式反応器2の管板面4a若しくは管板面上の部材、及び/又は反応管の開口部5aを撮影可能な撮影部410、作業装置200の位置及び/又は向きを変更可能なX-Y-θテーブル420、作業装置の位置及び/又は向きを制御する制御部430を備える。撮影部は、所定の位置に誘導され停止している状態で管板面若しくは部材、及び/又は反応管の開口部を撮影し、制御部は、画像から得られた情報と予め取得した情報を比較して基準管5Kを認識し、基準管の位置に基づいて自己位置を認識し、自己位置と作業対象となる反応管5Aの位置の間の位置ずれ量を計算し、位置ずれ量に基づいてX-Y-θテーブルを稼働させる。
【選択図】図2
特許請求の範囲
【請求項1】
多管式反応器の触媒交換作業における作業装置を運搬するために自律走行する無人搬送車に積載及び/又は牽引される装置であって、
前記多管式反応器の管板面若しくは前記管板面に設置された部材、及び/又は反応管の開口部を撮影可能な撮影部と、
前記作業装置の位置及び/又は向きを変更可能であり、かつ前記作業装置を積載するX-Y-θテーブルと、
前記作業装置の位置及び/又は向きを制御する制御部と、を備え、
前記撮影部は、所定の位置に誘導された後に、停止している状態で、前記管板面若しくは前記部材、及び/又は前記反応管の開口部を撮影し、
前記制御部は、撮影した画像から得られた情報と前記制御部が予め取得した情報を比較することによって、少なくとも1つの基準となる反応管を認識し、
前記制御部は、前記基準となる反応管の位置に基づいて、前記無人搬送車及び/又は前記作業装置の自己位置を認識し、
前記制御部は、前記自己位置と作業対象となる反応管の位置との間の位置ずれ量を計算し、
前記制御部は、前記位置ずれ量に基づいて前記X-Y-θテーブルを稼働させることを特徴とする、触媒交換用無人搬送装置。
続きを表示(約 4,100 文字)
【請求項2】
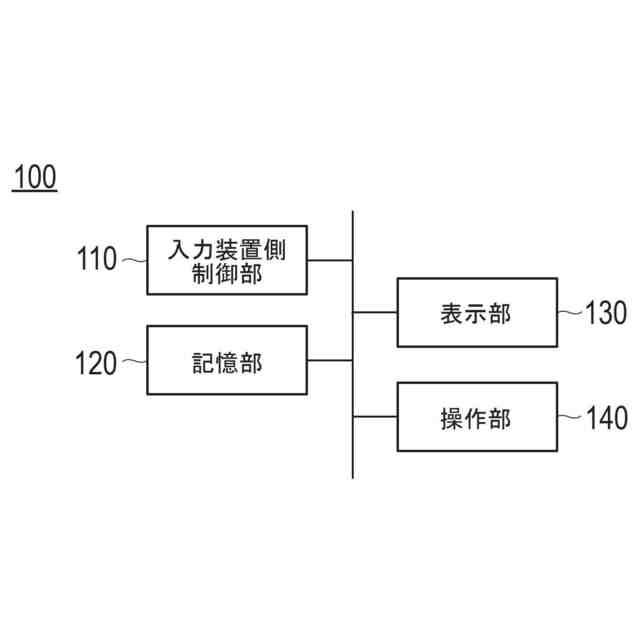
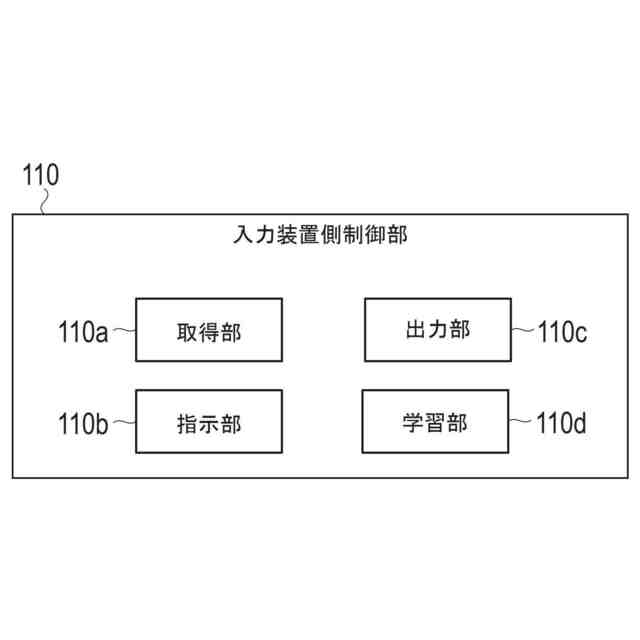
多管式反応器の管板面又は前記管板面に設置された部材に設けられ、多管式反応器内における作業区画の位置の情報、前記作業区画内の反応管の位置及び/又は配列の情報、前記作業区画内に設けられるマーキングの位置の情報、前記マーキングの位置に基づいて基準となる反応管の位置を決定するための情報を取得する取得部と、決定された前記基準となる反応管と作業対象となる反応管の位置関係の情報に基づいて前記作業対象となる反応管を指示する指示部と、を備える入力装置と、
前記多管式反応器の触媒交換作業を実施可能な作業装置と、
前記作業装置を前記指示部が指示した前記反応管が存在する前記作業区画の付近に誘導する誘導手段を備え、前記作業装置を運搬するために自律走行する無人搬送車と、
前記管板面若しくは前記部材、及び/又は前記反応管の開口部を撮影可能な撮影部と、前記作業装置の位置及び/又は向きを変更可能であり、かつ前記作業装置を積載するX-Y-θテーブルと、前記作業装置の位置及び/又は向きを制御する制御部と、を備える触媒交換用無人搬送装置と、を備え、
前記触媒交換用無人搬送装置は、前記無人搬送車に積載及び/又は牽引され、
前記撮影部は、前記触媒交換用無人搬送装置が所定の位置に誘導された後に、停止している状態で、前記管板面若しくは前記部材、及び/又は前記反応管の開口部を撮影し、
前記制御部は、撮影された画像から得られた前記反応管の位置及び/又は配列の情報、並びに前記マーキングの位置の情報と、前記取得部が取得した情報と、を比較することによって、少なくとも1つの前記基準となる反応管を認識し、
前記制御部は、前記基準となる反応管の位置に基づいて、前記無人搬送車及び/又は前記作業装置の自己位置を認識し、
前記制御部は、前記基準となる反応管の位置と前記指示部が指示した情報により、前記作業対象となる反応管の位置を認識し、前記自己位置と前記作業対象となる反応管の位置との間の位置ずれ量を計算し、
前記制御部は、前記位置ずれ量に基づいて前記X-Y-θテーブルを稼働させることを特徴とする、触媒交換システム。
【請求項3】
多管式反応器の触媒交換作業を実施可能な作業装置と、
前記作業装置を作業対象となる反応管が存在する前記作業区画の付近に誘導する誘導手段を備え、前記作業装置を運搬するために自律走行する無人搬送車と、
前記多管式反応器の管板面若しくは前記管板面に設置された部材及び/又は反応管の開口部を撮影可能な撮影部と、前記作業装置の位置及び/又は向きを変更可能であり、かつ前記作業装置を積載するX-Y-θテーブルと、前記作業装置の位置及び/又は向きを制御する制御部と、を備え、前記無人搬送車に積載及び/又は牽引される触媒交換用無人搬送装置と、を用いた方法であって、
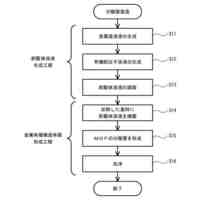
前記管板面又は前記反応管の位置に穴が設けられ、前記管板面に設置された前記部材を、任意の方法によって前記作業区画に区分けし、前記作業区画の各々にマーキングを施す工程と、
前記無人搬送車が、前記作業対象となる反応管が存在する前記作業区画の多管式反応器内における位置に関する第1情報、前記作業対象となる反応管が存在する前記作業区画内の前記反応管の位置及び/又は配列に関する第2情報、前記作業対象となる反応管が存在する前記作業区画内に設けられる前記マーキングの位置に関する第3情報、前記マーキングの位置に基づいて基準となる反応管の位置を決定するための第4情報、前記基準となる反応管と前記作業対象となる反応管の位置関係の第5情報を取得し、前記第1情報に基づいて前記誘導手段により前記作業装置を所定の位置に誘導する工程と、
前記触媒交換用無人搬送装置が、前記所定の位置に誘導された後に、停止している状態で、前記管板面若しくは前記部材及び/又は前記反応管の開口部を撮影する工程と、
前記制御部が撮影された画像から少なくとも1つの前記マーキングを検知する工程と、
前記制御部が前記画像から検知された前記マーキングから前記マーキングの位置に関する第6情報を認識し、前記第6情報と前記第2情報及び前記第3情報とを比較することによって、前記画像から前記作業区画内の前記反応管の位置及び/又は配列に関する第7情報を認識する工程と、
前記制御部が前記第4情報を基に前記画像から少なくとも1つの基準となる反応管の位置に関する第8情報を認識する工程と、
前記制御部が、前記第8情報と前記第7情報を基に、前記無人搬送車及び/又は前記作業装置の自己位置に関する第9情報を認識する工程と、
前記制御部が、前記第8情報と前記第5情報を比較することによって、前記画像から前記作業対象となる反応管の位置に関する第10情報を認識する工程と、
前記制御部が、前記第9情報と前記第10情報を基に、前記自己位置と前記作業対象となる反応管の位置との間の位置ずれ量を計算する工程と、
前記制御部が前記位置ずれ量に基づいて前記X-Y-θテーブルを稼働させる工程と、を含む、触媒交換方法。
【請求項4】
前記管板面又は前記部材を前記作業区画に区分けする際に、
前記管板面又は前記部材は、形状及び大きさが略同一となる前記作業区画が少なくとも2つ以上存在するように区分けされることを特徴とする、請求項3に記載の触媒交換方法。
【請求項5】
前記管板面又は前記部材を前記作業区画に区分けする際に、
前記作業区画の各々は、前記管板面又は前記部材の全体を平面視したときに周期的に配置されることを特徴とする、請求項4に記載の触媒交換方法。
【請求項6】
前記管板面又は前記部材を前記作業区画に区分けする際に、
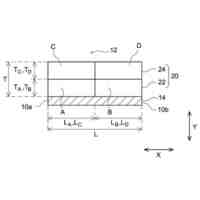
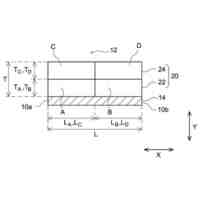
前記管板面又は前記部材は、式(1)を満たす前記作業区画の各々の総面積が、前記管板面又は前記部材の総面積の20%以上となるように区分けされることを特徴とし、
前記式(1)において、Aは、一の前記作業区画に独立して設けられる複数の作業領域の中で最も大きな前記作業領域の外周部に存在する複数の前記反応管のうち、前記反応管の中心同士の直線距離が最も長くなるように選択した、一の前記反応管の中心と他の前記反応管の中心との間の距離を示し、
Bは、前記X-Y-θテーブルのうちX-Yテーブルを稼働することによって前記作業装置が作業可能となる範囲に存在する複数の作業点のうち、前記作業点同士の直線距離が最も長くなるように選択した、一の前記作業点と他の前記作業点との間の距離を示し、
σは、平坦である環境において、前記所定の位置に停止している前記無人搬送車を中心として半径1mの円を設定し、
前記円の円周上に前記円の中心から45°毎に8か所の停止位置を設定し、
前記触媒交換用無人搬送装置を積載及び/又は牽引した無人搬送車を設定された前記停止位置の各々に前記円の中心から3回ずつ合計24回移動させたときに計測される、前記触媒交換用無人搬送装置が実際に停止した位置と設定された前記停止位置とのずれ量の標準偏差を示す、請求項4または5に記載の触媒交換方法。
JPEG
2024079863000003.jpg
8
161
【請求項7】
前記マーキングは、文字、数字、記号、図形、線からなる形状要素群、及び該形状要素の色、前記作業区画内の位置、前記作業区画内の配置数からなる構成要素群から選択された要素によって構成され、
前記作業区画に前記マーキングを施す方法は、前記作業区画の形状及び大きさ毎に予め決定されることを特徴とする、請求項4~6のいずれか1項に記載の触媒交換方法。
【請求項8】
前記マーキングは、文字、数字、記号、図形、線からなる形状要素群、及び前記形状要素の色、前記作業区画内の位置、前記作業区画内の配置数からなる構成要素群から選択された要素によって構成され、
前記作業区画の各々に施される前記マーキングの各々は、前記管板面又は前記部材の全体を平面視したときに周期的に配置されることを特徴とする、請求項4~6のいずれか1項に記載の触媒交換方法。
【請求項9】
前記マーキングは、文字、数字、記号、図形、線からなる形状要素群、及び前記形状要素の色、前記作業区画内の位置、前記作業区画内の配置数からなる構成要素から選択された要素によって構成され、
前記マーキングは、前記形状要素が非対称性を含む、及び/又は前記マーキングの配置数が2以上であるという特徴の少なくとも一つ以上を備え、
前記制御部は、前記画像から前記マーキングを検知する際に、前記マーキングを構成する前記要素を前記マーキングの種類に関する第11情報としてさらに認識し、
前記制御部は、前記第11情報により、前記触媒交換用無人搬送装置の向きを検知することを特徴とする、請求項7または8に記載の触媒交換方法。
【請求項10】
前記マーキングは、文字、数字、記号、図形、線からなる形状要素群、及び前記形状要素の色、前記作業区画内の位置、前記作業区画内の配置数からなる構成要素群から選択された要素によって構成され、
前記マーキングは、独自性を含むことを特徴とし、
前記制御部は、前記画像から前記マーキングを検知する際に、前記マーキングを構成する前記要素を前記マーキングの種類に関する第11情報としてさらに認識し、
前記制御部は、前記第11情報に基づいて前記作業区画を識別可能に構成されることを特徴とする、請求項7~9のいずれか1項に記載の触媒交換方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、多管式反応器内を走行可能な無人搬送車に積載/牽引される触媒交換用無人搬送装置、該装置を用いた触媒交換システム、及び該装置を用いた触媒交換方法に関する。
続きを表示(約 2,800 文字)
【背景技術】
【0002】
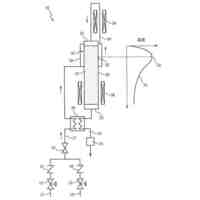
石油化学工業の分野において、多管式反応器を用いた炭化水素類の分解反応、改質反応、酸化反応、アンモ酸化反応、還元反応等の接触反応は数多く実施されている。多管式反応器は、下記特許文献1に示すように、管板と該管板に接続された複数の反応管を備えている。
【0003】
多管式反応器は、反応管に触媒を充填し、反応管に気体/液体を流通させることによって接触反応を起こしている。反応管に充填された触媒は、経年により性能が低下するため、定期的に触媒を抜き出して交換する必要があり、その際反応管に充填された触媒の量を調整する必要がある。これらの作業(触媒交換作業)は、例えば、多管式反応器の内部に入った作業員が触媒交換作業を実施するための作業装置を用いて実施することができる。
【先行技術文献】
【特許文献】
【0004】
特開2002-301355号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、多管式反応器には数千から数万本の反応管が配設されているため、作業員が作業装置を運搬して触媒交換作業を実施する方法では、多くの時間や人員を必要とする。そのため、作業効率を向上させることができる装置の開発や、触媒交換システム及び触媒交換方法の構築が要望されている。
【0006】
本発明者らは、多管式反応器の触媒交換作業に関する従来技術に鑑み、他の方法によって触媒をより効率的に交換できないか鋭意検討した。そして、本発明者らは、自律走行する無人搬送車に作業装置を運搬させることによって触媒交換作業が自動化され、作業効率が向上するのではないかと着想した。
【0007】
また、本発明者らは、無人搬送車を用いて作業装置を運搬する場合に、作業装置の停止位置(言い換えれば、作業装置の作業開始位置)の誤差が無人搬送車の停止位置の誤差に依存することに着目した。触媒交換作業として、例えば反応管に触媒を充填する工程を実施する場合、作業装置(充填機)の作業部分である充填口のサイズは、反応管の開口部分のサイズと同程度であるか、やや小さい場合が多いため、作業装置の停止位置の誤差が大きいと触媒が反応管の外に零れたり、作業装置と反応管との間に詰まったりすることによって作業不良が生じる可能性が高くなる。そのため、本発明者らは、作業装置の停止位置の精度が無人搬送車の停止位置の精度より向上する(作業装置の停止位置の誤差を小さくする)方法を鋭意検討した。そして、本発明者らは、無人搬送車に積載及び/又は牽引され、作業装置を積載可能な触媒交換用無人搬送装置を開発し、無人搬送車が所定の位置に誘導された後に触媒交換用無人搬送装置が作業装置の位置及び/又は向きを変更することによって作業装置を予め設定された作業位置に適正に移動させることを支援するシステム及び方法を構築し、本発明を完成するに至った。
【0008】
すなわち、本発明は、多管式反応器の内部を自律走行する無人搬送車に運搬され、触媒交換作業における作業装置の停止位置の精度を向上させることができる触媒交換用無人搬送装置、触媒交換システム、及び触媒交換方法を提供することを目的とする。
【課題を解決するための手段】
【0009】
本発明の一の形態に係る触媒交換用無人搬送装置は、多管式反応器の触媒交換作業における作業装置を運搬するために自律走行する無人搬送車に積載及び/又は牽引される装置であって、前記多管式反応器の管板面若しくは前記管板面に設置された部材、及び/又は反応管の開口部を撮影可能な撮影部と、前記作業装置の位置及び/又は向きを変更可能であり、かつ前記作業装置を積載するX-Y-θテーブルと、前記作業装置の位置及び/又は向きを制御する制御部と、を備え、前記撮影部は、所定の位置に誘導された後に、停止している状態で、前記管板面若しくは前記部材、及び/又は前記反応管の開口部を撮影し、前記制御部は、撮影した画像から得られた情報と前記制御部が予め取得した情報を比較することによって、少なくとも1つの基準となる反応管を認識し、前記制御部は、前記基準となる反応管の位置に基づいて、前記無人搬送車及び/又は前記作業装置の自己位置を認識し、前記制御部は、前記自己位置と作業対象となる反応管の位置との間の位置ずれ量を計算し、前記制御部は、前記位置ずれ量に基づいて前記X-Y-θテーブルを稼働させることを特徴とする。
【0010】
本発明の一の形態に係る触媒交換システムは、多管式反応器の管板面又は前記管板面に設置された部材に設けられ、多管式反応器内における作業区画の位置の情報、前記作業区画内の反応管の位置及び/又は配列の情報、前記作業区画内に設けられるマーキングの位置の情報、前記マーキングの位置に基づいて基準となる反応管の位置を決定するための情報を取得する取得部と、決定された前記基準となる反応管と作業対象となる反応管の位置関係の情報に基づいて前記作業対象となる反応管を指示する指示部と、を備える入力装置と、前記多管式反応器の触媒交換作業を実施可能な作業装置と、前記作業装置を前記指示部が指示した前記反応管が存在する前記作業区画の付近に誘導する誘導手段を備え、前記作業装置を運搬するために自律走行する無人搬送車と、前記管板面若しくは前記部材、及び/又は前記反応管の開口部を撮影可能な撮影部と、前記作業装置の位置及び/又は向きを変更可能であり、かつ前記作業装置を積載するX-Y-θテーブルと、前記作業装置の位置及び/又は向きを制御する制御部と、を備える触媒交換用無人搬送装置と、を備え、前記触媒交換用無人搬送装置は、前記無人搬送車に積載及び/又は牽引され、前記撮影部は、前記触媒交換用無人搬送装置が所定の位置に誘導された後に、停止している状態で、前記管板面若しくは前記部材、及び/又は前記反応管の開口部を撮影し、前記制御部は、撮影された画像から得られた前記反応管の位置及び/又は配列の情報、並びに前記マーキングの位置の情報と、前記取得部が取得した情報と、を比較することによって、少なくとも1つの前記基準となる反応管を認識し、前記制御部は、前記基準となる反応管の位置に基づいて、前記無人搬送車及び/又は前記作業装置の自己位置を認識し、前記制御部は、前記基準となる反応管の位置と前記指示部が指示した情報により、前記作業対象となる反応管の位置を認識し、前記自己位置と前記作業対象となる反応管の位置との間の位置ずれ量を計算し、前記制御部は、前記位置ずれ量に基づいて前記X-Y-θテーブルを稼働させることを特徴とする。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
株式会社日本触媒
分散剤
4日前
株式会社日本触媒
制振材用樹脂組成物
19日前
株式会社日本触媒
増粘剤、及び、樹脂組成物
4日前
株式会社日本触媒
吸水性樹脂組成物、およびその製造方法
19日前
株式会社日本触媒
生分解性ポリエステル系樹脂、およびその製造方法
16日前
戸田建設株式会社
コンクリートのブリーディング水抑制方法
8日前
株式会社日本触媒
新規エマルション及びこのエマルションを用いた塗料用組成物
8日前
東ソー株式会社
ろ過フィルター
15日前
個人
油フィルタおよび油ろ過装置
16日前
東レ株式会社
分離膜エレメントブロック
1日前
東ソー株式会社
二酸化炭素分離用組成物
23日前
株式会社フクハラ
圧縮空気除湿装置
25日前
三洋化成工業株式会社
二酸化炭素濃縮装置
4日前
トヨタ自動車株式会社
DACシステム
9日前
ヤマシンフィルタ株式会社
フィルタ装置
25日前
国立大学法人広島大学
分離膜の製造方法
8日前
アイリスオーヤマ株式会社
除湿装置
8日前
株式会社キャタラー
排ガス浄化用触媒
16日前
株式会社キャタラー
排ガス浄化用触媒
16日前
株式会社キャタラー
排ガス浄化用触媒
16日前
株式会社キャタラー
排ガス浄化用触媒
16日前
株式会社キャタラー
排ガス浄化用触媒
16日前
株式会社カジワラ
攪拌装置及び洗浄方法
23日前
東ソー株式会社
金属含有ゼオライトおよびそれを含む触媒
15日前
東芝ライテック株式会社
流体処理装置
8日前
セイコーエプソン株式会社
光触媒装置
26日前
株式会社日本触媒
吸水性樹脂組成物、およびその製造方法
19日前
ヤマシンフィルタ株式会社
フィルタ装置及び濾過装置
4日前
東レ株式会社
オレフィン製造方法およびオレフィン製造装置
22日前
日本特殊陶業株式会社
反応装置
19日前
東レ株式会社
分離膜、分離膜モジュールおよび膜分離システム
25日前
兵庫県公立大学法人
酸素還元触媒
15日前
三菱重工業株式会社
排ガスの浄化方法
4日前
セイコーエプソン株式会社
集塵装置の制御方法
29日前
太平洋セメント株式会社
流体ノズル
1か月前
東京濾器株式会社
二酸化炭素吸着剤
23日前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ