TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024065851
公報種別
公開特許公報(A)
公開日
2024-05-15
出願番号
2022174918
出願日
2022-10-31
発明の名称
操作装置および台車
出願人
新東工業株式会社
代理人
弁理士法人 HARAKENZO WORLD PATENT & TRADEMARK
主分類
G05G
5/04 20060101AFI20240508BHJP(制御;調整)
要約
【課題】操作者に対して操作している実感を与えられる操作装置を提供する。
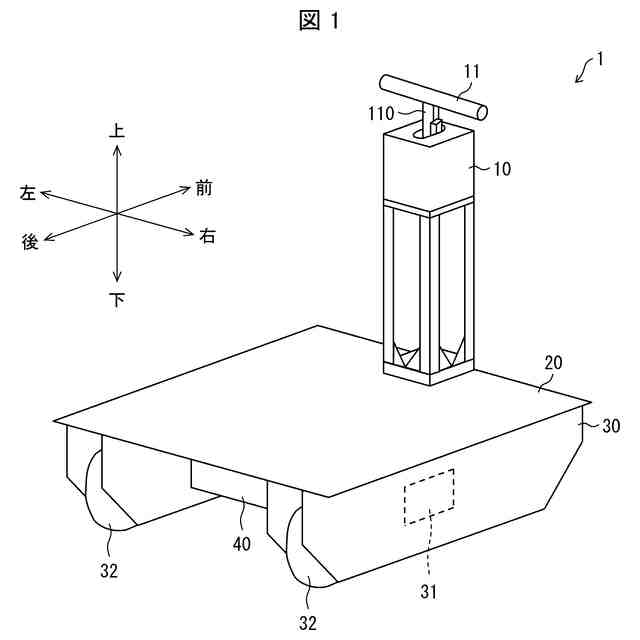
【解決手段】操作装置(10)は、操作対象を移動させるために操作者が行った操作を受け付ける。操作装置は、操作部(11)と、第1部材(14、15)と、第2部材(120)と、力覚センサ(12)とを備える。操作部は、傾動操作および回転操作の一方または両方が可能である。第1部材は、操作部に機械的に連結され、操作部の操作量(θ)に応じて変位する。第2部材は、第1部材を所定の停止位置で停止させる。力覚センサは、第2部材が第1部材を停止させているときに、第2部材に加わる力またはモーメントを検出する。
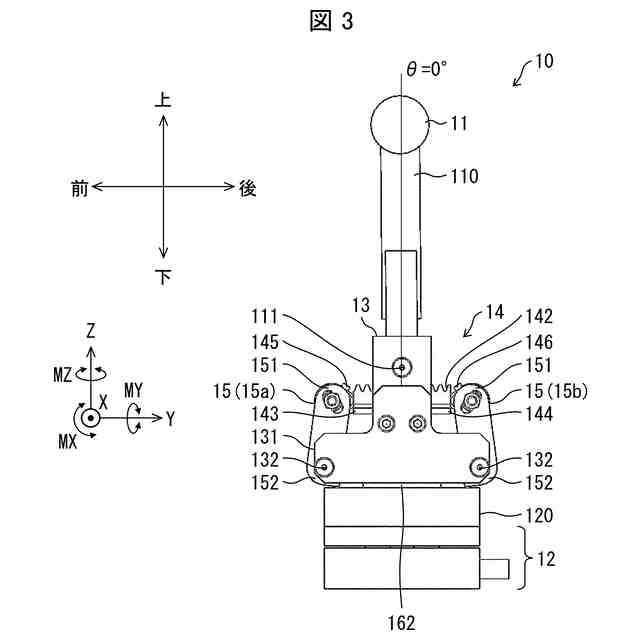
【選択図】図3
特許請求の範囲
【請求項1】
操作対象を移動させるために操作者が行った操作を受け付ける操作装置であって、
傾動操作および回転操作の一方または両方が可能な操作部と、
前記操作部に機械的に連結され、前記操作部の操作量に応じて変位する第1部材と、
前記第1部材を所定の停止位置で停止させる第2部材と、
前記第2部材が前記第1部材を停止させているときに、前記第2部材に加わる力またはモーメントを検出する力覚センサと、
を備える操作装置。
続きを表示(約 1,100 文字)
【請求項2】
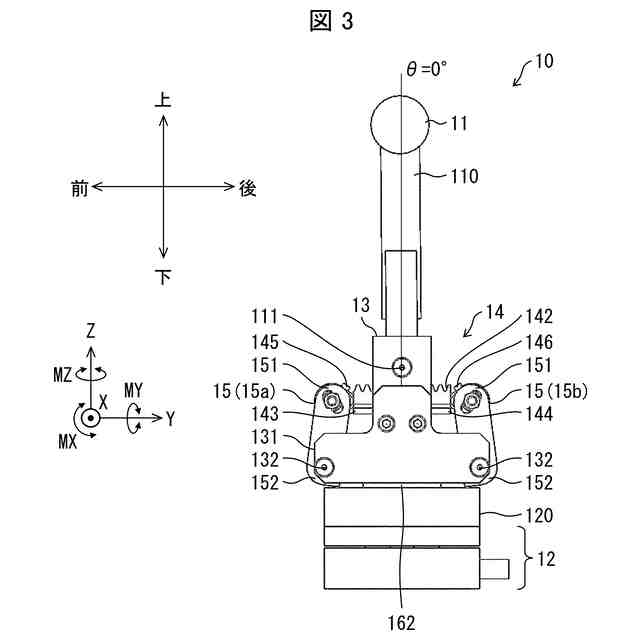
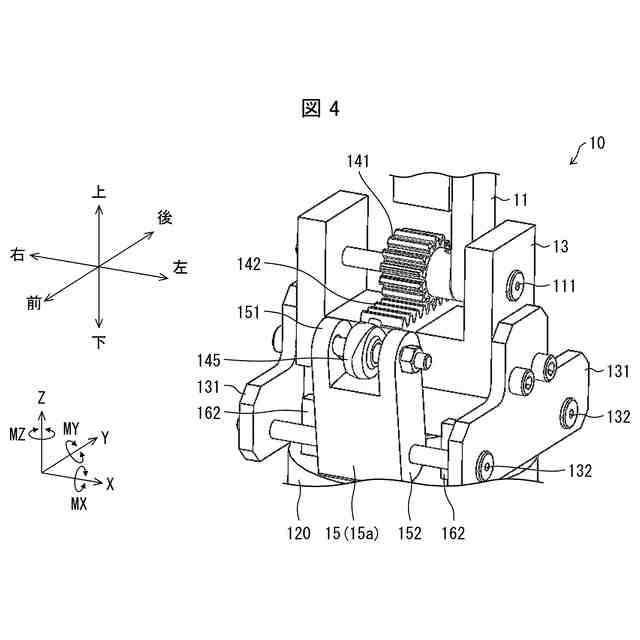
前記第1部材は、ピニオンギアと、前記ピニオンギアと噛み合うラックギアと、第1端が前記ラックギアに回転可能に連結されるカム部と、を含み、
前記操作部の傾動角に応じて前記ピニオンギアが回転することにより前記ラックギアが変位し、前記ラックギアの変位に応じて前記カム部が傾動し、
前記操作部の前記傾動角が所定角度に達すると、前記第1端と異なる前記カム部の第2端が前記第2部材に当接し、前記ラックギアの変位を停止させ、
前記力覚センサは、前記ラックギアの変位を停止させているときに、前記カム部の前記第2端から前記第2部材に加わるモーメントを検出する、請求項1に記載の操作装置。
【請求項3】
前記ラックギアを前記傾動角の所定の初期値に対応する位置に押し戻す方向に前記カム部を付勢する第1付勢部を更に備える、請求項2に記載の操作装置。
【請求項4】
前記所定角度は、5度以上15度以下である、請求項2に記載の操作装置。
【請求項5】
前記第1部材は、前記第2部材の上に設置され、前記操作部の回転角に応じて回転する回転部を含み、
前記第2部材は、前記回転部が設置された面から停止部が突出し、
前記操作部の前記回転角が所定角度に達すると、前記回転部が前記停止部に当接し、前記回転部の回転を停止させ、
前記力覚センサは、前記停止部が前記回転部の回転を停止させているときに、前記停止部に加わるモーメントを検出する、請求項1に記載の操作装置。
【請求項6】
前記回転部と前記停止部との間に設けられ、前記操作部の回転角を初期値に戻す方向に前記回転部を付勢する第2付勢部を更に備え、
前記回転部および前記停止部は、前記回転部が前記停止部に当接しているときに前記第2付勢部を収容する凹部を有する、請求項5に記載の操作装置。
【請求項7】
前記所定角度は、15度以上25度以下である、請求項5に記載の操作装置。
【請求項8】
前記操作部は、L字形またはT字形のハンドルである、請求項1に記載の操作装置。
【請求項9】
請求項1から8のいずれか一項に記載の操作装置と、
載置台と、
駆動部を有し、前記駆動部から供給された駆動力により走行する走行部と、
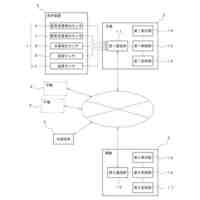
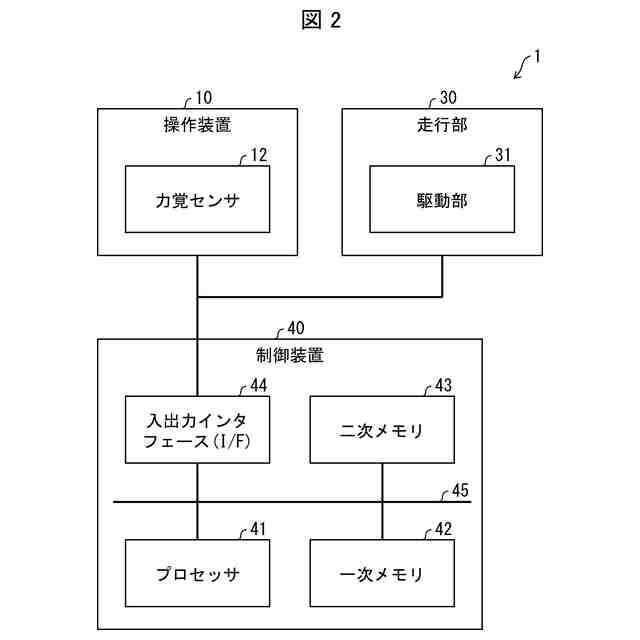
1または複数のプロセッサを有する制御装置と、を備え、
前記1または複数のプロセッサは、前記力覚センサにより検出された力またはモーメントに応じて前記走行部を制御する処理を実行する台車。
発明の詳細な説明
【技術分野】
【0001】
本発明は、操作装置および台車に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
力覚センサと一体になった操作レバーにより操作されるパワーアシスト機能付き作業台車が知られている(例えば、特許文献1)。
【先行技術文献】
【特許文献】
【0003】
特開2019-73086号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、力覚センサを用いた操作装置では、操作力を起歪体で検知する構造上、操作中にハンドルがほとんど動くことがない。そのため、操作者が操作している実感を得難いという問題があった。
【0005】
本発明の一態様は、操作者に対して操作している実感を与えられる操作装置の提供を目的とする。
【課題を解決するための手段】
【0006】
上記の課題を解決するために、本発明の一態様に係る操作装置は、操作対象を移動させるために操作者が行った操作を受け付ける。操作装置は、操作部と、第1部材と、第2部材と、力覚センサとを備える。操作部は、傾動操作および回転操作の一方または両方が可能である。第1部材は、操作部に機械的に連結され、操作部の操作量に応じて変位する。第2部材は、第1部材を所定の停止位置で停止させる。力覚センサは、第2部材が第1部材を停止させているときに、第2部材に加わる力またはモーメントを検出する。
【発明の効果】
【0007】
本発明の一態様によれば、操作者に対して操作している実感を与えられる。
【図面の簡単な説明】
【0008】
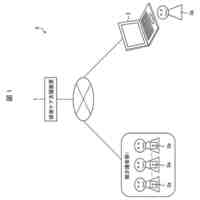
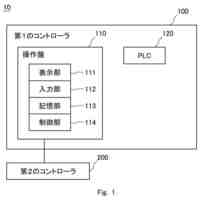
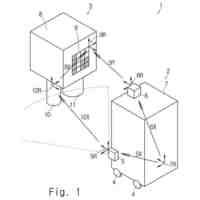
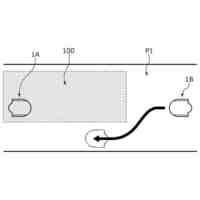
本発明の一実施形態に係る台車の一構成例を示す図である。
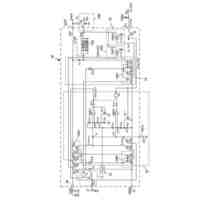
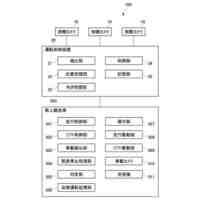
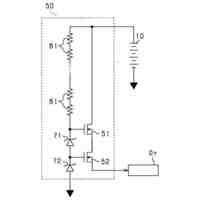
本発明の一実施形態に係る台車のシステム構成図である。
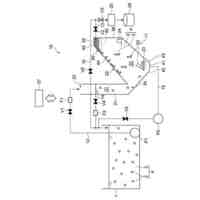
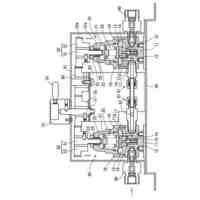
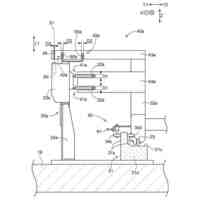
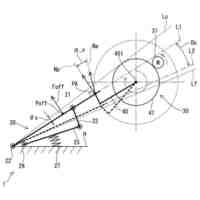
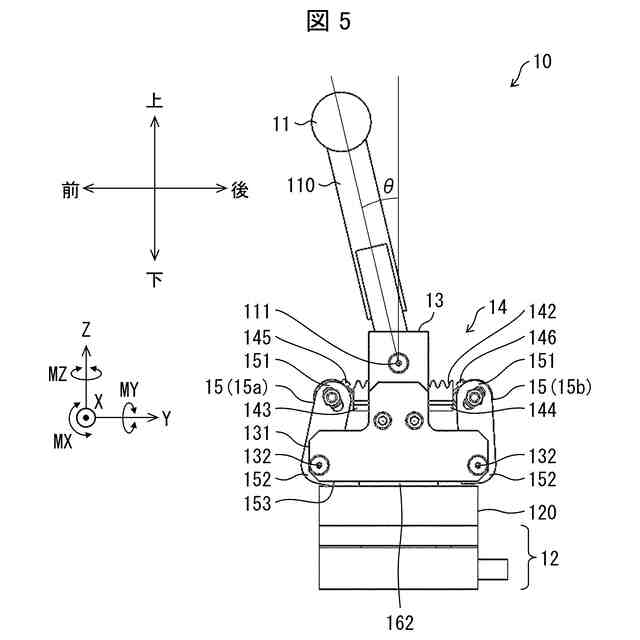
本発明の一実施形態に係る操作装置の内部構成を示す側面図である。
図3のラックアンドピニオンの周辺を拡大した斜視図である。
本発明の一実施形態に係る操作装置の内部構成を示す側面図であり、操作部が前方に傾動した状態を示す。
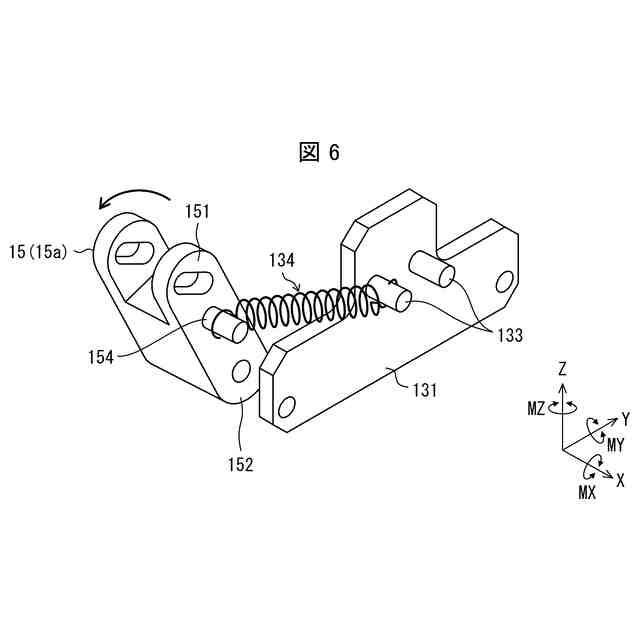
操作部の傾動角を初期値に戻すための付勢部材の一例を示す。
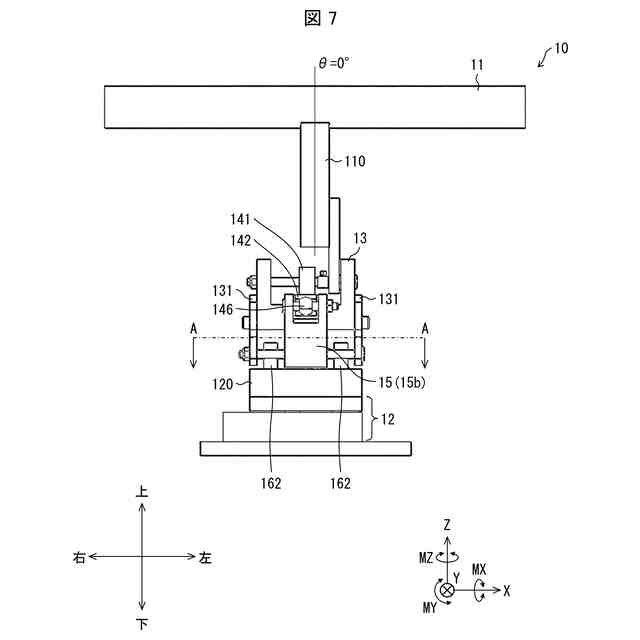
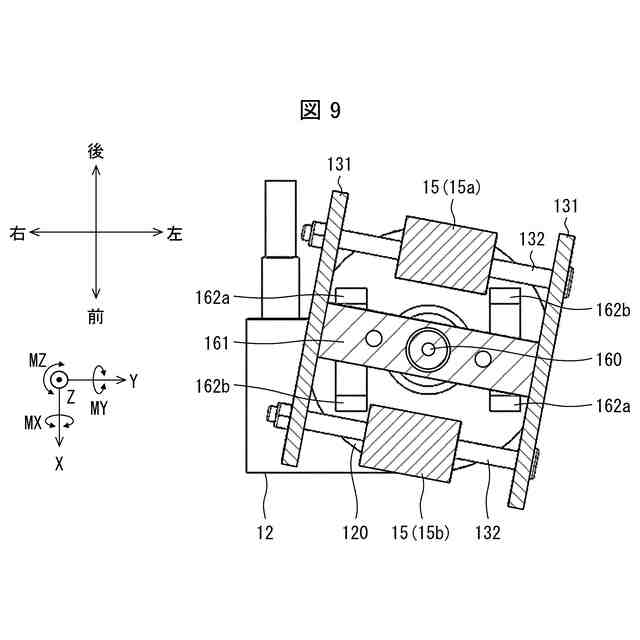
本発明の一実施形態に係る操作装置の内部構成を示す背面図である。
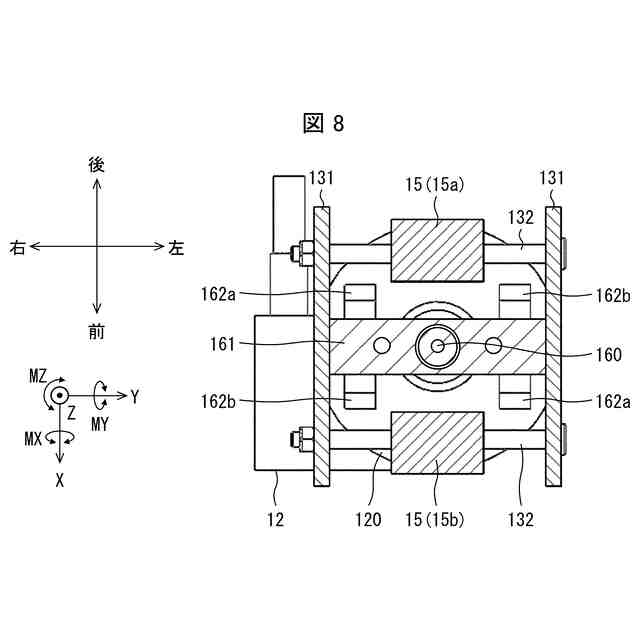
図7のA-A断面図である。
図8の断面図から回転部を時計回りに回転させた状態を示す。
操作部の回転角を初期値に戻すための付勢部材の一例を示す。
【発明を実施するための形態】
【0009】
〔本開示の実施形態の概要〕
最初に、本開示の実施形態の概要を説明する。
【0010】
(条項1) 操作対象を移動させるために操作者が行った操作を受け付ける操作装置であって、傾動操作および回転操作の一方または両方が可能な操作部と、前記操作部に機械的に連結され、前記操作部の操作量に応じて変位する第1部材と、前記第1部材を所定の停止位置で停止させる第2部材と、前記第2部材が前記第1部材を停止させているときに、前記第2部材に加わる力またはモーメントを検出する力覚センサと、を備える操作装置。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
新東工業株式会社
積層造形品の処理方法
4日前
新東工業株式会社
排泄ケア支援装置及び排泄ケア支援方法
1か月前
新東工業株式会社
光合成微生物回収装置及び光合成微生物回収方法
15日前
株式会社豊田自動織機
自動走行体
9日前
株式会社FUJI
工作機械
1か月前
エイブリック株式会社
基準電流回路
1か月前
トヨタ自動車株式会社
制御システム
1か月前
日昌電気制御株式会社
管理システム
2か月前
株式会社ユタカ
半自動切換装置
2か月前
株式会社ダイフク
搬送設備
1か月前
トヨタ自動車株式会社
マーカースタンド
1か月前
株式会社豊田自動織機
自律走行車両
2か月前
株式会社デンソー
電子制御装置
8日前
株式会社フカデン
外周部加工システム
19日前
日立建機株式会社
自律走行システム
23日前
大阪瓦斯株式会社
二次圧制御機構
26日前
大阪瓦斯株式会社
二次圧制御機構
26日前
株式会社デンソー
移動体制御装置
16日前
ミツミ電機株式会社
半導体集積回路装置
1か月前
横河電機株式会社
電圧電流変換回路
1か月前
株式会社デンソー
車両用電子制御装置
1か月前
株式会社ダイフク
搬送設備の検査装置
26日前
ニチコン株式会社
電源装置
2か月前
エンゼルグループ株式会社
無人搬送システム
1か月前
シンフォニアテクノロジー株式会社
共振抑制制御装置
2か月前
シンフォニアテクノロジー株式会社
共振抑制制御装置
2か月前
川崎重工業株式会社
操作レバー装置、及びその組立方法
8日前
三菱電機株式会社
運転支援システムおよび運転支援方法
16日前
トヨタ自動車株式会社
適合システム及び適合方法
29日前
株式会社FUJI
工作機械
2か月前
オークマ株式会社
制御装置
1か月前
株式会社FUJI
工作機械
2か月前
トヨタ自動車株式会社
適合システム及び適合方法
29日前
株式会社オカムラ
自律移動ロボット
1か月前
株式会社デンソー
シリーズ電源
2か月前
株式会社デンソー
アクセル装置
19日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ