TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024078927
公報種別
公開特許公報(A)
公開日
2024-06-11
出願番号
2022191550
出願日
2022-11-30
発明の名称
作業機械、及び、作業機械を制御するための方法
出願人
株式会社小松製作所
代理人
弁理士法人新樹グローバル・アイピー
主分類
B60T
7/12 20060101AFI20240604BHJP(車両一般)
要約
【課題】作業機械において、慣性制動力の不足、或いは変動に関わらず、安定した制動力を得る。
【解決手段】作業機械は、駆動源と、トランスミッションと、走行装置と、ブレーキ装置と、コントローラとを備える。トランスミッションは、駆動源に接続される。走行装置は、トランスミッションに接続され、作業機械を走行させる。ブレーキ装置は、走行装置を制動する。コントローラは、作業機械を制動するための制動指令を取得する。コントローラは、制動指令に基づいて作業機械の慣性走行時における目標制動力を決定する。コントローラは、トランスミッションからの慣性制動力と、ブレーキ装置による補助制動力とによって目標制動力が得られるように、補助制動力を決定する。コントローラは、トランスミッションが過回転状態であるかを判定する。コントローラは、トランスミッションが過回転状態であると判定した場合には、補助制動力を増大させる。
【選択図】図5
特許請求の範囲
【請求項1】
作業機械であって、
駆動源と、
前記駆動源に接続されるトランスミッションと、
前記トランスミッションに接続され、前記作業機械を走行させる走行装置と、
前記走行装置を制動するブレーキ装置と、
コントローラと、
を備え、
前記コントローラは、
前記作業機械を制動するための制動指令を取得し、
前記制動指令に基づいて前記作業機械の慣性走行時における目標制動力を決定し、
前記トランスミッションからの慣性制動力と、前記ブレーキ装置による補助制動力とによって前記目標制動力が得られるように、前記補助制動力を決定し、
前記トランスミッションが過回転状態であるかを判定し、
前記トランスミッションが前記過回転状態であると判定した場合には、前記補助制動力を増大させる、
作業機械。
続きを表示(約 1,800 文字)
【請求項2】
前記コントローラは、
前記作業機械の車速を取得し、
前記車速が第1閾値以上である場合に、前記トランスミッションが過回転状態であると判定して、前記補助制動力を増大させる、
請求項1に記載の作業機械。
【請求項3】
前記トランスミッションは、係合状態と非係合状態とに切り替え可能なクラッチを含み、
前記トランスミッションは、前記クラッチが前記係合状態で、前記走行装置へ駆動力を伝達し、前記クラッチが前記非係合状態で、前記走行装置への駆動力を遮断し、
前記コントローラは、
前記車速が第1閾値以上である場合に、前記トランスミッションが第1過回転状態であると判定して、前記補助制動力を増大させ、
前記車速が前記第1閾値より大きい第2閾値以上である場合に、前記トランスミッションが第2過回転状態であると判定して、前記クラッチを前記非係合状態に切り換える、
請求項1に記載の作業機械。
【請求項4】
前記トランスミッションは、係合状態と非係合状態とに切り替え可能なクラッチを含み、
前記トランスミッションは、前記クラッチが、前記係合状態で前記走行装置へ駆動力を伝達し、前記クラッチが、前記非係合状態で前記走行装置への駆動力を遮断し、
前記コントローラは、
前記車速が所定の閾値以上である場合に、前記トランスミッションが過回転状態であると判定して、前記クラッチを前記非係合状態に切り換え、
前記車速が前記所定の閾値以上である場合に、前記補助制動力を増大させる、
請求項1に記載の作業機械。
【請求項5】
前記コントローラは、
前記トランスミッションの状態を示すトランスミッション情報を取得し、
前記トランスミッション情報に基づいて前記トランスミッションからの前記慣性制動力を算出し、
前記目標制動力と前記慣性制動力との差分に基づいて、前記ブレーキ装置による前記補助制動力を決定する、
請求項1に記載の作業機械。
【請求項6】
前記目標制動力を設定するためにオペレータによって操作可能な設定装置をさらに備え、
前記コントローラは、前記設定装置の操作に応じた前記制動指令を取得する、
請求項1に記載の作業機械。
【請求項7】
前記ブレーキ装置は、油圧式ブレーキであり、
前記コントローラによって制御されることで前記ブレーキ装置への第1油圧を変更する自動ブレーキ弁をさらに備え、
前記コントローラは、前記目標制動力と前記慣性制動力との差分に応じて前記ブレーキ装置への前記第1油圧を変更するように、前記自動ブレーキ弁を制御する、
請求項5に記載の作業機械。
【請求項8】
前記ブレーキ装置による制動力を調整するためにオペレータによって操作可能なブレーキ操作部材と、
前記ブレーキ操作部材の操作に応じて前記ブレーキ装置への第2油圧を変更する手動ブレーキ弁と、
前記自動ブレーキ弁からの前記第1油圧と、前記手動ブレーキ弁からの前記第2油圧とを選択的に前記ブレーキ装置に供給するシャトル弁と、
をさらに備える請求項7に記載の作業機械。
【請求項9】
前記シャトル弁は、前記第1油圧と前記第2油圧とのうち大きい方を前記ブレーキ装置に供給する、
請求項8に記載の作業機械。
【請求項10】
駆動源と、前記駆動源に接続されるトランスミッションと、前記トランスミッションに接続され、前記作業機械を走行させる走行装置と、前記走行装置を制動するブレーキ装置と、を備える作業機械を制御するための方法であって、
前記作業機械を制動するための制動指令を取得することと、
前記制動指令に基づいて前記作業機械の慣性走行時における目標制動力を決定することと、
前記トランスミッションからの慣性制動力と、前記ブレーキ装置による補助制動力とによって前記目標制動力が得られるように、前記補助制動力を決定することと、
前記トランスミッションが過回転状態であるかを判定することと、
前記トランスミッションが前記過回転状態であると判定した場合には、前記補助制動力を増大させること、
を備える方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業機械、及び、作業機械を制御するための方法に関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
作業機械には、トランスミッションを備えるものがある。オペレータがアクセルペダルを操作していない場合には、トランスミッションからの慣性制動力によって、作業機械に制動力が作用する。例えば、特許文献1の作業機械は、HST(Hydro Static Transmission)を備えている。HSTは、油圧ポンプと油圧モータとを備えている。HSTでは、油圧ポンプと油圧モータとエンジンとの内部負荷により、慣性制動力が発生する。オペレータは、このような慣性制動力を利用することで、作業機械の車速を調整する。
【先行技術文献】
【特許文献】
【0003】
国際公開第2021/066019号
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、トランスミッションからの慣性制動力には限界がある。そのため、例えば降坂時などに、トランスミッションからの慣性制動力では、必要な制動力に対して不足する場合がある。また、トランスミッションの状態に応じて、慣性制動力が変化する場合もある。そのため、慣性制動力によって作業機械の車速を安定して調整することは困難である。本開示の目的は、作業機械において、慣性制動力の不足、或いは変動に関わらず、安定した制動力を得ることにある。
【課題を解決するための手段】
【0005】
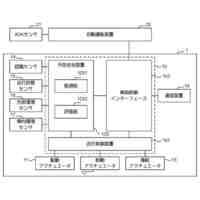
本開示の一態様に係る作業機械は、駆動源と、トランスミッションと、走行装置と、ブレーキ装置と、コントローラとを備える。トランスミッションは、駆動源に接続される。走行装置は、トランスミッションに接続され、作業機械を走行させる。ブレーキ装置は、走行装置を制動する。コントローラは、作業機械を制動するための制動指令を取得する。コントローラは、制動指令に基づいて作業機械の慣性走行時における目標制動力を決定する。コントローラは、トランスミッションからの慣性制動力と、ブレーキ装置による補助制動力とによって目標制動力が得られるように、補助制動力を決定する。コントローラは、トランスミッションが過回転状態であるかを判定する。コントローラは、トランスミッションが過回転状態であると判定した場合には、補助制動力を増大させる。
【0006】
本開示の他の態様に係る方法は、作業機械を制御するための方法である。作業機械は、駆動源と、トランスミッションと、走行装置と、ブレーキ装置とを備える。トランスミッションは、駆動源に接続される。走行装置は、トランスミッションに接続され、作業機械を走行させる。ブレーキ装置は、走行装置を制動する。当該方法は、作業機械を制動するための制動指令を取得することと、制動指令に基づいて作業機械の慣性走行時における目標制動力を決定することと、トランスミッションからの慣性制動力と、ブレーキ装置による補助制動力とによって目標制動力が得られるように、補助制動力を決定することと、トランスミッションが過回転状態であるかを判定することと、トランスミッションが過回転状態であると判定した場合には、補助制動力を増大させること、を備える。
【発明の効果】
【0007】
本開示によれば、トランスミッションからの慣性制動力と、ブレーキ装置による補助制動力とによって目標制動力が得られるように、補助制動力決定される。そのため、慣性制動力が目標制動力に対して不足する場合に、ブレーキ装置による制動力によって、不足分が補われる。また、慣性制動力が変動しても、目標制動力が決定されることで、安定した制動力が得られる。それにより、作業機械において、慣性制動力の不足、或いは変動に関わらず、安定した制動力が得られる。また、トランスミッションが過回転状態であると判定された場合には、補助制動力が増大される。それにより、例えば降坂時において、制動指令によって設定された目標制動力では、必要な制動力に不足する場合には、補助制動力が増大されることで、作業機械が減速される。
【図面の簡単な説明】
【0008】
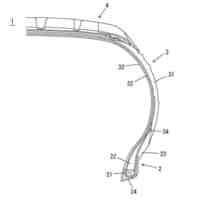
実施形態に係る作業機械の側面図である。
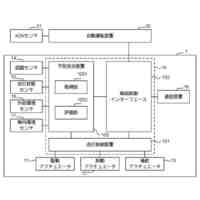
作業機械の構成を示すブロック図である。
作業機械の駆動力特性の一例を示す図である。
ブレーキ装置を駆動するための油圧回路の構成を示す図である。
自動ブレーキ制御の処理を示すフローチャートである。
第1レベルの目標制動力の一例を示す図である。
第2レベルの目標制動力の一例を示す図である。
第3レベルの目標制動力の一例を示す図である。
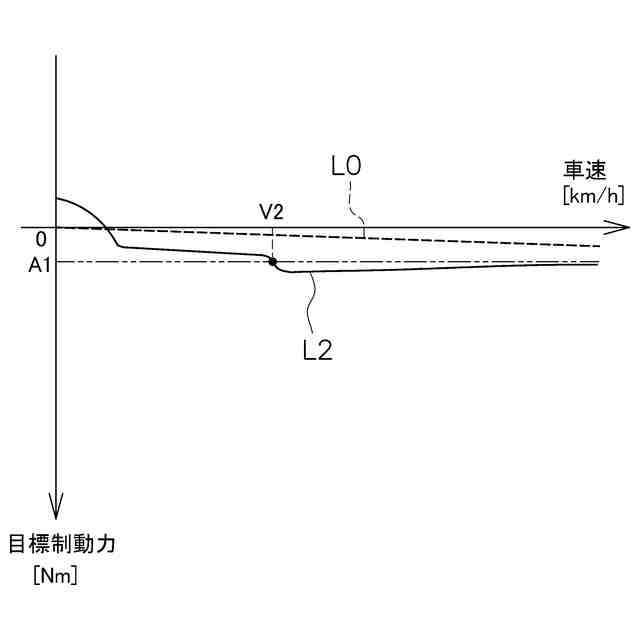
トランスミッションが過回転状態での制動力の一例を示す図である。
変形例に係る自動ブレーキ制御の処理を示すフローチャートである。
変形例に係る自動ブレーキ制御でのトランスミッションが過回転状態での制動力の一例を示す図である。
【発明を実施するための形態】
【0009】
以下、図面を参照して、本開示の一実施形態について説明する。図1は、実施形態に係る作業機械1の側面図である。図2は、作業機械1の構成を示すブロック図である。本実施形態において、作業機械1は、ホイールローダである。図1に示すように、作業機械1は、車体2と作業機3とを備えている。
【0010】
車体2は、前車体2aと後車体2bとを含む。後車体2bは、前車体2aに対して左右に旋回可能に接続されている。前車体2aと後車体2bとには、油圧シリンダ15が連結されている。油圧シリンダ15が伸縮することで、前車体2aが、後車体2bに対して、左右に旋回する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
東レ株式会社
車両用エアバッグ
7日前
豊田合成株式会社
車両
7日前
豊田合成株式会社
車両
7日前
豊田合成株式会社
乗員保護装置
3日前
個人
ブレーキ踏み間違い救済システム
7日前
ダイハツ工業株式会社
搭載構造
今日
ダイハツ工業株式会社
搭載構造
今日
個人
加速抑制機能付アクセルペダル装置
21日前
トヨタ自動車株式会社
車両
18日前
トヨタ自動車株式会社
車両
18日前
トヨタ自動車株式会社
車両
18日前
トヨタ自動車株式会社
車両
18日前
トヨタ自動車株式会社
車両
18日前
ダイハツ工業株式会社
ドア防水構造
7日前
日本プラスト株式会社
内装材
3日前
豊田合成株式会社
ガラスラン
7日前
トヨタ自動車株式会社
電動車両
7日前
株式会社小糸製作所
乗物用灯具
3日前
トヨタ自動車株式会社
電動車両
18日前
東海興業株式会社
ウェザーストリップ
22日前
株式会社アイシン
スタビライザ制御装置
3日前
株式会社小糸製作所
航空機用灯具
3日前
テイ・エス テック株式会社
車両
8日前
日本プラスト株式会社
エアバッグ
22日前
ミネベアミツミ株式会社
車両用照明装置
8日前
日本プラスト株式会社
エアバッグ
3日前
豊田鉄工株式会社
サスペンションアーム
14日前
本田技研工業株式会社
電動車両
7日前
住友ゴム工業株式会社
タイヤ
21日前
住友ゴム工業株式会社
タイヤ
21日前
矢崎総業株式会社
配線板
8日前
住友ゴム工業株式会社
タイヤ
21日前
日本製鉄株式会社
構造部材
7日前
豊田合成株式会社
歩行者用エアバッグ装置
7日前
住友ゴム工業株式会社
タイヤ
7日前
住友ゴム工業株式会社
タイヤ
7日前
続きを見る
他の特許を見る









 特許ウォッチ
特許ウォッチ