TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024071048
公報種別
公開特許公報(A)
公開日
2024-05-24
出願番号
2022181775
出願日
2022-11-14
発明の名称
生産システム
出願人
株式会社FUJI
代理人
弁理士法人アイテック国際特許事務所
主分類
H05K
13/00 20060101AFI20240517BHJP(他に分類されない電気技術)
要約
【課題】作業者が補給ロボットの進行方向周辺の領域を認識し易くすると共に補給ロボットの動作時間を延長できるようにする。
【解決手段】生産システムは、生産施設の床面に沿って並ぶ複数のモジュールを含む生産ラインと、生産ラインに沿って移動し、各モジュールに対して生産に必要な部材を補給する補給ロボットと、複数のモジュールにそれぞれに設けられ、移動している補給ロボットの進行方向周辺の領域における床面に光を照射する光源部と、を備える。
【選択図】図3
特許請求の範囲
【請求項1】
生産施設の床面に沿って並ぶ複数のモジュールを含む生産ラインと、
前記生産ラインに沿って移動し、各モジュールに対して生産に必要な部材を補給する補給ロボットと、
前記複数のモジュールにそれぞれに設けられ、移動している前記補給ロボットの進行方向周辺の領域における前記床面に光を照射する光源部と、
を備える生産システム。
続きを表示(約 520 文字)
【請求項2】
請求項1に記載の生産システムであって、
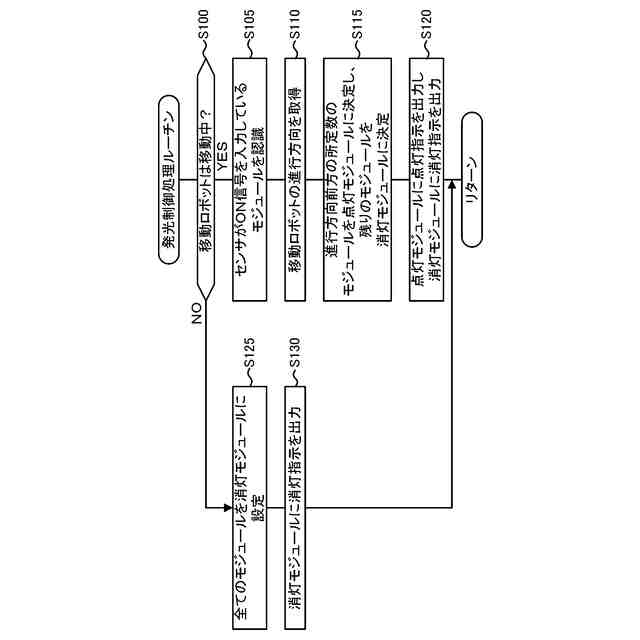
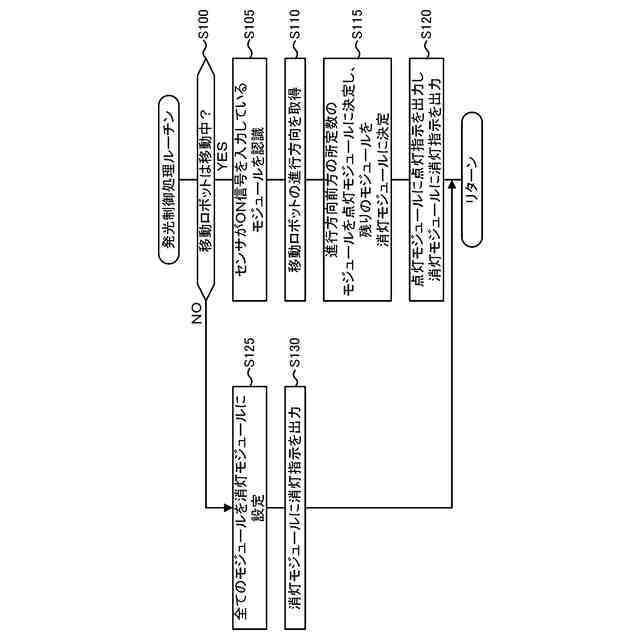
前記生産ラインに対する前記補給ロボットの位置と、前記補給ロボットの進行方向とを取得する取得部と、
前記取得部が取得した前記補給ロボットの位置に基づいて前記補給ロボットに対向するモジュールを認識し、前記補給ロボットに対向するモジュールから、当該モジュールよりも所定数だけ前記補給ロボットの進行方向前方にあるモジュールまでの各モジュールの前記光源部を発光させる光源制御部と、
を備える生産システム。
【請求項3】
請求項1または2に記載の生産システムであって、
前記補給ロボットが前記進行方向に移動するにしたがって、前記進行方向前方に位置するモジュールの前記光源部を順次追加で点灯すると共に前記進行方向後方に位置するモジュールの前記光源部を順次消灯する光源制御部
を備える生産システム。
【請求項4】
請求項1または2に記載の生産システムであって、
前記光源部は、前記補給ロボットに対して前記モジュールとは反対側に、前記複数のモジュールの並び方向に沿った直線状の光を前記床面に照射する、
生産システム。
発明の詳細な説明
【技術分野】
【0001】
本明細書は、生産システムについて開示する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
従来、複数の部品実装機が並べて配置された部品実装ラインと移動ロボットとを備える部品実装システムであって、作業者に対して移動ロボットの移動範囲を報知する部品実装システムが知られている。例えば、特許文献1には、それぞれの部品実装機に発光部が設けられており、それぞれの発光部を、移動ロボットの現在位置からの距離と、進行方向とに基づいて定められた異なる色で発光させることにより、作業者に移動阻害領域を報知するものが開示されている。移動阻害領域は、内側に障害物(例えば、作業者)があると移動ロボットの動作を妨げる可能性のある領域である。また、特許文献2には、移動ロボットに設けられた発光部で移動ロボットの進行方向を照射することで、作業者に対して警告領域を報知するものが開示されている。警告領域は、内部に障害物があると警告を発する領域である。
【先行技術文献】
【特許文献】
【0003】
国際公開第2021/173204号
特開2018-32279号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に開示されている部品実装システムでは、作業者自身が動作阻害領域に接近しているか否かを認識するためには、発光部の色を認識すると共に色に応じた距離を認識する必要があり、作業者が動作阻害領域を直感的に認識し難い場合も多い。そのため、経験の浅い作業者は、誤って移動阻害領域内に侵入するおそれがある。また、特許文献2に開示されている部品実装システムでは、作業者は警告領域を認識し易いものの、発光部は移動ロボットが備えるバッテリから電力供給を受けて発光する。そのため、移動ロボットの動作時間が短くなるおそれがある。
【0005】
本開示は、作業者が補給ロボットの進行方向周辺の領域を認識し易くすると共に補給ロボットの電力消費を抑制することを主目的とする。
【0006】
本開示では、上述の主目的を達成するために以下の手段を採った。
【課題を解決するための手段】
【0007】
本開示の生産システムは、
生産施設の床面に沿って並ぶ複数のモジュールを含む生産ラインと、
前記生産ラインに沿って移動し、各モジュールに対して生産に必要な部材を補給する補給ロボットと、
前記複数のモジュールにそれぞれに設けられ、移動している前記補給ロボットの進行方向周辺の領域における前記床面に光を照射する光源部と、
を備えることを要旨とする。
【0008】
この生産システムでは、複数のモジュールのそれぞれに、補給ロボットの進行方向周辺の領域を床面に光を照射する光源部が設けられている。これにより、作業者は、補給ロボットの進行方向周辺の領域を認識し易くなる。また、光源部は、補給ロボットから電力供給を受けて発光するものではないため、補給ロボットに光源部を設けた場合と比べて補給ロボットの電力消費を抑制することができる。
【図面の簡単な説明】
【0009】
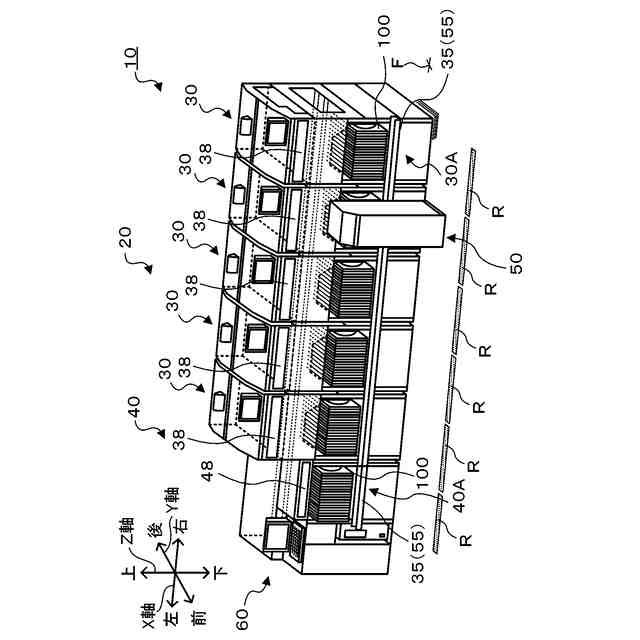
実装システム10の概略構成図である。
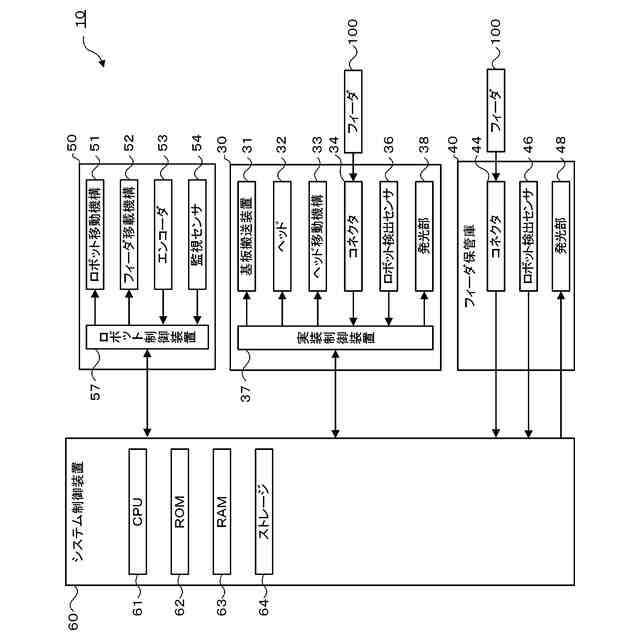
実装システム10の電気的な接続関係を示すブロック図である。
発光制御処理ルーチンの一例を示すフローチャートである。
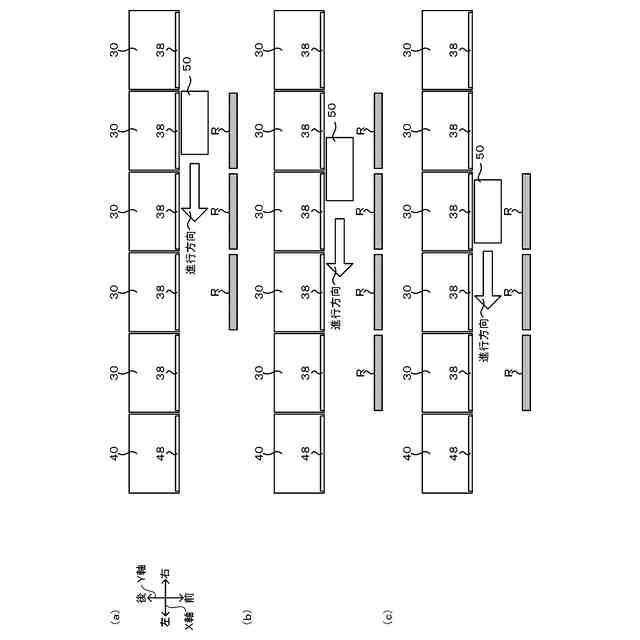
発光部Lが床面Fに光Rを照射する様子を示す説明図である。
【発明を実施するための形態】
【0010】
本開示の実装システムの実施形態について図面を参照しながら以下に説明する。図1は、実装システム10の概略構成図である。図2は、実装システム10の電気的な接続関係を示すブロック図である。図1の左右方向がX方向であり、前後方向がY方向であり、上下方向がZ方向である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
他の特許を見る
 特許ウォッチ
特許ウォッチ