TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024077680
公報種別
公開特許公報(A)
公開日
2024-06-10
出願番号
2022189764
出願日
2022-11-29
発明の名称
ドローンポート制御システム
出願人
株式会社セネック
代理人
個人
主分類
B64U
70/90 20230101AFI20240603BHJP(航空機;飛行;宇宙工学)
要約
【課題】ドローンがドローンポート上に配置した配送物をさらに別の場所まで運ぶ場合に、その仕組みをシンプルに構成し、さらにそのための設備・装置の設置コストを下げることである。
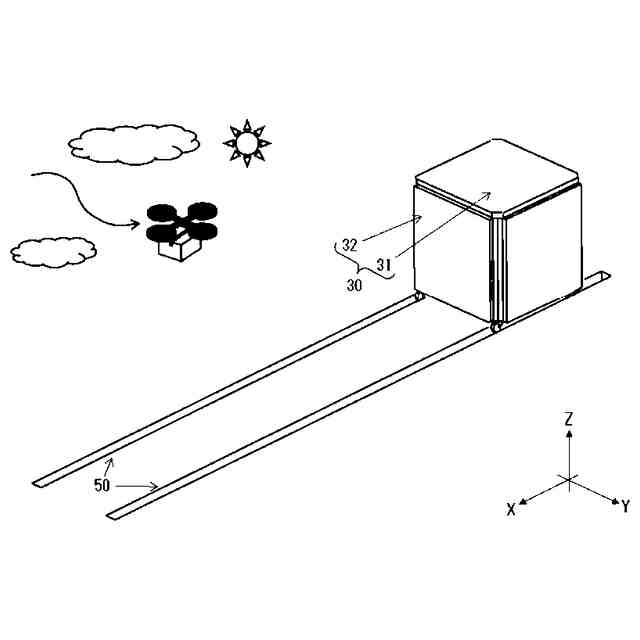
【解決手段】車輪10と本体部20と離着陸面30とを備え本体部20は車輪10の上に設けられ離着陸面30は本体部20の上に設けられているドローンポート1と、ドローンポート1を移動させるための駆動部60と、を備え、駆動部60には管理サーバ70または情報機器80またはドローン100からの制御信号によりドローンポート1を移動させるための電力が電源から供給されるドローンポート制御システムである。
【選択図】図15
特許請求の範囲
【請求項1】
車輪と本体部と離着陸面とを備え前記本体部は前記車輪の上に設けられ前記離着陸面は前記本体部の上に設けられているドローンポートと、
前記ドローンポートを移動させるための駆動部と、
を備え、
前記駆動部には管理サーバまたは情報機器またはドローンからの制御信号によりドローンポート1を移動させるための電力が電源から供給される、
ドローンポート制御システム。
続きを表示(約 1,200 文字)
【請求項2】
前記車輪は前記ドローンポートが前記離着陸面の法線と垂直な方向に移動することは許容し前記ドローンポートが前記離着陸面の法線と平行な方向に移動することは許容しないレールと係合している、
請求項1に記載のドローンポート制御システム。
【請求項3】
前記本体部は本体上面と本体側面とを備え、
前記離着陸面は離着陸本体面と離着陸外面とを備え、
前記離着陸外面は前記離着陸本体面の外周において前記離着陸本体面と回動可能に連接されており、
前記離着陸外面はその法線が前記離着陸本体面の法線と平行となる角度で固定することができ、
前記離着陸外面はその法線が前記本体側面の法線と平行となる角度でも固定することができる、
請求項1または請求項2に記載のドローンポート制御システム。
【請求項4】
前記本体部には前記離着陸外面の角度を変えるためのモーターおよび前記モーターと前記離着陸外面とを連結するシャフトが設けられ、
前記モーターには管理サーバまたは情報機器またはドローンからの制御信号により前記離着陸外面の角度を変えるための電力が電源から供給される、
請求項3に記載のドローンポート制御システム。
【請求項5】
前記離着陸外面の角度は、
前記離着陸外面の法線が前記離着陸本体面の法線と平行となる状態における前記離着陸外面の法線のうちの上向きの法線が離着陸本体面の中心に向かう方向へも変えることができる、
請求項4に記載のドローンポート制御システム。
【請求項6】
前記離着陸外面の角度の固定は、
前記離着陸外面の法線と前記離着陸本体面の法線とがなす角度が任意の位置でも行うことができる、
請求項5に記載のドローンポート制御システム。
【請求項7】
前記離着陸外面は複数あり、
一の前記離着陸外面とこれに隣り合う他の前記離着陸外面との間には離着陸外隣接面がそれぞれの前記離着陸外面と回動可能に連接されている、
請求項3に記載のドローンポート制御システム。
【請求項8】
前記離着陸外面をその法線が前記離着陸本体面の法線と平行となる角度で固定した場合において、
前記仮想水平面に対して前記離着陸外隣接面の法線と平行な方向に前記離着陸外隣接面を投影した形状の外周は二等辺三角形であり、
前記離着陸外隣接面に対して前記仮想水平面の法線と平行な方向に前記二等辺三角形の垂直二等分線を投影した仮想線において前記離着陸外隣接面は隣接第一面と隣接第二面に分割されており、
前記隣接第一面と前記隣接第二面とは前記仮想線の位置で回動可能に連接されている、
請求項7に記載のドローンポート制御システム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、ドローンポート制御システムに関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
従来、ドローンの様々な活用がなされるようになり、農業用途や物流用途、画像や動画の撮影など、幅広い用途にドローンが用いられるようになっている。それに伴い、ドローンを離着陸させる場所として、ドローンポートも種々のものが提案され、実用化されている。
【0003】
これらのドローンポートは多種多様で、自動車の荷台に設置したもの、物流倉庫に設置したものなど、用途に合わせていろいろなポートがある。なお特許文献1には、ドローンポートに荷下ろしされた配送物を受け取るように構成された配送物受取りデバイスと、建物内に配置され、受け取った配送物を保管場所の中に仕分けするように構成された配送物仕分けデバイスとを備えた技術が開示されている。
【0004】
また、核家族化により在宅者がいない時間が増え、高齢化社会がますます進むことで、ドローンがドローンポート上に配置した配送物を、例えば住宅の玄関や庭の軒先など、さらに別の場所まで運びたいというニーズがある。
【先行技術文献】
【特許文献】
【0005】
特表2022-500333号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところで、ドローンがドローンポート上に配置した配送物を、例えば住宅の玄関や庭の軒先など、さらに別の場所まで運ぶ場合に、その仕組みが複雑になり施設・設備・装置の設置が高額になるという課題があった。
【0007】
本開示の目的は、ドローンがドローンポート上に配置した配送物をさらに別の場所まで運ぶ場合に、その仕組みをシンプルに構成し、さらにそのための設備・装置の設置コストを下げることである。
【課題を解決するための手段】
【0008】
本開示のドローンポート制御システムは、車輪と本体部と離着陸面とを備え前記本体部は前記車輪の上に設けられ前記離着陸面は前記本体部の上に設けられているドローンポートと、前記ドローンポートを移動させるための駆動部と、を備え、前記駆動部には管理サーバまたは情報機器またはドローンからの制御信号によりドローンポートを移動させるための電力が電源から供給される。
【発明の効果】
【0009】
本開示によれば、ドローンがドローンポート上に配置した配送物をさらに別の場所まで運ぶ場合に、その仕組みをシンプルに構成し、さらにそのための設備・装置の設置コストを下げることができる。
【図面の簡単な説明】
【0010】
図1は、使用時のドローンポートを斜め上から見たイメージ図である。
図2は、使用時におけるドローンポートを斜め下から見たイメージ図である。
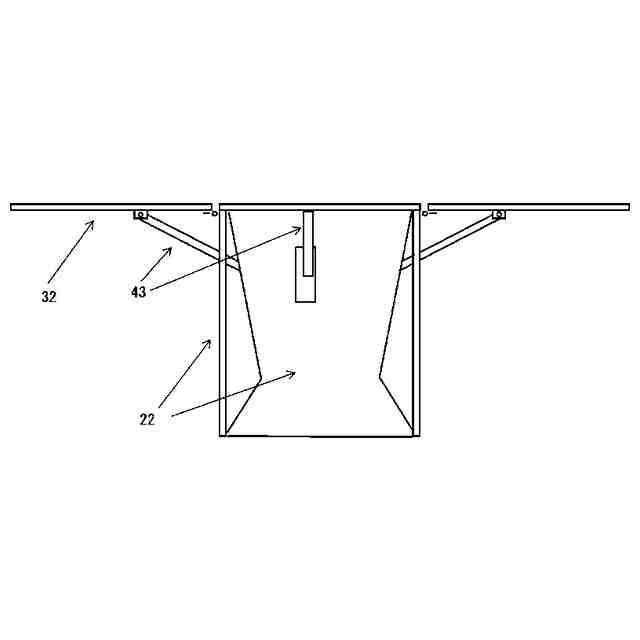
図3は、使用時におけるドローンポートを本体側面の方向から見た図である。
図4は、使用時におけるドローンポートを別の方向から見た図である。
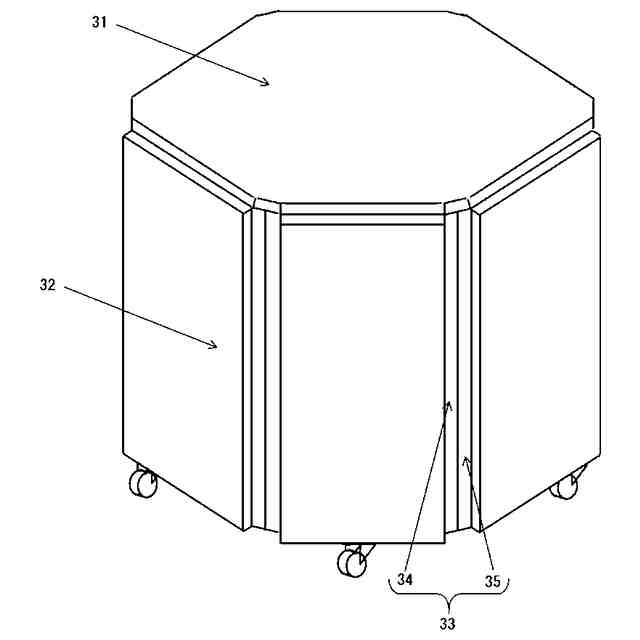
図5は、運搬時におけるドローンポートを示す斜視図である。
図6は、運搬時における別の実施形態のドローンポートを示す斜視図である。
図7は、運搬時におけるまた別の実施形態のドローンポートを示す斜視図である。
図8は、運搬時におけるさらに別の実施形態のドローンポートを示す斜視図である。
図9は、使用時における図7の実施形態のドローンポートを示す斜視図である。
図10は、使用時における図8の実施形態のドローンポートを示す斜視図である。
図11は、格納時の側面から見た断面図である。
図12は、格納時において仮想水平面に本体上面と離着陸本体面を投影したイメージ図である。
図13は、格納時において仮想垂直面に本体側面と離着陸外面を投影したイメージ図である。
図14は、格納途中のイメージを示す斜視図である。
図15は、ドローンポートの設置状態とドローンの運行状態を示すイメージ図である。
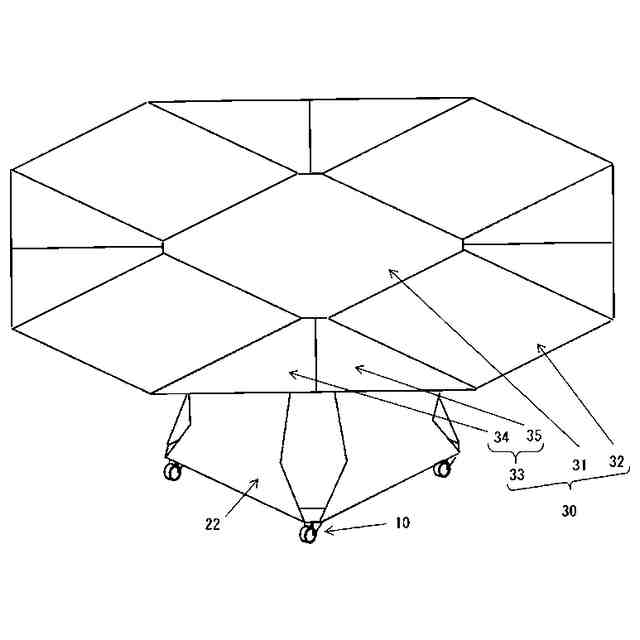
図16は、ドローンポートの設置状態においてドローンポートを展開した示すイメージ図である。
図17は、ドローンポートに配送物が配置された状態を示すイメージ図である。
図18は、ドローンポートが配送物のずれを修正するイメージ図である。
図19は、図18の状態におけるドローンポートの側面図である。
図20は、情報機器・管理サーバ・ドローン・ドローンポートの情報の送受信を示す概念図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
他の特許を見る






 特許ウォッチ
特許ウォッチ